
Fターム[3F072GA01]の内容
Fターム[3F072GA01]の下位に属するFターム
接触式検出(リミットスイッチ等) (4)
非接触式検出(フォトセンサー等) (41)
Fターム[3F072GA01]に分類される特許
1 - 14 / 14
物品処理装置
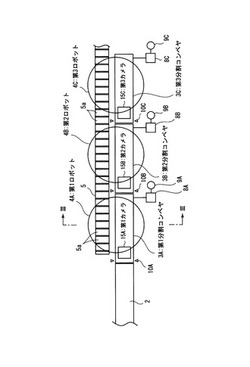
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
農作物用搬送収納装置及び収穫玉葱処理装置

【課題】コンテナを所定角度下降させる際の農作物検出部の設定間隔とは無関係に、最終的なコンテナ内での農作物の盛り付け状態を適宜に設定できる。
【解決手段】コンテナ載置部12と、コンテナ載置部12を昇降させる昇降部13と、コンテナ載置部12に載置されたコンテナ11内に農作物を送り込む送出コンベヤ14と、送出コンベヤ14の送出端14Aをコンテナ11の開口11A内で移動させるスライド機構部15と、送出コンベヤ14の送出端14Aに設けられ、コンテナ11内に堆積した農作物との間隔を検出する検出部16とを備え、検出部16は、検出部16と農作物との間隔を検出し、この検出間隔を第1の設定間隔と比較して昇降部13を作動させる第1の検出部16Aと、検出部16と農作物との間隔を検出し、この検出間隔を第2の設定間隔と比較してスライド機構部15を作動させる第2の検出部16Bを備える。
(もっと読む)
ワーク搬送装置及びワーク搬送方法
【課題】薄板状のワークの保持を非接触状態から接触状態又は接触状態から非接触状態に切替える際にワークの傾斜を防止できるワーク搬送装置及びワーク搬送方法を提供する。
【解決手段】ワーク搬送装置10は、薄板状のワーク11に向けて下降接近し、ワーク11を吸引し非接触状態で保持して移動する非接触式搬送機構15と、非接触式搬送機構15から受け取ったワーク11を真空吸引により吸着保持して移動する吸着テーブル16を備えた接触式搬送機構21と、非接触式搬送機構15から接触式搬送機構21にワーク11を受け渡す際に、吸着テーブル16の真空吸引開始及び非接触式搬送機構15の吸引停止のタイミングを制御する制御手段27とを有し、制御手段27は、非接触式搬送機構15を下降させた後に真空吸引を開始させ、ワーク11の下面と吸着テーブル16の上面との距離が受渡し距離に到達した時点で非接触式搬送機構15の吸引を停止する。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
移載装置
【課題】電子部品を所定のキャリアに貼着する場合、電子部品とキャリアの粘着シールの間に気泡が生じると、後工程で電子部品の設置高さが異なり接点の位置がずれたり、ワイヤボンディングの際の押圧で電子部品が暴れて不良品の発生が多い原因になっていた。
【解決手段】本発明ではキャリアフレームの升目状枠の下に弾性体を置くことで気泡の発生を防止し、不良品の発生率を激減することが出来る。また、スローリークする導電性のゲル素材を用いることにより、電子部品の回路に影響することなく静電気をアースすることが出来る。
(もっと読む)
搬送装置
【課題】農作物の損傷を防止しつつ、農作物を容器内に適切に収容できる搬送装置を提供する。
【解決手段】搬送装置である規格内玉葱搬送手段51は、搬送手段55と、この搬送手段55を移動させる移動駆動手段56とを備える。搬送手段55の両端部には、搬送手段55からの玉葱Tを受け入れて下り傾斜方向に向けて搬送する端部搬送手段71を回動可能に設ける。端部搬送手段71の下方には規格内コンテナを保持する載置手段75が位置する。この載置手段75を回動させる回動駆動手段82を設ける。端部搬送手段71には距離検知手段91を設け、制御手段92が距離検知手段91の検知に基づいて回動駆動手段82および移動駆動手段56を制御する。
(もっと読む)
自動設備を制御するための安全制御装置および方法
【課題】診断レポートの提供時にプロセス状態自体およびこのプロセス状態と関連するシステム状態を同時に報告する。
【解決手段】複数のセンサーからの複数の制御入力信号が供給される制御部276と、複数のプロセス診断入力信号が供給され、制御対象の設備の複数のプロセス状態のいずれが第1の規定時間に現れるかの判定の基準として前記複数のプロセス診断入力信号を解釈するように構成されたプロセス診断評価部318と、複数のシステム診断入力信号が供給され、前記安全制御装置の複数のシステム状態のいずれが第2の規定時間に現れるかの判定の基準として前記複数のシステム診断入力信号を解釈するように構成されたシステム診断評価部324と、複数の判定プロセス状態および前記複数の判定システム状態に対して複数の診断レポートを提供するように構成され、少なくとも1つの判定プロセス状態に対して、当該プロセス状態および当該複数の判定システム状態のうちの当該プロセス状態と関連する複数の関連システム状態に基づいて診断レポートが提供される診断レポート部940とを備える。
