
Fターム[3F112SB04]の内容
線材用巻芯等の交換、搬送、口出し (1,564) | 線材の取扱いに係る作用効果 (40) | 切替確実、容易 (17)
Fターム[3F112SB04]に分類される特許
1 - 17 / 17
玉揚げ装置およびそれを備えた自動ワインダー
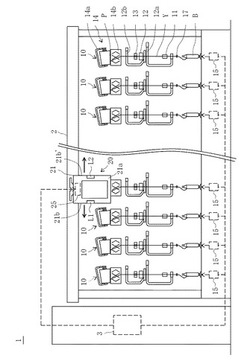
【課題】玉揚げ装置の走行状態、待機状態、異常状態といった各種動作状態を容易に把握することができる玉揚げ装置およびそれを備えた自動ワインダーを提供する。
【解決手段】複数並設された巻取ユニット10間を並設方向に走行し、巻取ユニット10に対して玉揚げ作業を行う玉揚げ装置20は、正面を覆う正面カバー21a、および両側面を覆う一対の側面カバー21b、21b’を備えた走行体フレーム21と、走行体フレーム21の正面カバー21aの両側にそれぞれ設けられた発光部L1、L2と、各発光部L1、L2の発光状態を制御する玉揚げ制御部25とを備える。玉揚げ制御部25は、当該玉揚げ装置20の走行時に、その走行方向の発光部L1またはL2を点滅させる。
(もっと読む)
糸巻取機

【課題】紡績糸を巻き取ることによって作成されたパッケージの糸端を容易に捕捉できる技術を提供する。
【解決手段】ボビンTBを回転自在に保持するボビン保持部71と、前記ボビンTBに巻き取られる紡績糸Yの連続又は不連続を検出できる糸情報検出部5と、前記ボビンTB及び該ボビンTB上に作成されたパッケージPを回転させるパッケージ駆動部73と、前記糸情報検出部5からの検出信号に基づいて前記パッケージ駆動部73を制御する制御部10と、を備える糸巻取機100であって、前記制御部10は、前記糸情報検出部5が前記紡績糸Yの不連続を検出した場合、紡績糸Yの糸端YEが所定の位置で止まるように前記ボビンTBの回転を停止させるように前記パッケージ駆動部73を制御する、とした。
(もっと読む)
糸貯留引出装置及び糸巻取装置
【課題】糸貯留部に貯留された糸の糸端を確実に引き出す。
【解決手段】給糸部から糸貯留体70に供給される糸Yと、糸貯留体70に巻き付けられた状態で貯留された糸Yとが分断されたときには、糸貯留体70に糸Yを巻き付けるための管状の巻付アーム75に給糸部側に向かう空気流を発生させることにより、糸貯留体70に巻き付いた糸端を吸引して引き出し、給糸部側の糸端との糸継を行う。巻付アーム75の先端部は、平面視での糸貯留体70の接線方向に延びている。また、糸貯留体70においては、巻付アーム75により、仮想円周Rに沿って配列された6本のローラ71の下端部と、ローラ71の間に配置されたスロープ部材74の巻付補助面74aとにまたがって糸Yが巻き付けられる。ローラ71の下端部の表面と巻付補助面74aとは、仮想円周Rに沿ってほぼ連続的に延びた面を形成しており、平面視での糸Yの巻付形状がほぼ円形となっている。
(もっと読む)
空ボビンを装着するための運動可能な移動装置を備えた、綾巻きパッケージを製造する繊維機械
【課題】綾巻きパッケージを製造する繊維機械を改良して、操作装置を所定に動かすために形成された駆動装置を操作する制御装置を、様々なボビン規格サイズに簡単に適合させることができるものを提供する。
【解決手段】交換されるべき空ボビンの規格サイズに応じたパラメータを特定するための手段が、駆動装置を所定に操作するために設けられており、手段は、操作エレメントを備えており、駆動装置は、操作エレメントによって手動で制御可能であり、操作装置32,31は、交換されるべき空ボビンに応じて手動で運動可能であり、記憶手段が設けられており、記憶手段に、操作装置32,31の、手動で運動する経路が記憶可能であり、経路は、移動装置によって空ボビン28を自動で装着するために呼出し可能である。
