
Fターム[3D246JB53]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | テーブル値制御 (241)
Fターム[3D246JB53]に分類される特許
61 - 80 / 241
車両の制御装置
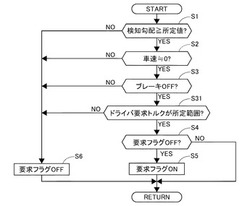
【課題】クラッチの耐久性を向上可能な車両の制御装置を提供すること。
【解決手段】アクセルヒルホールド時に、クラッチを開放し、ブレーキ制御手段によって車両停止状態を維持する締結要素保護制御を、アクセルペダル開度に基いて設定された要求トルクが勾配負荷トルク相当値に基づいて設定された上限トルクと下限トルクの範囲内か否かで判断し、要求トルクが上限トルクと下限トルクの範囲外となったときは、締結要素保護制御を解除する。
(もっと読む)
車両用制御装置

【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
車両用ブレーキ装置
【課題】回生ブレーキ装置における回生可能制動力を知りつつ制動制御を行うことで、良好な制動フィーリングおよび高い回生効率が得られる車両用ブレーキ装置を提供する。
【解決手段】液圧制動力を車輪に付与する液圧ブレーキ装置と、発電電動機に駆動される駆動輪に回生制動力を付与する回生ブレーキ装置と、液圧制動力および回生制動力を協調制御する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、発電電動機に指令した回生要求制動力FRから発電電動機が実行した回生実行制動力FGを減算して差分量DFを演算する手段(S9)と、回生要求制動力FRが発電電動機の実行可能な回生可能制動力FX(FXU、FXL)の範囲内であるか否かを判定する手段(S11)と、差分量DFが正でかつ回生要求制動力FRが回生可能制動力FXの範囲内である場合に液圧制動力FCの増加を抑制する手段(S12)と、を有する。
(もっと読む)
車両の運転支援装置
【課題】たとえ車両に大きなピッチング運動が生じて、制御対象を見失うような状況や、前方情報を大きく補正すべき状況が生じたとしても、可能な限り安定した精度で、レスポンス良く、前方の制御対象との衝突を回避する自動ブレーキ制御を安定して実行する。
【解決手段】ピッチング角θpが予め設定する閾値θpcより大きい場合は、少なくとも前回検出した制御対象の走行情報に基づいて制御対象と自車両1との衝突可能性を判定し、制御対象と自車両1との衝突可能性が有ることが判定された場合に自動ブレーキの介入による制動制御を行う。
(もっと読む)
車両用ブレーキ装置
【課題】自動制動制御機能により制動力を発生させるときに、回生ブレーキ装置へ制動力を配分して従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】マスタシリンダ、ポンプ、および液圧制御ユニットを有する液圧ブレーキ装置と、回生ブレーキ装置と、制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材の操作量に応じたドライバー目標制動力FT2を演算する手段と、ドライバー目標制動力FT2とは別に制動制御装置自身が各車輪の補正制動力FD2を設定する手段と、各車輪について、ドライバー目標制動力FT2および補正制動力FD2のうち大きい側を選択し基礎液圧制動力FB2を減算して補正後目標制動力FU2とする手段と、補正後目標制動力FU2を、各車輪の制御液圧制動力FC2と各駆動輪の回生制動力FG2とに配分制御する手段と、を有する。
(もっと読む)
車両の坂道発進補助装置
【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の制動制御装置
【課題】 ABS制御開始時の「G抜け感」を抑制することができる車両の制動制御装置を提供する。
【解決手段】 ABS制御の作動を予測するABS作動予測手段を設け、ブレーキコントローラ5は、ABS制御の作動が予測された場合、ABS制御の作動が予測された場合、ブレーキ液圧ユニット19の性能で決まる摩擦制動力上昇勾配に合わせた減少勾配で回生制動力をゼロまで減少させる。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生制動力が不足する制動シーンにおいて、ポンプモータの作動を必要最小限に抑えることで、ポンプモータの耐久信頼性の向上を達成すること。
