
Fターム[3D246JB53]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | テーブル値制御 (241)
Fターム[3D246JB53]に分類される特許
41 - 60 / 241
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
回生制動制御装置

【課題】回生式制動装置を備える車両において回生効率を向上させる。
【解決手段】回生制動制御装置24は、車両の前輪に回生制動力を伝達可能な第1回生制動手段56f、及び車両の後輪に回生制動力を伝達可能な第2回生制動手段56rの各々を制御する回生制動制御装置であって、第1回生制動手段及び第2回生制動手段の各々に要求される回生制動力の合計値である要求回生制動力を算出する要求回生制動力算出手段と、要求回生制動力を、第1回生制動手段及び第2回生制動手段で配分して実現する場合のエネルギ損失が、最も小さくなる配分比を算出する配分比算出手段と、算出された配分比で要求回生制動力を実現するように、第1回生制動手段及び第2回生制動手段を夫々制御する制御手段とを備える。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うこと。
【解決手段】車速を取得する車速取得手段と、車体の上下挙動を取得する上下挙動取得手
段と、前記上下挙動取得手段が取得した車体の上下挙動の最大値を取得する上下挙動最大
値取得手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記車速取
得手段が取得した車速とに基づいて、制動力の上限を示す上限指令値を設定する上限指令
値設定手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記上限指
令値設定手段が設定した前記上限指令値とに基づいて、制動力の指令値を設定する制動力
指令値設定手段と、前記制動力指令値設定手段が設定した制動力の指令値に基づいて、車
輪に対する制動力を付与する制動手段とを備える。
(もっと読む)
自動二輪車用ブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】第2モード第1区間の始点から第2モード第2区間の終点までの間の途中の点Pmで、操作量に対する前輪の制動力の増加率を、変化させる。点Pmまでの操作量の増加率は、曲線の傾きα1で表すことができる。点Pm以降の操作量の増加率は、曲線の傾きα2とする。好ましくは、α1<α2に設定する。
【効果】途中までの増加率より、途中以降の増加率を大きく設定することで、操作量に車体発生源速度を一次比例させることができる。操作量に車体発生源速度を一次比例させると、制動の初期(操作量が小さいとき)においては姿勢制御優先で前後輪の制動力の変化量を小さくすることができ、制動の後半(操作量が大きいとき)においては制動作用が優先される。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
自動車用自動減速装置
【課題】実目標位置での目標速度に対する速度誤差を小さくし、運転者に与える違和感の少ない減速パターンを設定可能な自動車用自動減速装置を提供する。
【解決手段】目標位置P0での目標速度vtに向かって初めは大きい減速度a1で減速を行い、目標位置P0に向けて小さい減速度a2とすることにより実目標位置Prでの速度誤差Δvを小さくすることができる。自動ブレーキをかける際には、ナビゲーション装置での位置検出誤差を原因として目標速度vtに達する地点がばらつくことになるので、第2減速度a2に対応する低いGで誤差を感じないようにすることができる。最初は、第1減速度a1に対応する大きなGで、目標地点に近づいたらGを弱くしているので、違和感が低減される。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤ形式のブレーキ装置において流路抵抗によってVSA装置などの液圧制御装置の機能が低下することを防止する。
【解決手段】ブレーキ装置1を、ブレーキペダル11の操作量Psに対応して液圧を発生するマスターシリンダ15と、マスターシリンダ15とホイールシリンダ2b・3bとの間に配置される電磁弁24a・24bと、電磁弁24a・24bよりもホイールシリンダ2b・3b側に設けられ、ブレーキ液圧を発生するモータ駆動シリンダ13と、モータ駆動シリンダ13とホイールシリンダ2b・3bとを結ぶ油路22e・22f上に設けられ、ホイールシリンダ2b・3bに供給されるブレーキ液圧を制御するVSA装置26とを有し、VSA装置26の動作時に、電磁弁24a・24bを開放した状態でモータ駆動シリンダ13を所定の目標加圧モータ角θatをもって加圧側に駆動する制御ユニット6をさらに有するようにする。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
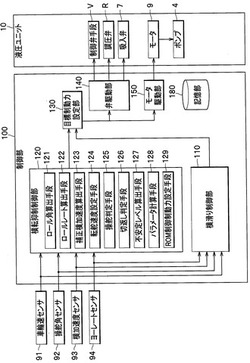
ブレーキシステム
【課題】圧力センサを用いないブレーキシステムにおいても、温度の変化によってブレーキフィーリングに影響を与えにくいブレーキシステムを提供することを課題とする。
【解決手段】ブレーキシステムに、ブレーキ操作子12F、12Rの回動量を検出する入力側ポテンショメータ28F、28Rと、第2マスターシリンダ36F、36Rの押圧量を検出する出力側ポテンショメータ38F、38Rと、車輪制動手段のブレーキキャリパの温度又はこのブレーキキャリパの作動液の温度を検出する温度センサ42F、42Rとを設けた。
【効果】従来の2個の圧力センサを、2個のポテンショメータと1個の温度センサに置き換えた。温度センサで、ブレーキキャリパの温度又はこのブレーキキャリパの作動液の温度を検出し、この温度に基づいて制動力を補正させるようにした。結果、温度の変化によってブレーキフィーリングに影響を与えにくいブレーキシステムが提供される。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
ブレーキ制御装置
【課題】モータ回転数の推定誤差を低減することができる装置を提供すること。
【解決手段】モータMの端子間電圧VmotとモータMの特性に基づいてモータMの回転数を推定するモータ回転数推定部4を有するコントロールユニットCPUを備えた。ブレーキ回路内のブレーキ液を流動させるポンプPを回転駆動するモータMの回転数ωを推定する際、モータ端子間電圧VmotとモータMの特性(イナーシャIや容積効率η等の諸元、及びトルク−回転数特性)に基づいて推定する。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】ドライバがブレーキアシスト制御を解除するという意思がないにも拘わらず、ブレーキペダル踏み込み量の変化に伴って目標減速度が得られなくなることを防止する。
【解決手段】ブレーキアシスト制御中に、ドライバがブレーキアシスト制御を解除するという意思がなければ、W/C圧を目標減速度相当圧P1に一定に維持する。具体的には、踏み戻し判定やブレーキオフ状態、もしくは、踏み増し判定などが為されなければ、M/C圧の変動分をキャンセルできるように嵩上げ量Prを設定することで、ブレーキアシスト制御中はW/C圧を目標減速度相当圧P1にする。そして、踏み増し判定にてブレーキペダルの踏み増しが判定されると、嵩上げ量をブレーキオフ時と比べて勾配を大きくして減少させる。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
41 - 60 / 241
[ Back to top ]