(もっと読む)
糸継装置およびそれを備えた糸巻取装置
【課題】上糸と下糸とをそれぞれの解撚作業位置へ正確に案内することができる糸継装置およびそれを備えた糸巻取装置を提供する。
【解決手段】撚り継ぎすべき下糸YAと上糸YBとを解撚するディスク部材33・33と、ディスク部材33・33の解撚作業位置YAW・YBWまで下糸YAと上糸YBとを案内する案内部材と、前記案内部材まで下糸YAと上糸YBとを導入する糸寄せレバーと、を具備するディスクスプライザ30であって、案内部材には、下糸YAを解撚作業位置YAWに案内する下糸案内部42Aと、上糸YBを解撚作業位置YBWに案内する上糸案内部42Bと、が形成され、糸寄せレバーには、下糸YAを下糸案内部42Aまで導く下糸位置決め部32Aと、上糸YBを上糸案内部42Bまで導く上糸位置決め部32Bと、が形成される。
(もっと読む)
線条体の巻取り方法
【課題】線条体を巻き取るボビンの切り替え時における線条体の損傷を確実に防止することができる線条体の巻取り方法を提供する。
【解決手段】第1のボビン2aと第2のボビン2bとの間に配した駆動ローラ7と押さえローラ6aとによって第1のボビン2aで巻取る線条体1の巻取り終了部分を挟持して引取ることにより、第1のボビン2aで線条体1の巻取りを終了した後、線条体1の走行を中断することなく引き続き第2のボビン2bで線条体1を巻取る方法であって、線条体1の線速Xから求めた目標回転数に対して、駆動ローラ7の回転数のずれが、Y=25000×X−1.34(%)で求められるずれ量Y以下となってから線条体1の巻取り終了部分を駆動ローラ7と押さえローラ6aとによって挟持させる。
(もっと読む)
糸巻取機及び糸案内方法
【課題】新しく供給された給糸ボビンから糸を引き出す際に、糸寄せレバーによって糸を適切にガイドすることが可能な糸巻取機を提供する。
【解決手段】自動ワインダは、ボビン支持部7と、下糸案内パイプ25と、ボビン供給装置60と、ボビン供給装置駆動モータ41と、ボビン支持部駆動モータ43と、糸端保持口66と、糸寄せレバー31と、制御部6と、を備える。ボビン支持部7は、給糸ボビン21を支持する。ボビン供給装置駆動モータ41は、ボビン供給装置60を駆動する。ボビン支持部駆動モータ43は、ボビン支持部7を駆動する。制御部6は、糸寄せレバー31の駆動を制御する。そして、糸寄せレバー31は、ボビン供給装置駆動モータ41及びボビン支持部駆動モータ43とは別に設けられた専用の駆動手段である糸寄せレバー駆動モータ42によって駆動される。
(もっと読む)
巻取ユニット及び糸巻取機
【課題】巻取作業の作業速度を向上し、かつ、パッケージPの表面と吸引口50aとの距離を、糸端の捕捉作業を行うのに適切な距離Aに維持することができる巻取ユニットを提供する。
【解決手段】巻取ユニットは、糸端の捕捉作業時に、接触部材64が、捕捉パイプ50に接触して吸引口50aとパッケージPの表面との距離を規定するように構成されている。そのため、糸端の捕捉作業時に捕捉パイプ50がパッケージPに対して旋回する速度を向上し、吸引口50aがパッケージPに衝突することを防止することができる。また、巻取ユニットは、接触部材64と捕捉パイプ50が接触する接触位置Fを、接触部材調整モータ58によって変更可能に構成されているので、パッケージPの表面と吸引口50aとの距離を、糸端の捕捉作業を行うのに適切な距離Aに維持することができる。
