
Fターム[3D246JB53]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | テーブル値制御 (241)
Fターム[3D246JB53]に分類される特許
81 - 100 / 241
自律走行制御装置
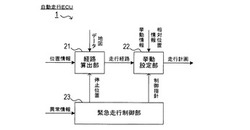
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
回生制動制御装置

【課題】エンジンブレーキ相当の制動力を適切に制御することで、回生効率を向上させることが可能な回生制動制御装置を提供する。
【解決手段】回生制動制御装置は、制動時において、回生制動力を発生可能に構成された回転電機を有する車両に好適に適用される。制御手段は、少なくとも回生制動力を用いて、アクセルがオフにされた際にエンジンブレーキ相当の制動力(エンジンブレーキ相当制動力)を発生させる制御を行う。具体的には、制御手段は、アクセルオフ時に発生させるエンジンブレーキ相当制動力を、車速が低いほど、当該車速が高い場合よりも大きくする制御を行う。これにより、回生による減速エネルギー回収量を増加させることができる。よって、回生効率を向上させることができ、燃費を向上させることが可能となる。
(もっと読む)
車両発進補助制御システム
【課題】運転者が違和感を覚えない車速での発進と発進後の車速を時間経過と共に運転者の意図する速さへと制御すること。
【解決手段】自車のいる路面の勾配を検出又は推定し、その勾配と発進からの経過時間又は運転者のアクセル操作からの経過時間とに応じて制動力制御による停車保持状態からの発進時の目標車速を設定し、その発進時に前記目標車速となるように動力源等の駆動装置や制動装置を制御して車速制御を行うこと。その目標車速については、降坂路で停車保持状態から発進させる場合、自重による加速度を抑える速さに設定すればよい。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置において、回生協調制御実行中に、マスタシリンダ内のブレーキ液圧の急激な変動を抑制して、減速度の急変を抑制し、運転者に与える違和感を小さくする。
【解決手段】入力ピストン32に連結されたブレーキペダルの操作に応じて、コントローラCによって電動モータ40を作動させ、入力ピストン32及びプライマリピストン10の位置に基づき、マスタシリンダ2内のブレーキ液圧を制御する。回生協調制御実行中に、プライマリピストン10の後退位置を制限してリザーバポート20が開かないようにする。これにより、回生制動の増大に伴うプライマリピストン10の後退により、リザーバポート20が開いてマスタシリンダ2内のブレーキ液圧が急激に変動するのを防止することができ、減速度の急変を抑制し、運転者に与える違和感を小さくすることができる。
(もっと読む)
電動ブレーキ装置
【課題】ブレーキペダルの操作量に応じた制動力を確保することができる電動ブレーキ装置を提供する。
【解決手段】 制動動作開始時にRAM31が記憶している剛性テーブルT0と制動間隔や制動時間等の制動状況などに伴い変化する電動キャリパ4の実際の剛性特性(位置対応の押付力特性)とが一致しない場合においても、1回の制動中に推力推定値が算出されるごとに、押付力指令値・回転位置対応特性(剛性テーブル)の更新を行うため、押付力指令値と発生押付力との偏差を低減することができ、換言すれば、電動キャリパ4の実際の剛性特性の状態に応じて押付力指令に対する追従性を確保することができる。
(もっと読む)
車両運動制御装置
【課題】ロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することができるようにする。
【解決手段】実横加速度Gyrが目標横加速度Gth以上であったとしても、舵角横加速度Gysとヨーレート横加速度Gyyの少なくとも一方が目標横加速度Gth未満になったときに、制御対象輪のW/C圧の増圧を禁止するようにしている。このため、横転を抑制するために積極的にアンダーステアを発生させるようにしてロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することが可能となる。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】どのような車線逸脱量にも対応でき、ポンプモータの作動を必要最低限にして、作動音や振動の発生を抑制し、長寿命化を図る。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、車速V0と、交差角αからのハンドル角θHの差と、第1の逸脱量yLとに応じてポンプモータ目標回転数設定用逸脱度Kを設定し、該ポンプモータ目標回転数設定用逸脱度Kに応じてブレーキ制御装置10のハイドロリックユニットのポンプモータの目標回転数Rpを設定し、ブレーキ制御装置10に出力してポンプモータの回転数を可変制御する。
(もっと読む)
車両のブレーキシステム
【課題】極力少ない電磁弁の作動によって回生協調ブレーキ制御を行うことでき、かつ、失陥時に制動力を確保可能な車両のブレーキシステムを提供すること。
【解決手段】ブレーキペダル操作によってマスタシリンダ圧を発生するタンデム型マスタシリンダと、前輪系統配管と後輪系統配管とを連通すると共に、第2マスタシリンダ室と前記後輪系統配管とを遮断する第1ポジションと、前記前輪系統配管と前記後輪系統配管とを遮断すると共に前記第2マスタシリンダ室と前記後輪系統配管とを連通する第2ポジションとを有するカットバルブと、後輪に接続され、回生力を発生可能なモータジェネレータと、液漏れ検出手段により液漏れが検出されていないときは前記カットバルブを前記第1ポジションとし、液漏れが検出されたときは前記カットバルブを前記第2ポジションに切り換えるコントローラを備えた。
