
Fターム[3D246JB53]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | テーブル値制御 (241)
Fターム[3D246JB53]に分類される特許
121 - 140 / 241
車両運動制御装置
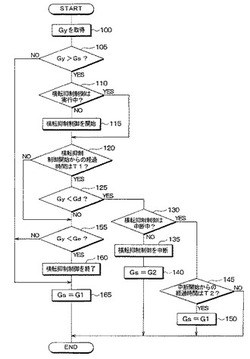
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
車両制御装置

【課題】燃費や安全面での不必要な制動操作による制動力の発生を少なくすることにより、エネルギー損失の増大を防止することができる車両制御装置を提供する。
【解決手段】 ECU30は、取得した道路形状から車両の加速度パターンを生成し、さらには、車両の速度パターンを生成する。この車速パターンにおける車両の目標速度と現在車速とを比較する。その結果、現在車速が車両の目標速度よりも大きくない場合には、減速支援を実行する。減速支援では、回生可能減速度に到達するまでは、ブレーキ踏み込み量に対して、要求減速度が小さくなるように制御し、回生可能減速度の範囲で減速要求を行いやすくする。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
ブレーキ液圧制御装置
【課題】ポンプの駆動態様に関係なく電磁弁の応答速度を速めることができ、ホイールシリンダ内のブレーキ液圧を好適に調整できるブレーキ液圧制御装置を提供する。
【解決手段】ECU19は、ポンプからのポンプ吐出量を検出する主制御部41と、リニア電磁弁23a,23bを制御するための差圧指令信号IPsubを生成する差圧指令信号生成部50と、ポンプ吐出量に応じたアクティブノイズRNaを生成するノイズ生成部51及び振幅調整部52と、差圧指令信号IPsubにアクティブノイズRNaを重畳させて重畳指令信号IPpluseを生成する重畳判定部53と、重畳指令信号IPpluseに応じリニア電磁弁23a,23bを制御するDUTY比設定部54とを備えている。
(もっと読む)
車両制御装置および車両制御方法
【課題】走行実績のある走行情報を使用して、安全な運転計画を生成することが可能な車両制御装置および車両制御方法を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車の走行実績のある走行情報(前後Gx、横Gy、および位置情報等を含む)を入力し、走行実績のある前後Gxおよび横Gyに基づいて、運転計画の対象となる道路の路面μを推定し、推定した路面μに基づいてタイヤ発生力を算出し、算出したタイヤ発生力を超えない条件で運転計画を生成する。
(もっと読む)
車両挙動制御装置
【課題】より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることを可能とする。
【解決手段】車両が横滑りに至った不安定領域R2となるより前の状態である横滑り前状態を検出し、横滑り前状態が検出されたときに旋回外側後輪に対して制動力を発生させる。この旋回外側後輪に発生させた制動力によって、旋回外輪に対して掛かる荷重が増加させられ、車両の横力が増加させられる。このため、車両の横滑りを発生させ難くすることが可能となり、いわゆるスロースピンのような緩やかな車両挙動低下を事前に抑制することができる。よって、より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることが可能となる。
(もっと読む)
ブレーキ制御装置
【課題】電気エネルギーの回収効率を高めることのできるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置において、制御手段は、回生制動力の制限値を設定し、設定した制限値と目標総制動力とにもとづいて目標回生制動力と目標液圧制動力とを決定して、回生ブレーキユニット10と液圧ブレーキユニット20とを協調制御する。制御手段は、液圧が所定値より大きいときは、所定値以下のときと比較して、回生制動力の制限値を大きくする。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
回生ブレーキ機能を備えたシステムに用いるブレーキ装置
【課題】ブレーキ装置において、急ブレーキ時の制動力の応答性を向上させる。
【解決手段】運転者が操作するブレーキペダル22と、ペダル反力を生成する反力バネ23と、インプットロッド24と、インプットロッド24の変位量に応じて液圧を生成するマスタシリンダ25と、ブレーキペダル22の変位速度に応じてインプットロッド24に伝達する力の大きさを可変するダンパ26と、ペダル変位量を検出するペダル変位センサ27と、液圧を生成する液圧アクチュエータ28と、液圧アクチュエータ28以下の液圧を検出する液圧センサ29と、で構成されている。急ブレーキ時にはダンパ26を介してブレーキペダル22に入力された力がインプットロッド24に伝達され、マスタシリンダ25に液圧が生じるため、液圧アクチュエータ28単独の作動より早く、大きな制動力を出力できる。
(もっと読む)
自動二輪車のブレーキ制御装置
【課題】前後輪連動ブレーキ・バイ・ワイヤ方式のブレーキシステムにおいて、ABS作動により、スポーツ走行機能が低下しないようにする。