(もっと読む)
最内層のミドルバンチを防止できる糸巻取装置およびこれを用いた糸移動方法
【課題】トラバースローラ部およびフリクションローラ部を上昇させない状態で、糸を移動すると同時に切断でき、ケーキの最内層のミドルバンチ現象を防止できる糸巻取装置および糸移動方法を提供すること。
【解決手段】回転ドラムと、回転ドラムの上下に回転可能に設けられ、複数のボビンが装着されたボビンホルダと、上部のボビンに糸が所定トラバース幅を有し巻き取られるようにするトラバースローラ部と、糸に一定圧力を加えるフリクションローラ部とを備える糸巻取装置において、糸の経路をトラバース位置から離脱させるシフトガイドと、糸移動および切断時に糸をボビンのトランスファーテール溝にガイドするトランスファーテール形成部と、糸移動および切断時に糸の経路をボビンのトランスファーテール溝側にガイドし、糸の切断前まで糸の張力を一定に維持させるスイングガイド部とをさらに備えることを特徴とする。
(もっと読む)
自動ワインダ
【課題】自動ワインダにおいて玉揚作業を行うときに玉揚装置が糸の捕捉に失敗することを防止し、自動ワインダの生産性を向上させる。
【解決手段】自動ワインダは、ボビンセット部18と、クレードル23と、第1中継パイプ25と、自動玉揚装置98と、ディスクテンサ13のディスク対73と、を備える。クレードル23に装着された巻取ボビンには、ボビンセット部18にセットされた給糸ボビン21から解舒された糸20を巻取可能である。玉揚作業時には、第1中継パイプ25が給糸ボビン21からの糸20を捕捉し、クレードル23側へ引き出す。そして、この引き出された状態の糸20が自動玉揚装置98の糸引出アーム61(クランプ切断ヘッド65)によって捕捉される前に、前記ディスク対73が回転して当該糸20に張力を付与するように動作する。
(もっと読む)
糸条巻取機
【課題】綾振り支点ガイドへの糸掛けを容易に行うことができるようにする。
【解決手段】綾振り支点ガイド35、36が設けられた複数のガイド部材34は、長手方向に沿って延びるガイド支持部材30にスライド可能に支持されている。ガイド支持部材30は、長手方向に沿って移動可能となっている。綾振り支点ガイド35、36への糸掛けを行う際には、まず複数のボビン20とそれぞれ対向する綾振り支点位置にある複数のガイド部材34を長手方向にスライドさせて、ガイド支持部材30の手前側の一端に寄せた後、ガイド支持部材30を手前側に向かって引き出す。これにより、複数のガイド部材34を、糸条巻取機1の上方において糸条巻取機1に供給される糸Yを案内する糸ガイド4の作業者通路側とは反対側の端部と、糸条巻取機1におけるユニット本体5の作業者通路側の上端とを結ぶ仮想直線Xよりも作業者通路側の糸掛位置に位置させる。
(もっと読む)
糸条巻取機
【課題】空のボビンへの糸掛けをより確実に行うことが可能な糸条巻取機を提供すること。
【解決手段】糸条巻取機1は、回転可能なターレット11と、ターレット11に支持されるとともに、ボビン20が装着されるボビンホルダ12,13と、ターレット11を回転駆動するターレット駆動モータと、ボビン20から退避した退避位置とボビン20に糸Yを押しつける糸押圧位置とにわたって移動可能な糸掛け部材25とを備えている。そして、ボビンホルダ12,13が、ボビン20に糸Yを巻取る巻取位置P1から、巻取位置P1よりも糸道側の糸掛け位置P3へ移動した後に、糸掛け部材25が糸押圧位置へ移動して、ボビン20への糸掛けを行うように構成されている。
(もっと読む)
糸巻取装置
