
Fターム[3F027AA10]の内容
Fターム[3F027AA10]に分類される特許
1 - 20 / 30
リニアコンベア
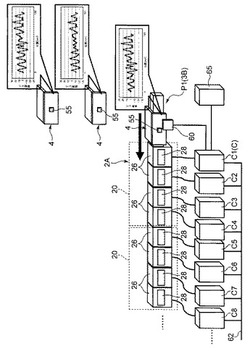
【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体

【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
搬送装置の制御方法、制御プログラム及び制御装置、並びに搬送システム
【課題】作業台車の列に過負荷が発生したときに、列のけん引を適切に停止させる。
【解決手段】生産ライン上で列をなす作業台車をけん引する場合において、列から作業台車が離脱するとき又は列に作業台車が追加されるときに、離脱又は追加後の列の総重量を算出し(ステップS12、S14及びS34、S36)、当該総重量に基づいて搬送に必要十分なけん引力を算出し(ステップS16、S38)、けん引ユニットのけん引力を、列から先頭の作業台車が離脱したタイミング又は列に新たな作業台車が追加されるタイミングで、算出した必要十分なけん引力に制御する(ステップS18、S20及びS40、S42)。
(もっと読む)
物品搬送設備
【課題】消火剤が散布された直後でも移動体を走行させることができる物品搬送設備を提供すること。
【解決手段】地上側に設けられた停止制御用の被検出体DHと、移動体1側に設けられ、被検出体の存在を検出する被検出体検出装置SH1・SH2とが設けられ、移動体制御手段27が、光式測距手段21を用いた走行制御により移動体1の走行作動を制御する第1制御状態と、被検出体検出装置SH1が移載対象の物品保持部についての被検出体DHを検出するまで移動体1を走行させて、物品保持部についての目標走行位置に一致するように、移動体1の走行作動を制御する第2制御状態とに切り換え自在に構成され、かつ、火災検知手段により物品の火災が検知されていない場合は第1制御状態を維持し、火災検知手段により物品の火災が検知されると、第2制御状態に切り換える物品搬送設備。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、物品の転倒容易度を正確に得る。
【解決手段】搬送システムは、物品Wを搬送するシステムであって、搬入コンベア3と、速度制御部45と、第2光電センサ13と、判定部49とを備えている。搬入コンベア3は、物品Wを載置して移動する。速度制御部45は、物品Wを載置して移動中の搬入コンベア3の速度を制御する。第2光電センサ13は、減速時の物品Wの挙動を検出する。判定部49は、第2光電センサ13によって検出された物品Wの挙動に基づいて転倒容易度を判定する。
(もっと読む)
搬送経路決定方法及び自動搬送システム
【課題】搬送元と搬送先との間で最適な搬送経路を設定することができる搬送経路決定方法及び自動搬送システムを提供する。
【解決手段】 自動搬送システム1は、各自動搬送設備を制御する制御盤7〜11と、管理コンピュータ12とを備えている。管理コンピュータ12は、コストテーブルが格納・記憶されたデータベース18と、各搬送設備の基本動作性能に応じた基準設備コストと各搬送設備の現在の稼動状況に応じた加重値とを乗算することで、各搬送設備の現在設備コストを算出し、コストテーブルにセットすると共に、経路No.毎に各搬送設備の現在設備コストを加算して搬送コストを算出し、コストテーブルにセットするコストテーブル更新部19と、搬送元と搬送先とが一致する複数の経路(搬送経路候補)のうち搬送コストが最も小さい搬送経路候補を搬送経路として選択する搬送経路設定部20とを有している。
(もっと読む)
無接触給電設備
【課題】本発明は、非常停止時に誘導線路のエネルギーが移動体へ伝達されることを阻止し、移動体の非常停止を実現できる無接触給電設備を提供することを目的とする。
【解決手段】誘導線路29に、この誘導線路29と所定周波数で共振する共振回路を形成する第1コンデンサ32を接続し、搬送台車13に、誘導線路29より起電力が誘導される受電コイル30と、この受電コイル30と共に誘導線路29の所定周波数で共振する共振回路を形成するコンデンサ53を設け、搬送台車13を非常停止する際に操作される非常停止スイッチ18を備え、非常停止スイッチ18が操作されると、第1コンデンサ32に第2コンデンサ33を並列に接続して誘導線路29と第1コンデンサ32からなる回路のインピーダンスを変更し、誘導線路29を流れる電流の周波数を変更する非常停止回路40を備える。
(もっと読む)
給紙無人搬送車システム