(もっと読む)
出荷トレイ装填装置
【課題】微小物体を出荷テープの装填孔に装填するための装置構成において、整列用のフィーダが別途要するなど装置全体が大がかりとなる点、及び搬送途中に微小物体の姿勢が乱れても補正できない点を解消する。
【解決手段】未整列トレイMT上方で微小物体(ワークW)の送り出し位置の直前に設けられたカメラC0と、未整列トレイMTから出荷トレイSTへ微小物体が移動するよう回転する回転テーブル2と、この回転テーブル2の回転経路途中に設けられ、カメラC0による撮像データに基づいて微小物体を整列させる補正機構(吸気装置4、補正装置5)と、を有する。
【効果】未整列トレイに微小物体を整列させて送るためのフィーダを排除することができるとと共に確実に微小物体を装填できる。
(もっと読む)
ワーク移載装置およびワーク移載方法
【課題】使用するアクチュエータ数の削減に好適なワーク移載装置を提供する。
【解決手段】ワーク搬送手段5おける昇降手段6を、走行手段4に対して走行方向に相対移動可能であり且つ弾性手段(17)により相対移動範囲の中立位置に復帰付勢するよう配置され、前記走行手段4の受取り位置Bおよび受渡し位置Cへの所定以上の接近により、搬送路に設けたストッパ10により停止されて走行手段4がストローク限に向かって前記中立位置から離れる方向に相対移動することを利用してフィンガ爪8を下降させ、走行手段4の受取り位置Bおよび受渡し位置Cからの離脱により、搬送路に設けた前記ストッパ10による相対移動状態から中立位置に復帰することを利用してフィンガ爪8を上昇させるようにした。
(もっと読む)
ワーク搬送装置
【課題】独立したアライメント装置を設けることなくワークの位置合わせができるワーク搬送装置を実現する。
【解決手段】搬送機構によってワークを保持し、この搬送機構を前記ワークの搬送方向に沿って移動させることにより前記ワークを搬送するワーク搬送装置において、
前記搬送機構は、前記ワークの保持状態を変化させるアライメント部を有することを特徴とする。
(もっと読む)
納骨箱出納装置
【課題】次の礼拝者の納骨箱が出てくるまでの待機時間を短くするとともに、納骨箱を搬送する搬送装置を有効に活用する。
【解決手段】礼拝窓4の納骨室3側に、回転軸10を中心として回転可能なターンテーブル8を備える納骨箱出納装置Aを設置する。ターンテーブル8の回転軸10から等距離離れているとともに、回転軸10から半径方向へスライド可能なトレーテーブル18を、ターンテーブル8に複数個備える。前の礼拝者が礼拝中に、次の納骨箱5を取り出して搬送し、空いているトレーテーブル18の上に載せておき、待機しておく。ターンテーブル8が回転することによってすばやく次の納骨箱5を礼拝窓4の背後に移動でき、搬送装置も待機時に自由となる。
(もっと読む)
スターホイール装置
【課題】容器16のサイズに応じてポケット18の大きさを正確に調整することができ、しかも操作性のよいスターホイール装置を提供する。
【解決手段】上下の回転円板8、10の外周に円周方向等間隔で、容器16への当接部8b、10bが形成されており、各回転円板8、10の一方の当接部8b、10bによって容器16を保持するポケット18が形成される。上下の回転円板8、10の間に調整部材20が配置され、その両端部が、連結ピン22、24によって回転円板8、10にそれぞれ連結されており、調整部材20を水平移動させると両回転円板8、10が相対回転し、ポケット18のサイズが変更される。調整部材20の移動は、直立した調整軸30の回転をベベルギヤを介して伝達して行う。調整軸30の回転は計測手段50によって計測されており、調整部材20の移動を正確に行うことができる。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
角形物品の受け渡し装置
【課題】一斗缶等の角形物品2を安定して受け渡し、液体充填後の一斗缶の場合でも液はねを抑えて位置決めできる。
【解決手段】角形物品2を収容するポケット6が形成されたスターホイール4と、このスターホイール4から角形物品2が供給される容器載置プレート22を有する回転体18と、容器載置プレート22上の角形物品2の回転方向後方側に配置された容器グリッパ26を備えている。容器グリッパ26は、上下に揺動可能であり、角形物品2が供給される時点では上方に揺動し、角形物品2が容器載置プレート22上に供給された後に係合可能な位置に移動する。容器グリッパ26が下方へ揺動する位置の下流側に当接部材60を設け、角形物品2に当接して容器グリッパ26に押し付ける。角形物品2の移動量が小さく、液はねを抑えて位置決めする。
(もっと読む)
1 - 14 / 14
[ Back to top ]