【課題】巻取パッケージを確実に排出する。
【解決手段】クレードル7により回転可能に支持されている巻取ボビン5の下方から搬送コンベア12の手前まで延びていると共に、搬送コンベア12に向かって下るように傾斜したガイド13が設けられている。支持解除レバーを回動させることにより、クレードル7に支持されている巻取ボビン5の支持を解除する際に、ユニットコントローラ20により、巻取ボビン5を駆動するボビン駆動モータが、巻取パッケージ6を排出方向に回転させるように制御される。
(もっと読む)
玉揚装置およびそれを備えた繊維機械
【課題】巻取管ストッカーに貯留されている巻取管をチャッカーで把持する際、その把持位置を一定にすることができる玉揚装置およびそれを備えた繊維機械を提供する。
【解決手段】チャッカーによる巻取管9の把持の際、把持される巻取管9以外の巻取管9を退避させるセパレータ69に支持されていて、かつ、セパレータ69の巻取管退避動作に従動して巻取管9の一方側端部に当接することにより、把持される巻取管9の他方側端部を巻取管ストッカー65の位置決め部材65aに押し付ける押付部材60cを備えた、巻取管位置規制手段60を含む玉揚装置6とした。
(もっと読む)
長尺材の巻取装置及びこの巻取装置を用いた長尺材の巻取方法
【課題】巻き取られた長尺材を取り外す作業を容易にするとともに、取り外し時における長尺材の損傷を防止すること。
【解決手段】巻取装置1は、台車10に回転自在に設けられた巻取部11と、この巻取部11を回転駆動する駆動モータ12と、巻取部11を拡径又は縮径させる駆動機構とを備えている。巻取部11は、巻取軸20とこの巻取軸20の外側においてその周方向に並べて配置された4枚の巻取枠21とを備えており、駆動機構は、4枚の巻取枠21を巻取軸20に対して回動させてその先端部を巻取軸20に接近させることにより、巻取部11の先端部をその基端部に対して縮径させる。
(もっと読む)
荷造ひもの連続供給方法および連続供給装置
【課題】箱状の荷物を結束するにあたって、帯状の荷造ひもを結束装置へ連続的に供給する方法および装置を提供する。
【解決手段】第1荷造ひも1aを円筒状に巻いた第1リール2aの中心軸を水平に保持するとともに回転可能に支持し、第1荷造ひも1aの内側端部に結び目を形成する一方、第1荷造ひも1aの外側端部を結び目検出器7から荷造ひも結合器8を経てピンチロール9に装入し、ピンチロール9の駆動力によって第1荷造ひも1aを結束装置へ供給しつつ、結び目検出器7が結び目を検出したときに予め荷造ひも結合器8に取付けられた第2荷造ひも1bの外側端部を第1荷造ひも1aに縛り付けて、第1荷造ひも1aの内側端部の結び目と第2荷造ひも1bの外側端部に形成された結び目とを結合させる。
(もっと読む)
自動玉揚げ動作方法
【課題】自動の玉揚げ動作の実行において、糸出し動作が失敗したにも拘わらず、糸掛け動作が継続して行なわれると、無駄に空ボビンが供給されて除去作業を作業者に強いることになる。
【解決手段】クレードルよりパッケージ付きボビンを取出す玉出し動作工程1000と、糸出し装置より糸出しを開始して、その糸を捕捉する糸出し動作工程2000と、クレードルに空のボビンを供給し、そのボビンに前記糸の糸掛けを行なって初期状態に復帰する糸掛け動作工程3000と、を備え、糸出し動作工程で糸の捕捉に失敗した場合、糸掛け動作工程3000の代わりに、モータを逆転させて糸掛け動作工程3000を経ることなく初期状態に復帰させる逆転復帰工程4000を実行する。
(もっと読む)
1 - 17 / 17
[ Back to top ]