【課題】無人搬送車に搭載される載荷用テーブルに必要とされるスライドストロークを短縮し、無人搬送車のコンパクト化を実現する給紙無人搬送車システムを提供する。
【解決手段】輪転機と輪転機に対して新聞巻取紙を装着・回収する無人搬送車とを有する給紙無人搬送車システムにおいて、輪転機の給紙エリアに無人搬送車を誘導する誘導ラインが、一つの輪転機に対して複数設けられていることにより上記の課題を解決する。
(もっと読む)
物品搬送装置
【課題】グルーピングされる物品以外の圧力を受けずに、物品をグルーピングできる物品搬送装置の提供を目的とする。
【解決手段】複数列に配列され、かつ搬送方向に連続して供給されるペットボトルPBを搬送する供給部2と、供給部2で搬送されるペットボトルPBが順次移送され、所定個数のペットボトルPBの搬送方向の間隔を狭めるとともに、列と直交する方向である行方向に沿って各列のペットボトルPBを整列させるグルーピング部3とを備える。グルーピング部3は、一つのペットボトルPBを載せて搬送する、独立して速度調整が可能な複数の搬送台車LMでペットボトルPBを搬送するので、グルーピングされるペットボトルPBからの圧力さえ受けることなくペットボトルPBをグルーピングできる。
(もっと読む)
台車のモニタリングシステムとモニタリング方法
【構成】 複数の台車の位置を走行ルートのレイアウトと共にモニタに表示し、モニタ上で台車を指定し、指定された台車の出発位置と目的位置とをレイアウト上に表示する。
【効果】 台車の走行ルートが妥当かどうかを、容易に確認できる。
(もっと読む)
無人車の搬送システム
【課題】複数のシステムの走行路の一部が共用化された共用エリアを有する無人搬送システムにおいて無駄な走行指示をなくすことができる無人車の搬送システムを提供する。
【解決手段】Aシステムに連結されるとともにAシステムにおける無人車の走行路の一部とBシステムにおける無人車の走行路の一部とが共用化された共通エリアを有している。地上制御盤50は、共用エリアでの荷置き作業が終わった全ての無人車をAシステムのホームステーションに回送する。また、地上制御盤50は、共用エリアでの荷置き作業が終わった全ての無人車について、Aシステム用の無人車であるかBシステム用の無人車であるかをリセットした後に、新たにAシステム用またはBシステム用のどちらかに割付ける。
(もっと読む)
搬送装置
【課題】搬送車の走行領域内に工具等の障害物が置かれた状態で、搬送車が起動したとしても、搬送車が障害物と強く接触して、搬送車が損傷することを抑制することができる搬送装置を提供する。
【解決手段】搬送装置は、予め規定された走行領域R内を走行可能とされ、被搬送物を搬送可能な搬送台111と、走行領域内に侵入した侵入物を検知可能な接触センサ220と、接触センサ220および載置台111の駆動を制御可能な制御部500と、搬送台111を起動させる起動信号または搬送台111の駆動を停止させる停止信号を制御部に送信可能な操作部とを備え、制御部500は、停止信号T2を受信すると、搬送台111を停止させる停止処理部と、起動信号T1を受信すると起動し、接触センサ220の信号に基づいて、走行領域R内に記侵入物があると判断したときに載置台111を停止状態とし、走行領域R内に侵入物がないと判断すると、搬送台111を通常走行速度で通常走行状態とする起動処理部とを備える。
(もっと読む)
荷物検出装置及び荷物検出方法
【課題】簡単な構成で、荷大きさの検出と侵入の検出ができる荷物検出装置及び荷物検出方法を提供する。
【解決手段】
荷物検出装置は、搬送される荷物Wの大きさを検出するための装置であって、荷大きさ検出器41と、第1検出器43と、第2検出器45と、判断部67とを備えている。荷大きさ検出器41は、荷物Wが通過する領域に複数の光軸を有し、荷物Wの大きさを検出する。第1検出器43は、荷物Wの搬送方向前面が荷大きさ検出器41によって検出される第1タイミングを得る。第2検出器45は、荷物Wの搬送方向後面が荷大きさ検出器41によって検出される第2タイミングを得る。判断部67は、第1タイミングと第2タイミングの間は荷大きさ検出器41の検出結果を搬送される荷物以外の異常侵入を検出する侵入判断に用いず、それ以外は荷大きさ検出器41の検出結果を侵入判断に用いる。
(もっと読む)
物体の有無、特定位置又は通過を検出するための検出器及び検出装置
【課題】占有スペースの増大を抑制しながら、可動側の検出器と固定側との配線処理を不要としてケーブルの断線を防止するとともに、可動側の検出器用バッテリーを不要にする。
