
Fターム[3F022MM52]の内容
Fターム[3F022MM52]の下位に属するFターム
逸走防止 (18)
過巻防止
Fターム[3F022MM52]に分類される特許
201 - 220 / 229
自動倉庫用スタッカクレーンのキャビン落下防止装置

【課題】部品点数を減らし、簡易な構造でキャビンの落下を防止することができる自動倉庫用スタッカクレーンのキャビン落下防止装置を提供すること。
【解決手段】キャビン17には、二本のチェーンに対応してスイングレバー28が二つ設けられている。各スイングレバー28は、引っ張りばね31の付勢力により、該スイングレバー28をレバー支持ピン32を回動中心として下方へ回動させる方向へ付勢されている。スイングレバー28には、該スイングレバー28の下方への回動を係止ピン39に伝達するアーム41が係止ピン39に向けて延設されている。そして、チェーンが切断され、スイングレバー28が下方へ回動した際、アーム41によってスイングレバー28の下方への回動が係止ピン39に伝達されることで係止ピン39が下降して該係止ピン39のストッパピン36の係止状態が解除される。
(もっと読む)
搬送装置

【課題】 異常状態の物品搬送用移動体を退避箇所に移動させる作業の簡素化およびその作業にかかる時間の短縮化を図る。
【解決手段】 複数の物品移載箇所Kを経由するように設置される軌道7上を移動する物品搬送用移動体4が複数台設けられ、それら複数台の物品搬送用移動体4の作動を制御する制御手段が設けられ、制御手段は、複数台の物品搬送用移動体4のいずれかが異常状態である場合に、正常状態の物品搬送用移動体にて異常状態の物品搬送用移動体4を退避箇所Tに押し移動させるべく、複数の物品搬送用移動体4の移動を制御する退避処理を実行可能に構成されている。
(もっと読む)
搬送台車の障害物検出装置
【課題】天井走行式搬送台車を用いる搬送システムにおいて、的確に障害物を検出することにより安全性を確保することができる搬送台車の障害物検出装置を提供する。
【解決手段】 搬送台車の障害物検出装置1では、測距ビームスキャン検出装置2により測距ビームを予め登録した距離・角度でスキャンさせることにより形成される仮想平面で定義される監視領域内において障害物を検出する。測距ビームスキャン検出装置2が障害物を検出した場合は、障害物報知装置3で警告灯3aを点灯し、警告音出力装置3bで警報を鳴らす。又は、台車制御装置4で無線又は有線の通信手段4aを介して搬送台車10を減速・停止さる。尚、測距ビームスキャン検出装置2は、障害物を検出した場合に光の放射を停止する安全対策機能が付加されている。
(もっと読む)
収納ラック振動絶縁装置及び関連する収納ラックシステム
複数の支柱を供えた床に設置される収納ラックシステムが、交差した通路側の面よりも下方の通路側の面がより柔軟であり、少なくとも第一の支柱及び第二の支柱が交差する通路側の面に互いに近接して備えられる。収納ラックシステムを持つ収納ラック振動絶縁装置は、少なくとも地震の振動を吸収し、散逸させる構造を持ち、この構造は少なくとも交差する通路側の面での収納ラックシステムの自然の周波数を減少させる第一の支柱及び第二の支柱の間に第一に配されるよう設置される。
地震の振動を吸収し、散逸させる構造は、収納ラックシステムに接続可能な第一の部材と、床と接続可能な第二の部材を備える。少なくとも1つの支柱サポートアセンブリが床面とともに動くように、少なくとも第一の支柱及び第二の支柱が取り付けられる。構造は確実に交差する通路側の面に第一の支柱及び第二の支柱を制限する。
(もっと読む)
自動倉庫
【課題】 人が台車5を乗り越えてクレーン通路2内へ侵入することを確実に防止する
ことができる自動倉庫を提供すること。
【解決手段】 複数の荷格納空間11を備えたラック1と、クレーン通路2を走行する
スタッカクレーン3と、台車通路4を走行し、スタッカクレーン3に対し荷Wの受け渡し
を行う受渡位置Aと外部に対し荷Wの出し入れを行う入出庫位置Bとの間を往復移動する
台車5と、クレーン通路2と台車通路4との間に設けられた受渡開口部64とを備えた自
動倉庫であって、台車5上に、台車5が入出庫位置Bにあるとき前記受渡開口部を閉鎖す
