
Fターム[3G093DB03]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711) | 駆動輪の回転数(回転速度) (236)
Fターム[3G093DB03]に分類される特許
201 - 220 / 236
自動変速機の制御装置
【課題】 自動変速機の制御装置に関し、操作者による変速操作が把握できないような状態であっても、自動変速機を適切に保護しながらある程度の走行性を確保することができるようにする。
【解決手段】 自動変速機のシフトレンジを設定する操作レバー1と、シフトレンジに応じたレンジ信号を制御信号として出力するためのインヒビタスイッチ2と、車両の走行速度を検出する車速センサ3とを備えるとともに、該制御信号に基づきインヒビタスイッチ2のフェール状態を判定するフェール判定手段11と、フェール状態時に車両の走行速度に応じてエンジンの出力トルクを抑制するエンジントルク抑制手段12とを有するエンジン制御手段10とを備える。
(もっと読む)
電動式4輪駆動制御装置

【課題】 電動機に供給する発電機の発電電力が不足することを防ぎ、電動機が目標駆動トルクを発生させることができる電動式4輪駆動制御装置を提供する。
【解決手段】 本発明の4WDコントローラ17は、エンジン5により駆動される発電機15と、発電機15の発電電力が供給されて後輪3L、3Rを駆動するモータ7と、車両の走行状態に基づいてモータ7の目標モータトルクを演算する目標モータトルク演算部27と、モータ7が目標モータトルクを発生できるように、発電機15が発生する発電電力を制御する電力制御部28と、車両の加減速に伴う発電機15の回転速度変化を予測する発電機回転速度予測部30と、を有し、この電力制御部28は、発電機回転速度予測部30により算出された予測発電機回転速度Vgrに基づいて界磁電流指令値IfFを演算することにより発電電力を制御する。
(もっと読む)
車両駆動力装置
【課題】
低加速度でスリップするような場合においてもスリップを検出することが可能な車輪のスリップ検出手段を備えた車両駆動力装置を提供することにある。
【解決手段】
微分器141は、後輪の加速度を算出する。加速度閾値算出手段144は、車両の状態に応じて、スリップ判定用加速度閾値を可変とする。加速度スリップ検出器145は、微分器141によって求められた車輪の加速度と、加速度閾値算出手段144によって可変されるスリップ判定用の加速度閾値とを比較してスリップと判定する。
(もっと読む)
車両統合制御装置
【課題】 本発明は、エンジントルクと変速段の応答性等に相違を考慮して、それぞれの最適なタイミングでの制御が可能な車両統合制御装置の提供を目的とする。
【解決手段】 駆動源とトランスミッションとの組み合わせからなるパワートレインを搭載した車両に適用される車両統合制御装置において、運転者又は自動運転装置の要求に基づいて制御目標値F1を一次的に生成し、該制御目標値F1に基づいて、該制御目標値F1と同一の物理量次元で且つ互いに値が異なる2つの制御目標値F1EGN、F1TMを中間的に生成し、該中間的に生成したそれぞれの制御目標値F1EGN、F1TMに基づいて、駆動源及びトランスミッションそれぞれの制御に見合った物理量次元又は形式の制御目標(目標エンジントルク、目標ギア段)を最終的に生成し、該最終的に生成したそれぞれの制御目標に向けて駆動源及びトランスミッションを制御する。
(もっと読む)
ハイブリッド車の制御装置
【課題】モータアシスト量の制約を考慮してエンジン及びモータを最適に制御し、過渡応答性の向上と燃費向上とを両立させる。
