
Fターム[3F072GE07]の内容
Fターム[3F072GE07]に分類される特許
1 - 15 / 15
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
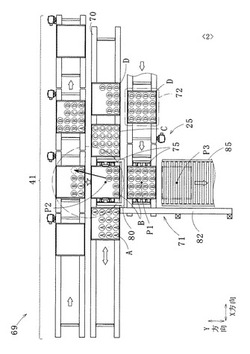
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
搬送装置

【課題】第1軸方向、第2軸方向の等速移動区間を長くでき、また、第1軸方向および第2軸方向のうち、いずれかの方向で単独で行われる加速・減速の回数を少なくする。
【解決手段】第1軸ガイド8に沿って移動するスライダー9の移動方向J1と、第2軸ガイド10に沿って移動するホルダー11の移動方向J2が、ホルダー11に取り付けられたチャック6の把持および把持解除の前後に行われる垂直方向の上下移動並びに搬送対象物を搬送元から搬送先に向かって運ぶための水平方向の搬送移動とに対し、平行ではなく、チャック6が搬送対象物を把持してから搬送先で把持解除するまでのホルダー11の移動を、第1軸駆動機構によるスライダー9のJ1方向への移動と第2軸駆動機構によるホルダー11のJ2方向への移動とを合成することによって行わせる。
(もっと読む)
果菜自動選別装置
【課題】 果菜キャリア2から果菜引受け体4への乗り継ぎの際に果菜3が転がる。
【解決手段】 仕分排出部の果菜キャリア2と果菜引受け体4との間に、果菜キャリア2から排出される果菜3を同果菜キャリア2の進行方向から20度乃至70度の範囲内の斜方向に引出して果菜引受け体4へと送り出す斜め引出しコンベア6を設ける。
(もっと読む)
ワーク供給装置およびその供給方法
【課題】ワーク供給装置およびその供給方法において、ワーク取り入れ装置からのワークの取り入れを間断なく行えるようにし生産性を低下させることがないようにする。
【解決手段】ワーク搬送回転体2を角度α毎に間欠的に回転させ、ワーク取り入れ孔3aないし他のワーク取り入れ孔にワーク4を取り入れる。ワーク取り出し装置6では、ワーク搬送回転体2を角度2α毎に間欠的に回転させることによりワーク4を取り出し、ワーク搬送回転体2にワーク4を一時的に貯留する。ワーク搬送回転体2を逆方向へ角度2α毎に間欠的に回転させることにより、貯留したワーク4をワーク取り出し装置によって取り出し、この間に、次のワークの取り入れ準備を行う。
(もっと読む)
ワーク反転装置
【課題】比較的簡単な構成で、安価で、しかも反転動作中にワークが落下するようなトラブルが確実に回避できる安全性の高いワーク反転装置を提供すること。
【解決手段】クランプ部2と、クランプ部2を回転させる回転駆動部とを有する。クランプ部2は、第1クランプ片及び第2クランプ片と、両者を連動させる連動機構部と、第1クランプ片の開閉移動に伴って開閉移動するガイド棒25とを有する。ガイド棒25は、棒状本体部と大径部251とを有する。クランプ部2の側方には、ガイドプレート4が配設されており、ガイドプレート4の配設位置は、ガイド棒25の大径部251の移動経路の途中に設定してある。ガイドプレート4には、ガイド棒25の大径部251がガイドプレート4を貫通移動可能な非干渉溝部41、42を設けてあると共に、ガイドプレート4をガイド棒25の大径部251が貫通移動することを妨げる干渉溝部43が設けられている。
(もっと読む)
ワーク方向転換装置
【課題】方向転換時のワークの飛び出しを抑え、ワーク方向転換装置の信頼性を向上させる。
【解決手段】ワーク方向転換装置1は、鉛直方向に対して回転軸Xが搬入シュート2側と反対側に第1の角度で傾斜するとともに搬出シュート4側に第2の角度で傾斜し、ワーク3を受け取るとワーク3の重さによって搬入位置から搬出位置に回転する回転テーブル8と、回転テーブル8上の支点16に揺動可能に支持され、ワーク3を受け取らない状態では回転テーブル8と平行になり、ワーク3を受け取ってワーク3が支点16を越えるとワーク3の重さにより後縁部が下がって回転テーブル8に対して第2の角度よりも小さい第3の角度で傾斜するワーク受け部9と、を備える。
(もっと読む)
容器の搬送装置
【課題】容器の搬送装置において、容器の高速搬送性を確保しながら、多品種の容器に対する対応性を向上する。
【解決手段】容器1を搬送する容器搬送コンベア10を有し、容器1の上部、特にネック部を把持するとともに、容器搬送コンベア10に同期して容器移動方向に移動するグリッパ手段30を有する容器1の搬送装置100であって、グリッパ手段30は、第1と第2のチャック板43、53の各チャック爪44、54が互いに接近して形成する把持間隔を駆動ラックの制御により容器1の上部や特にネック部のサイズに適合可能にする。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法
【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
ワーク搬送装置
【課題】 トランスファープレス等におけるワーク搬送装置において、ワーク把持装置を移動させるサーボモータの故障による運転停止の頻度を低減させるとともに、保守部品の保管・管理の負担を軽減することができる装置を提供する。