る移動フェンスを設置した。
(もっと読む)
自動的に医薬品を棚から検索し搬出入する医薬品棚。
【課題】医薬品を調合するとき、同時期に複数の患者の医薬品を処理でき、顧客の患者を待たせない医薬品調剤装置(棚)を提供する。
【解決手段】予め医薬品別に医薬品を個々のパレット10に収めておき、決められた前後の棚のXYZ座標上にパレットを配置し、パレットを運ぶ部材が前後の棚の間のX、Y、Z軸の上を駆動し指定された医薬品が入ったパレットを自動的に搬出口へ移動し搬出する。使用者の薬剤師がパレットより医薬品を必要量だけ取り出し、医薬品取り出し完了ボタンを押しておくとパレットを運ぶ部材が前後の棚の間のX、Y、Z軸の上を駆動し自動的にパレットを元の医薬品棚へ移動収納する。複数のステーションを横断的にこの作業が行われることにより薬剤師が交錯することなく同時期に複数の患者に対応できるようにした装置。
(もっと読む)
物品搬送設備
【課題】目標水平移動距離情報と目標昇降移動距離情報とを取得する作業の簡素化。
【解決手段】個体差学習運転用の移載装置4に装備の制御手段が、複数の物品収納棚1のうちの一部の物品収納棚1が備える複数の収納部のうちの少なくとも一部を学習対象とする学習運転により検出した水平移動距離検出手段の水平移動距離検出情報および昇降移動距離検出手段の昇降移動距離検出情報と、学習運転用の移載装置4に装備の制御手段が学習運転によって検出した水平移動距離検出手段の水平移動距離検出情報および昇降移動距離検出手段の昇降移動距離検出情報との比較により個体差情報を求め、かつ、学習運転を実行していない収納部の目標停止位置を示す目標水平移動距離情報および目標昇降移動距離情報を、学習運転用の移載装置4に装備の制御手段が学習運転によって求めた目標水平移動距離情報および目標昇降移動距離情報を個体差情報にて補正することにより求める。
(もっと読む)
医療品検出装置
【課題】 医療品収納部に載置された医療品の種類と数を含む載置医療品情報を正確に且つ容易に作成して取得でき、医療品載置部への医療品の出し入れ作業を簡単化でき、構造を簡単化し製作コストを抑えることができる、医療品検出装置を提供する
【解決手段】 医療品収納庫2の各医療品収納棚10に、所定のシート材に複数の感圧センサを一様に配置して組み込んだシートセンサ11を敷き、そのシートセンサ11に情報処理装置3を電気的且つ光学的に接続し、この情報処理装置3において、シートセンサ11に載置予定の医療品4の種類と対応付けて、その載置予定の医療品4の複数の感圧センサによる検出パターンを予め設定して記憶し、シートセンサ11から受ける検出情報と前記記憶された情報とに基づいて、シートセンサ11に載置された医療品4の種類と数を含む載置医療品情報を作成する。
(もっと読む)
作業車両管理システム
【課題】作業車両の情報及び作業車両と周囲の人物、物品、他の車両、場所等との位置関係を示す情報を取得して解析し、接触事故や転落事故の危険度を算出することによって、作業車両のオペレータ、周囲の人物、作業車両の管理責任者等が接触事故や転落事故の危険性、接触事故や転落事故の要因等を的確に把握することができ、接触事故や転落事故の適切な防止対策を講じることができるようにする。
【解決手段】作業車両に搭載され、作業車両の情報を転送する管理装置10と、管理装置10から転送された作業車両の情報を記憶手段13に格納する管理サーバ20とを有する作業車両管理システムであって、管理装置10は、作業車両から情報を取得する情報取得部、情報の解析処理を行い、接触事故又は転落事故の危険度を算出する解析処理部、解析処理の結果を格納する一時記憶部13aを備え、一時記憶部13aに格納された解析処理の結果を管理サーバ20に転送する。
(もっと読む)
移動棚のサドル構造
【課題】 車輪部分の着脱および交換を容易に行って、棚の移動方式を容易に変更可能にするとともに、溶接を用いず容易に組立可能な移動棚のサドル構造を提供する。