【解決手段】RFIDタグ3の半導体チップ3Aとアンテナ3Bとの接続を切り離して外部に取り出した端子3C,3Dに、検出位置に設置した常時開形のスイッチ4を接続して検出器2とし、リーダ5がアンテナ5Bを通してRFIDタグ3にコマンドメッセージを送信し、RFIDタグ3からの応答メッセージを受信することができない場合はスイッチ4がオフである非検出状態とし、RFIDタグ3からの応答メッセージを受信することができた場合はスイッチ4がオンである検出状態とする。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
搬送用制振制御システムのフィ−ドバックコントロ−ラ
【課題】搬送時に搬送物に生じる振動を防止し、かつ制御系の設計及びコントロ−ラの導出も平易な搬送用制振制御システムのフィ−ドバックコントロ−ラを提供する。
【解決手段】 フィ−ドバックコントロ−ラの形を、少なくともノッチフィルタ若しくはロ−パスフィルタを有する周波数制御要素と位置制御要素の組み合わせに限定し、そのフィ−ドバックコントロ−ラの要素の値を最適に与えるために、設計仕様を周波数仕様と時間仕様の両方で与える。
(もっと読む)
搬送装置および搬送誤差補正方法
【課題】被処理物とその被処理物の一部に所定の処理を施す1つ以上の処理部とを相対移動させる搬送装置であって、安価に搬送精度を向上できるものを提供すること。
【解決手段】定盤10を備える。定盤10上に、被処理物1が載置されるテーブル2と、処理部14を支持する構造物12とを備える。テーブル2に複数の光源6a,6bが取り付けられている。各光源6a,6bにそれぞれ対応して定盤10上に複数の光検出器8a,8bを備える。搬送部4は定盤10上でテーブル2をY方向に搬送して、テーブル2と処理部14とを相対移動させる。定盤10上でのテーブル2の搬送位置を検出する。光検出器8a,8bが出力する光の位置ずれを表す信号に基づいて、その搬送位置でのテーブル2の変位を検出する。その検出したテーブル2の変位に基づいて、処理部14を構造物12上で変位させ又は処理タイミングを変更する。
(もっと読む)
部品検出方法、部品検出装置、及び、ICハンドラ
【課題】電子部品のポケットへの載置状態を少数のセンサで検出できる部品検出方法、部品検出装置、及び、ICハンドラを提供する。
【解決手段】ICハンドラの各シャトルの供給側チェンジキット31の上面には、ICチップTを載置するポケット32と、該ポケット32をY方向に横切る2つのスリット37a,37bとが凹設されている。また、ベースの上面には、シャトルを間に挟んで相対向して投光部と受光部が備えられ、投光部から所定の断面形状の検出光43が受光部に照射される。受光部は、スリット37a,37bを通過させてICチップTの上面によって一部が遮られた検出光43に基づいて受光量を検出する。ICハンドラはポケット32にICチップTが正常に載置されているときの受光量から第1の閾値を予め求め、搬送するICチップTが一部を遮った際の受光量と、第1の閾値とを比較してICチップTの載置状態を判断する。
(もっと読む)
昇降式の物品搬送装置
【課題】搬送効率が高いものでありながら、物品の移載を適切に行うことができる昇降式の物品搬送装置を提供すること。
【解決手段】制御手段(H)が、物品移載用の適正移載高さに対応する移載装置の目標昇降位置情報を記憶するように構成されて、昇降位置検出手段(17)の検出情報及び記憶した目標昇降位置情報に基づいて、移載装置を適正移載高さに昇降させるべく、昇降駆動手段(13)の作動を制御する昇降制御処理、並びに、移載装置を適正移載高さに昇降させた後に、ビーム検出手段(BS)の検出情報に基づいて、移載装置が適正移載高さに対応して定めた許容昇降範囲内に位置するか否かを判別する停止位置確認処理を実行するように構成されている昇降式の物品搬送装置。
(もっと読む)
搬送装置
【課題】本発明は、加工ラインの変更に容易に対応が可能且つ、粉塵等の影響を受けることがない上に直線的な通信に限定されない通信手段を有し、更に外部装置によるシステム管理並びに制御を安価な構成によって可能とした搬送装置を提供することを目的とする。
【解決手段】本発明は、前記した課題を解決する手段として、固定部と固定部に配設された走行レールと、モータとコントロールボックスを搭載し、電力供給をトロリ−ユニットにて行う走行部と、走行部に取り付けられたローディング装置部と、他の装置との同調した動作を行う為の制御盤より構成し、走行部に搭載したコントロールボックスと制御盤との通信に電力線通信を用いた装置構成とし、更に制御盤と外部装置間においても電力線通信が可能な装置構成とする。
(もっと読む)
1 - 20 / 30
[ Back to top ]