【解決手段】パワーユニット要求トルクTDMNDがアシスト可能最低トルクTDMINを越えて急激に増加したとき、モータアシストトルクTAMをモータトルク最大値を越えない範囲で急激に大きくし、その後、変化率制限値TDLMTが上昇するに従って小さくする。一方、エンジン指示トルクTEGは、当初、アシスト可能最低トルクTDMINによるアシスト分を差引いた指示トルクとし、その後、モータアシストトルクTAMの減少と共に、徐々にエンジン指示トルクTEGを大きくする。これにより、モータアシストトルクTAMによってエンジン特の応答遅れを補償すると共に、モータアシストを必要最小限に抑えて燃費悪化を防止することができる。
(もっと読む)
ハイドロプレーニング状態判定装置
【課題】
湿潤路を走行中に車輪と路面との接触が断たれ、ハイドロプレーニングが発生したことを正確に判定する。
【解決手段】
送信波を送信する送信機能と、前記送信機能で送信した送信波の反射波を受信する受信機能と、前記送信機能から送信する送信波を車輪の後ろの路面に送信し、送信波の路面からの反射波を前記受信機能で受信して、ハイドロプレーニングの発生状態を判定するハイドロプレーニング状態判定機能とを備えたことを特徴とするハイドロプレーニング状態判定装置。
(もっと読む)
鞍乗り型輸送機器用操縦制御装置
【課題】スロットルグリップの操作に加え、ライダの体重移動に応じて駆動力を制御することの可能な鞍乗り型車両用操縦制御装置を提供する。
【解決手段】スロットルグリップ回動トルクセンサ11及びスロットルグリップ回動トルク演算部34でスロットルグリップ回動トルク要素TH'を算出し、さらにスロットルグリップ疑似開度演算部36で積分してスロットルグリップ疑似開度要素THを算出する。また、ハンドル荷重センサ12及びハンドル荷重演算部38でハンドル荷重FFを検出するとともに、左右のステップ荷重センサ13,14と左右のステップ荷重演算部40,41で左右のステップ荷重FR,FLを検出し、さらに重心移動要素演算部42で重心移動要素Fを算出する。そして、これらの要素を考慮に入れて目標スロットル開度THtargetを決定し、PID制御によりスロットルバルブを回動させる。
(もっと読む)
エンジン制御装置
【課題】 エンジン特性が標準的な状態から変化した場合でも、バランスのとれた走行が可能なエンジン制御装置を提供する。
【解決手段】 特性マップ102は、エンジンとトルクコンバータの関連特性値を、車両に対する駆動力要求値を示すパラメータである基準スロットルTA_Sとトルクコンバータのタービン回転数NTとに応じて設定する。特性値変更部105は、エンジントルクの低下状態に対応するトルク割合TRに応じて特性マップ102により設定された関連特性値を変更する。「駆動系+車両」モデル106,108および駆動力調停部107は、目標トルク算出手段に該当し、変更後の関連特性値に基づいてトルク目標値TT_Tを算出する。エンジン制御部82は、トルク目標値TT_Tに応じてエンジンを制御する。実トルク予測部103は、駆動力要求値を示すパラメータである基準スロットルTA_Sに基づいてエンジントルク推定値TE_Aを算出する。
(もっと読む)
自動車の制御装置及び制御方法
【課題】ドライバによって異なる運転状態及び制御機能に対応し、ドライバの意図通りに自動変速機搭載車を運行するパワートレイン制御装置及び制御方法を提供することにある。
【解決手段】現在の走行状態及びドライバ操作量等を検出するための制御用センサ1と、ドライバの意図を把握するためのドライバ意図把握手段2と、複数の運転モードの中から上記把握手段で把握した運転モードを選択する運転モード選択手段3と、前記運転モード選択手段で選択されたモードに応じて複数の制御機能を選択する制御機能選択手段4と、前記制御用センサ1及び制御機能選択手段4の信号を用いて制御用アクチュエータ5の制御量を演算する制御量演算手段6とにより構成される。
(もっと読む)
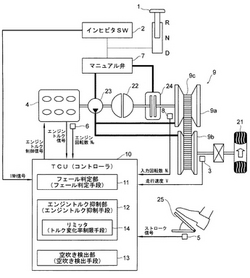
内燃機関の過給装置
【課題】電動過給機4による過給量を運転者の意思により調整できる内燃機関1の過給装置を提供する。