【解決手段】 車輪42を備えたサドル4の上方に棚2が立設され、床面に敷設したレール3上を車輪42が転動することにより棚2がレール3に沿って可動となる移動棚のサドル構造において、サドル4は、棚2の全幅にわたってレール3に沿って配置される断面がコ字状のサドル本体41と、サドル本体41の両端部に取り付けられる車輪42と、サドル本体41のコ字状断面の内幅よりも幅が狭いコ字状断面の圧迫具45とからなり、圧迫具45と車輪42とを、サドル本体41のコ字状断面の内側に配置し、サドル本体41の外側から圧迫具45にボルト8を挿嵌して締め付けることにより、サドル本体41の側面下部が内側に撓んで車輪42の軸受部49側面に圧着する。
(もっと読む)
入出庫装置
【課題】 機械式駐輪場における入出庫口での利用者の安全性を向上させる。
【解決手段】 利用者が駐輪場における二輪車の入出庫を行う入出庫装置において、前記二輪車を入出庫するための駐車場に設けられた入出庫扉に対する進入方向を限定するための防護部を有し、前記防護部は、前記二輪車が所定領域へ進入するのを検出するための進入検出部と、前記利用者を検出する人体検出部とを所定の位置に設けることにより、上記課題を解決する。
(もっと読む)
移動棚装置及びその制御方法
【課題】移動棚間の通路が不用意に閉じることを防止すること。
【解決手段】各移動棚10のうちインターロックされていないものを移動させて所望の通路14を形成する。各移動棚10について、インバータ36の動作状態と移動棚10の実施の移動の有無状態とを比較し、インバータ36が動作停止中である状態で、移動棚10の移動が検出されると、異常動作であると判定し、全ての移動棚10の移動を停止させる。また、各移動棚10について、インバータ36の動作状態とインターロック状態とを比較し、インターロック状態であるにも拘らず、インバータ36が動作していると判定されると、全ての移動棚10の移動を停止させる。
(もっと読む)
収納棚用搬送機構およびその制御方法並びにその制御プログラム
【課題】常に稼働することができる収納棚用搬送機構およびその制御方法並びにその制御プログラムを提供する。
【解決手段】第1制御回路42は第1自走搬送機19に組み込まれる動力源に接続される。第2制御回路56は第2自走搬送機21に組み込まれる動力源に接続されると同時に、第1自走搬送機19の動力源に接続される。たとえ第1制御回路に障害が発生しても、第2制御回路56の働きで第1自走搬送機19と任意の障害物との接触は排除される。第1自走搬送機19の移動は確保される。第2自走搬送機21の移動経路から第1自走搬送機19は退去することができる。こうして第2自走搬送機21の移動経路は確保される。第2制御回路56の制御下で第2自走搬送機21は稼働し続けることができる。収納棚用搬送機構の動作は継続される。
(もっと読む)
移動棚装置の安全装置
【課題】 安全装置としての充分な機能を具備するとともに、デザイン性、視覚性、操作性、施工性にも優れた移動棚装置における安全装置を提供する。
【解決手段】 レール1に沿って複数の移動棚3が個々に移動可能に設置された移動棚装置における、隣接する移動棚3の相対的な移動により形成される作業通路の間隔を保持するための安全装置であって、隣接する一方の移動棚3の支柱6に、上部杆12と下部杆13の各基端部を、上下に間隔をおいてそれぞれ軸着し、かつこれら両杆のいずれか一方の先端部を、他の杆に、その長手方向に移動可能として枢着してなる接近阻止部材7をほぼ水平としたとき、その遊端が他方の移動棚3に当接するようにする。
(もっと読む)
電動式移動棚装置およびその安全装置
【課題】操作者の操作が楽で、尚且つ通路内状態の確認を確実ならしめた電動式移動棚装置を実現する。
【解決手段】電動力により駆動されるN(≧1)個の移動棚を有し、隣接する移動棚間等に作業用の通路を形成するとき、形成された通路の閉塞を阻止するインターロック機構を有する電動式移動棚装置の安全装置において、各通路に近接して、通路ごとの解除操作部Sa、Sb、・・が設けられたインターロック解除手段と、通路ごとに設けられ、インターロック解除手段の解除操作部を操作しようとする操作者PS2が、形成された通路の入り口側の所定の領域DMにいるか否かを検知する人検知手段SNa、SNb、・・と、インターロック機構を制御する制御手段とを有し、制御手段は、人検知手段SNbが操作者PS2を検知し、かつ、閉塞すべき通路に対応する解除操作部SbもしくはScが操作されたことを条件として、インターロックを解除する。