【解決手段】 所定のワーク1を把持するワーク把持部15と、ワーク把持部15にそれぞれ回転可能に接続された一対のアーム7,8と、各アーム7,8のそれぞれの他端に回転可能に接続されると共に往復直線移動する一対のスライダ4,5と、一対のスライダ4,5をそれぞれ駆動する一対の駆動部17,18と、を備えるワーク搬送装置101において、一対の駆動部17,18が、それぞれ複数のアクチュエータ31A,31B,32A,32Bにより構成される。
(もっと読む)
薬剤供給ユニット
【課題】 薬剤スティックを整列させる作業を必要とすることなく、確実に所定数だけ供給する。
【解決手段】 筒状で両端部を封止された袋内に薬剤を収容してなる薬剤スティック5が複数収納される薬剤収納容器3と、該薬剤収納容器3が着脱自在に装着され、前記薬剤スティック5を1つずつ供給する薬剤供給部4とを備える。前記薬剤供給部4を、前記薬剤スティック5を長手方向に搬送可能とする通路14を有する搬送手段10と、該搬送手段10によって搬送された薬剤スティック5を、その長手方向に直交する斜め下方に移動させる傾斜面11aを備えた薬剤供給容器11と、該薬剤供給容器11に回転駆動可能に配設され、前記傾斜面11aに従って移動した薬剤スティック5を外周部に形成した保持凹部22に保持して搬送するロータ12とを備えた構成とする。
(もっと読む)
物品の受け渡し装置
【課題】両受け渡し領域において、容器を円滑、かつ確実に受け渡すこと。
【解決手段】回転式のラベラ1の回転体3とロボット15との間に容器2を受け渡す第1受け渡し装置14を備えている。 第1受け渡し装置14は、水平面で循環走行されるタイミングベルト28と、このタイミングベルト28に等間隔で設けた保持手段を備えている。 保持手段はカム部材とカムフォロワとによって移動を案内されるようになっている。そして、各保持手段は、受け渡し領域Eで直線状に移動されてロボット15から容器2を受け取る。他方、受け渡し領域Fでは、容器2を保持した各保持手段が、回転体3の円弧状の移動軌跡に追従して移動して、回転体3側の保持手段31へ容器2を受け渡すようになっている。
(もっと読む)
物品移載装置
【課題】ホルダコンベヤのチェーンが長時間の使用により伸びた場合に、簡単な調整で対応できるようにする。
【解決手段】エンドレスチェーンに取り付けたホルダに物品を保持して搬送するホルダコンベヤから、物品を取り出して所定の載置位置に移載する物品移載装置において、ホルダコンベヤのチェーンが伸びてくると第一保持手段80の支持部材84に対する取り付け位置を変更して物品を取り出す位置を調整し、この調整により中間部での物品の載置位置がずれた分は、第二保持部材82の開閉する把持部材の開閉量によって吸収するようにしたので、長時間の伸びに対して簡単な調整で対応する。
(もっと読む)
製品集積方法および製品集積装置
【課題】高速運転可能で、確実に作動させることができる製品集積方法および製品集積装置を提供すること。
【解決手段】所定間隔で取り付けた多数の羽根部材6を備え、隣接する羽根部材6の間に製品収容部6Aが形成される無端状の回転コンベア2と、該回転コンベア2の各製品収容部6Aに1個づつ製品を供給する製品供給手段20と、N個の製品収容部6Aと少なくとも1個の空の製品収容部6Aを交互に形成する間隔形成手段30Aと、を備えた製品集積装置1を構成し、回転コンベア2および製品供給手段20を運転した状態で、間隔形成手段30Aと製品供給手段20を同期して作動させて、製品を収容したN個の製品収容部6Aと少なくとも1個の空の製品収容部6Aを交互に形成してN個単位の製品を集積して搬送できるようにした。
(もっと読む)
回転式キャッピング装置
【課題】キャッピングヘッドの交換をせずに複数種類の容器に兼用可能にするとともに、高い処理能力を維持する。
【解決手段】円周方向等間隔で配置され、容器4を支持して回転搬送する複数の容器支持手段18と、回転体46に設けられ、容器4(4A、4B)の口部4Aa、4Baにキャップ35A、35Bを装着するキャッピングヘッド34、36とを備えており、容器支持手段18と回転体46が一体的に回転する。回転体46に2種類のキャッピングヘッド34、36が設けられている。両キャッピングヘッド34、36は、それぞれ容器支持手段18と同数、等間隔で配置されている。回転体46と容器支持手段18を相対回転させると、いずれか一方のキャッピングヘッド34または36を容器4(4Aまたは4B)の口部4Aaまたは4Baに対応させることができる。
(もっと読む)
分岐設備
【課題】搬送経路幅にあまり関係なく構造を簡単にできる分岐設備を提供する。
【解決手段】搬送手段1により搬送経路2上で搬送する被搬送物Wを、搬送経路2の所定箇所の側方に設けた分岐搬送手段3に分岐させる分岐設備9である。所定箇所に、直進搬送装置11と分岐搬送装置21を、分岐搬送装置21を分岐搬送手段3側として経路幅方向において並設した。直進搬送装置11は、搬送経路2に沿った搬送面14を形成する遊転ローラ13群を定位置に配設することで構成した。分岐搬送装置21は、向き変更装置40に連動連結した回転体24と、搬送面35を形成すべく回転体24に配設したローラ31,32群と、ローラ31,32群に連動する回転駆動装置50とから構成した。直進搬送装置と分岐搬送装置とを並設した簡単な構造でありながら、搬送経路幅にあまり関係なく、また被搬送物の大小に関係なく、被搬送物の分岐搬送や直進搬送を常に安定して確実に行える。
(もっと読む)
1 - 15 / 15
[ Back to top ]