(もっと読む)
車両運動制御装置
【課題】不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能な車両運動制御装置を提供する。
【解決手段】車両への積載重量に応じて横転抑制制御を許可する基準値となるしきい速度Vtを変化させる。このため、積載重量が大きく、横転し易い車両状態のときには、車速がより低速となっても横転抑制制御が実行されるようにすることができる。これにより、車速が横転傾向情報に応じた速度となるまで横転抑制制御を行うことが可能となる。また、車両への積載が行われていない非積載状態のときにはしきい速度Vtが大きな値となるため、車両が横転する可能性がないような場合にまで不必要に横転抑制制御が実行されてしまうことを抑制することができる。よって、不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能となる。
(もっと読む)
自動制動制御用ECU、車型学習方法および車両
【課題】自動制動制御用ECUを複数の車型の車両で共通化すること。
【解決手段】複数の異なる車型の車両に搭載され、車両の自動制動制御装置3を制御する自動制動制御用ECU1であって、車型および当該車型に対応するセンサの情報を、これらの情報を保持する車両ECU2から取得して記憶する車型情報学習部10と、車型情報学習部10が記憶した情報に基づいて車両に適合する制動制御パターンを選択する制動制御パターン選択部11と、を有する。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両用制動装置
【課題】セルフサーボ効果の有無を考慮して電動アクチュエータの作動を制御する車両用制動装置を提供する。
【解決手段】電子制御ユニット21のCPU21aは、車両の減速に伴って、車速センサ24から入力した車速Vが所定の小さな車速V0以下となるとき、セルフサーボ効果が無効化したと判定する。次に、CPU21aは、現在、電動アクチュエータ13に供給しているモータ電流値Iに対応して前記効果が発生している場合の荷重と前記効果が無効化した場合の荷重との荷重差ΔFを決定し、この荷重差ΔFを荷重センサ22から入力した検出荷重Fに加算して補正する。そして、CPU21aは、補正した検出荷重Fと車両を減速させるために決定した目標荷重Fdとの差分を計算し、この差分に基づいてアクチュエータ13の駆動を制御する。これにより、前記効果の有無によってアクチュエータ13に供給する電流値Iの急増を防止し、連続性を保つことができる。
(もっと読む)
自動車の倍力油圧ブレーキシステムを駆動するための方法、および自動車の倍力油圧ブレーキシステム用の制御機構
本発明は、自動車の倍力油圧ブレーキシステムを駆動するための方法に関するものであり、それが、ブレーキシステムの油圧ブレーキパワーに加えて、少なくとも一つのホイール(60)に作用する少なくとも一つの追加ブレーキパワーの増加または減少に関する情報を求めるステップ、ブレーキ入力要素(56)と一緒にパワー結合要素に結合されたブレーキ倍力装置(58)により供給される補助パワーを、情報を考慮してパワー差だけ変更することにより、追加ブレーキパワーの増加または減少に対応して、油圧ブレーキパワーを変更するステップ、そして求めた情報を考慮して、少なくとも一つのプランジャ(88a,88a’,88b,90)および/または少なくとも一つの二室シリンダの少なくとも一つの貯油室空間とブレーキシステムの貯油室外部の容積間で、ブレーキシステムのブレーキ媒体の体積量を移動することにより、パワー差に対応するバランスパワーをブレーキ入力要素(56)に作用させるステップを有している。更に本発明は、自動車の倍力油圧ブレーキシステム用の制御機構(25)に関するものである。 (もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
ブレーキ制御装置
【課題】大きな車両挙動に際し、その挙動抑制を図ることができるブレーキ制御装置を提供する。
【解決手段】車体の前部が上がるピッチ挙動が大きくなり、変形ピッチ角速度α・dθ/dtが所定値j01以下になって、挙動制御用制動信号算出回路14が出力する挙動制御用制動信号Fが目標制動力信号Kとしてアクチュエータ17に入力されると、前輪用のブレーキ手段が挙動制御用制動信号Fに応じた制動力を発生する。これにより、車体には前方方向の荷重移動が生じ、前記ピッチ挙動を抑制する。ピッチ運動の抑制を、ショックアブソーバの作動により行なうのではなく、車輪を制動することにより行なうので、仮にショックアブソーバがフルストロークし、ショックアブソーバによってはピッチ運動の抑制が困難な状況となる大きなピッチ挙動にも対応して、その大きなピッチ挙動の抑制を果たすことができる。
(もっと読む)
車両用電子制御装置
【課題】個々の運転者のトレーラーの使用方法によって、別の機能を制御するのに適したトレーラー電子制御装置を要求していた。個々の運転者に向けた特殊な制御の提供は、高価である。
【解決手段】ECUが制動に関連する車両に特定の制御パラメータを記憶するための不揮発性記憶手段を有するものであり、該ECUは、車両の一又は複数の補助機能用の動作データを保持するプログラマブル記憶手段をさらに別個に備え、前記データは、エラー状態に対して制動機能を保護するように所定のリストを参照して一又は複数の入出力変数及び制御アルゴリズムを検査するのに使用可能である。
(もっと読む)
81 - 100 / 241
[ Back to top ]