(もっと読む)
医材収納管理装置
【課題】医療材料の出し入れが容易かつ的確に行え而も収納状況の把握が自動で的確になされる医材収納管理装置を実現する。
【解決手段】医療材料10を並べて収納する棚90について収納箇所それぞれの前面に医材検出部材93と取出案内部材92を配設する。医療材料10は収納箱95に納めて棚上に置く。収納箱95の前面には、医療材料10の出入れで上下する医材銘板97を付設し、医材検出部材93には医材銘板97の上下を検出させる。これにより、種々のサイズや形状の医療材料を分かり易く収納して、さらには直接検出に適さないものまで的確に検出して、自動管理することができる。
(もっと読む)
不審物の納置検査および移送用装置
危険の可能性がある物体の納置検査および可能な移送のための装置において、開いて前記物体を受け入れ、次いで閉じて前記物体を手動検査するための密封環境を設けることを可能とする検査ユニット(10)であって、前記閉じられた検査ユニット(10)の前記密封環境に対して外部のユーザが前記物体を前記閉じられた検査ユニット(10)内で操作することを可能にする少なくとも1つの手袋部材を含む検査ユニット(10)と、前記検査ユニット(10)全体を受け入れ且つ前記検査ユニット(10)を収納するさらに密封された環境を設ける移送ユニット(80)と、を含み、それによって、前記検査ユニット(10)と前記移送ユニット(80)の複合体が前記物体を可能な移送のために安全に納置する装置。 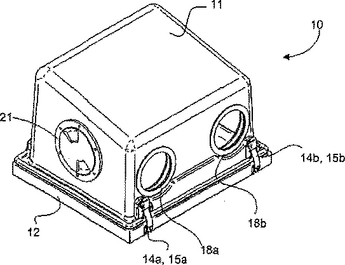 (もっと読む)
(もっと読む)
搬送車の搬送制御装置
【課題】 荷のはみ出しを無くして荷が固定設備に接触ないし衝突するのを防止し、且つ迂回ルートを経ずに直接搬送先まで走行し、また、迂回ルートを介さないことで、サイクルタイムを短縮させ、もって稼働率を向上を図り、省エネルギー化を図ること。更には、迂回ルートのスペースを不要とし、スペースの有効利用を図ること。
【解決手段】 ステーションST1からルート2を経て荷15bの搬送先のステーションST2の途中に壁、柱、制御盤等の固定設備53、54が配されている。ステーションST1で無人搬送車20が車体幅よりはみ出す荷15bを受け取った場合、前方の固定設備53の反対側にクリアランスがある場合には該クリアランス側に荷15bを移動させる。また、固定設備53を通過後、固定設備54の反対側にクリアランスがある場合には該クリアランス側に荷15bを移動させて走行する。
(もっと読む)
搬送装置、及び搬送方法
【課題】 動作の迅速化に加え省スペース化を実現できる搬送装置、及び搬送方法を提
供する。
【解決手段】 搬送装置1は、搬入出する荷物wを一時的に載置するためのステーショ
ン2と、ステーション2の近傍に敷設された軌道3と、フォーク4をステーション2へ向
けて水平方向に前進又は後退させる進退動作、及びフォーク4をステーション2に対して
上昇又は下降させる昇降動作を行うスタッカークレーン5と、荷受部6を所定の行程(ス
トローク)yで昇降させるステーションリフタ7と、操作パネルからの入出庫指令に応じ
てスタッカークレーン5及びステーションリフタ7の動作を制御する制御装置とを備える
。
(もっと読む)
搬送装置
【課題】 スタッカークレーンが動作していても、フォークが荷物に衝突しないタイミ
ングであれば、ステーションリフタを動作できる搬送装置を低コストにて提供する。
【解決手段】 搬送装置1は、搬入出する荷物wを一時的に載置するためのステーショ
ン2と、ステーション2の近傍に敷設された軌道3と、軌道3に案内されて走行しステー
ション2へ向けてフォーク4を前進又は後退させるスタッカークレーン5と、荷受部6を
所定の行程yで昇降させるステーションリフタ7と、荷受部6が行程yの上限から下降し
たことを検知する下降検知手段と、フォーキング位置を検出するフォーキング位置検知手
段と、スタッカークレーン5及びステーションリフタ7の動作を制御する制御装置とを備
える。
(もっと読む)
201 - 220 / 229
[ Back to top ]