【解決手段】電動車両のブレーキ制御装置は、ブレーキ液圧発生装置1とVDCブレーキ液圧ユニット2とモータコントローラ8と統合コントローラ9を備えた。ブレーキ液圧発生装置1は、ブレーキ操作に応じた基本液圧を発生する。VDCブレーキ液圧ユニット2は、ポンプモータ21と液圧ポンプ22を有し、基本液圧の増圧・保持・減圧を制御する。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を基本液圧分と回生分の総和で達成し、不足する回生分を基本液圧の加圧分により補償する制御を行うと共に、基本液圧の加圧分による補償制御中、回生制動力が増加方向であるか減少方向であるかに応じてポンプモータ21のオン・オフ制御を行う。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
ブレーキ制御装置
【課題】マスタシリンダと液圧ユニットを繋ぐ配管側と、液圧ユニットとホイルシリンダとを繋ぐ配管側とでは液圧剛性が異なるため、圧力変化に基づく演算に誤差が生じ、適切なベース圧が得られず、運転者に違和感を与えるという問題があった。運転者に違和感を与えることなくブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】ブレーキ制御装置において、ポンプの吐出流量に応じてマスタシリンダ圧を補正し、補正されたマスタシリンダ圧に基づいてホイルシリンダ圧を増減圧制御することとした。
(もっと読む)
四輪駆動車の制御装置
【課題】駆動系に付加される捩れトルクを低減して、駆動系部品の耐久性を向上する。
【解決手段】センターデフロック状態での旋回走行中に、駆動系に蓄積された捩れに伴う発生捩れトルクTh(DS捩れトルクThDS)が所定トルク(DS許容トルクTy)以上となる駆動系の捩れ状態となった場合は、前輪14にホイールブレーキ装置96によるブレーキトルクTBが加えられるので、例えば前輪14にかかるDS捩れトルクThDSの一部をホイールブレーキ装置96によるブレーキトルクTBで分担することができる為、駆動系(フロントDS34)に実質的に付加されるDS捩れトルクThDSが低減される。よって、駆動系部品の耐久性が向上される。その為、例えば駆動系部品の耐久性を確保する為に駆動系部品を大型化したりする必要が無く、駆動系部品の小型化や軽量化を図ることができる。
(もっと読む)
車両の制動力制御装置
【課題】車輪ロックやABSによる減圧に伴う付加ヨーモーメントの減少を極力抑え、付加制動力を最小化して走行ロスを低減する。
【解決手段】旋回内輪に付加する総制動力FB、旋回内輪の総駆動力FDを算出し、旋回内輪に付加する総制動力FBに対する旋回内側前輪に付加する制動力の割合を制動力の前後配分比DBとして、タイヤのグリップ状態が限界に近づくに従って、制動力の前後配分比DBを静止時の接地荷重配分比に近い値から減少させて設定して、これら旋回内輪に付加する総制動力FBと旋回内輪の総駆動力FDと制動力の前後配分比DBとに応じて旋回内輪の前輪と後輪のそれぞれに付加する制動力FBf、FBrを算出する。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両用ハイブリッド駆動装置
【課題】発進クラッチが遮断されたモータ駆動走行モードから充電制動走行モードへ移行した場合でも、効率良くバッテリーを充電できるとともに大きな制動力が得られるようにする。
【解決手段】発進クラッチ26が遮断されたモータ駆動走行モードでの走行中にブレーキペダルが踏込み操作された場合に、前輪側要求制動力に対応する必要発電トルクTyoukyuが第2モータジェネレータMG2の最大発電トルクTMG2max を超える時には、その発進クラッチ26を締結し、第1モータジェネレータMG1および第2モータジェネレータMG2を何れも発電制御して上記前輪側要求制動力を発生させるとともに、得られた電気エネルギーでバッテリー46を充電する。これにより、2つのモータジェネレータMG1およびMG2を有効に用いてバッテリー46を効率よく充電できるとともに、大きな制動力が得られるようになり、エネルギー効率が向上する。
(もっと読む)
61 - 80 / 241
[ Back to top ]