【解決手段】ブレーキ連動判別部36は、後輪側のブレーキ操作(ペダルの操作)による入力液圧が連動ブレーキ開始圧力値以上になったときに前輪ブレーキを開始させる。連動ブレーキ開始圧力値は、スイッチ40によりABS作動時とABS非作動時とで切り替え可能にする。ABS作動時は連動ブレーキ開始圧力値として下部圧力値を選択し、ABS非作動時は連動ブレーキ開始圧力値として上部圧力値を選択する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。
【解決手段】
車両の緊急状態を回避するために車輪に制動トルクを付与する回避制御を実行するための第1目標量(回避制御の目標量)を演算する回避制御手段と、車両の安定性を確保するために、車輪のうちから選択車輪を決定し、この選択車輪に制動トルクを付与する安定化制御を実行するための第2目標量(安定化制御の目標量)を演算する安定化制御手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを第1目標量に基づいて制御するとともに、選択車輪に付与する制動トルクを、第1目標量及び前記第2目標量に基づいて制御する。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両運動制御装置
【課題】ロール角がロール限界値に達する可能性をより低くでき、横転抑制効果をより高くできるようにする。
【解決手段】実スリップ率Saの減少に対する横加速度Gyの増加率が大きい場合に、減圧モード時に設定される減圧デューティDDutyが制限されるようにする。これにより、W/C圧の減圧に伴う制動力の増加が抑制され、実スリップ率Saの減少が抑制されることになり、実スリップ率Saの低下に起因する横加速度Gyの増加、引いてはロール角の増加を抑制できる。したがって、ロール角がロール限界値を超えることを防止でき、横転抑制を効果的に行うことが可能となる。
(もっと読む)
ブレーキシステムを制御する方法
【課題】制動下で車両の後車軸が持ち上がるのを防止することを目的とした、車両のブレーキシステムを制御する方法を提供する。
【解決手段】より詳細には、本発明は、少なくとも1つの前輪および少なくとも1つの後輪を備える車両のブレーキシステム(19)を制御するための方法であって、後輪が持ち上がる少なくとも1つの状態が存在するかどうかを判定するステップと、そうした状態が存在する場合に、車両のブレーキシステムによって前輪に加えられる制動の作用力を制限および/または低減するステップとを含むことを特徴とする方法に関する。
(もっと読む)
ブレーキ力取得装置
【課題】ブレーキ力取得装置の改良を図る。
【解決手段】アンカ16にブレーキシューが当接することによって荷重が作用する場合に、ドラムの摩擦面に直交する方向に並べて圧縮力検出素子46,48が配設される。また、圧縮力検出素子46,48は、剛体である荷重作用部50とアンカ本体62等とに把持される。荷重作用部50に作用する荷重は、圧縮力検出素子46,48と連結体54,56とによって受けられる。そのため、荷重作用部50に作用する荷重は、圧縮力検出素子46,48によって検出された圧縮力の和に応じた大きさとして取得することができ、荷重作用点Qの基準点Pからのずれ量xは、圧縮力検出素子46,48によって検出された圧縮力の差に応じた大きさとして取得することができる。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
ブレーキ力取得装置
【課題】ブレーキ力取得装置の圧縮力検出素子の耐久性を向上させる。
【解決手段】アンカ部材16において、圧縮力検出素子40が剛体である荷重作用部50を介して荷重Fを受ける構造となっており、かつ、荷重作用部50に加えられる荷重が、一対の連結部54,56と、それの中間にある圧縮力検出素子40とが受ける構造となっている。その結果、偏心荷重によって、圧縮力検出素子40に曲げ力が加えられ難くすることができ、その分、圧縮力検出素子40の耐久性を向上させることができ、寿命を長くすることができる。
(もっと読む)
連続常用制動機を統合された制動システム
本発明は、車両(10)の制動システムの制御方法であって、車両が少なくとも1つの機関(12)、常用制動機(20)及び連続常用制動機(22)を持ち、連続常用制動機(22)の制動作用を求めるために、
a)車両(10)の少なくとも加速段階中に、差滑り−駆動力−相関量(FK)が求められ、
b)少なくとも制動操作段階中に、連続常用制動機(22)により発生される制動力を示す連続制動力量(FDB)が、制動の際生じる差滑り(DS)、差滑り−駆動力−相関量(FK)、及び車両(10)の常用制動機(20)により発生される制動力成分(FV,FH)を使用して求められる。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、停止距離に応じて適正な速度パターンを生成し、燃費の向上を可能とする。
【解決手段】目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、
目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、速度パターンにおいて車両の減速を行う第1減速パターンを生成する第1減速パターン生成手段と、第1減速パターンの継続期間がより長くなるように速度パターンを修正する減速パターン修正手段とを設ける。
(もっと読む)
121 - 140 / 241
[ Back to top ]