【解決手段】電動過給機4の作動を制御する制御装置5は、電動機2を駆動するための駆動装置8と、運転者が過給量調整手段6によって設定する過給量に応じて駆動装置8の作動を制御する制御指令部9とを備える。
過給量調整手段6は、運転者が手動操作できる操作レバーを有し、この操作レバーの位置に応じて、電動過給機4の過給量を設定できる。操作レバーは、レバー位置に応じて可変抵抗の抵抗値を変更でき、その抵抗値に応じた電気信号が制御指令部9に出力される。 これにより、運転者が操作レバーを操作して電動過給機4の過給量を調整できるので、運転者がエンジン出力を上げて運転を楽しみたい場合や、エンジン出力を下げて走行したい場合等に応じて、運転者の使用したいエンジン出力に調整することが可能となる。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】 ギヤ機構におけるガタ打ちのショックや歯打ち音の発生を抑制すると共にエネルギ効率の向上を図る。
【解決手段】 車軸にギヤ機構を介して連結された駆動軸にエンジンとモータを接続した自動車において、エンジンの停止要求がなされたとき(S120,S210)、駆動軸に要求される要求トルクTr*が閾値Tref未満であり且つ車速Vが閾値Vref未満のときには(S220,S230)、エンジンをアイドル運転する(S240)。これにより、ギヤ機構におけるガタ打ちのショックや歯打ち音の発生を抑制することができる。一方、要求トルクTr*が閾値Tref未満であっても車速Vが閾値Vref以上のときには(S220,S230)、エンジンを運転停止する(S250)。これにより、エネルギ効率の向上を図ることができる。
(もっと読む)
ハイブリッド車両制御装置及びハイブリッド車両制御方法
【課題】 前輪及び後輪の一方をエンジンで駆動し、他方をモータジェネレータで駆動するタイプのハイブリッド車両制御装置において、ステアリング操作時においても車両の挙動を乱すことなく、精度の高い走行制御を実現する。
【解決手段】 本発明のハイブリッド車両制御装置においては、ステアリングの操舵角を検出し、この操舵角が車両の挙動に影響を与える予め定める設定値以上となったときには、通常の走行制御とは別に、このステアリングの操作時について予め設定された走行制御がなされる。つまり、車両のカーブ走行時にステアリングの操舵角を考慮した制御量の補正と、走行モードの選択が行われるため、車両の挙動の乱れを防止又は抑制することができる。また、車両のカーブ走行時においても走行制御を中止せずに実行するため、精度の高い走行制御を実現することができる。
(もっと読む)
トラクション制御装置
【課題】 本発明では、エンジントラクション制御が過剰になったり、遅れたりすることを抑えることができるトラクション制御装置を提供することを目的とする。
【解決手段】 トラクション制御装置20は、全駆動輪に設けられた車輪速センサ10にて検出される複数の車輪速度の平均値と、推定車体速度算出手段21にて算出される推定車体速度との差が、所定の閾値よりも大きくなったときに、スリップしたと判定して、エンジントルクを下げるエンジントラクション制御手段22を備えるとともに、各駆動輪の各車輪速度と、推定車体速度との差が、所定値よりも大きいか否かを判定することで、スリップした車輪数を算出するスリップ車輪数算出手段23を備えている。そして、エンジントラクション制御手段22は、スリップ車輪数算出手段23で算出した車輪数が多い程、大きくエンジントルクを下げるように構成されている。
(もっと読む)
スリップ防止システム
【課題】 従来のスリップ防止システムでは、スリップが発生した場合にエンジンの出力を制御せずに、単にクラッチ等の伝達機構で車軸への駆動力を調節するものであるので、半クラッチ状態においては、エンジンのエネルギーが無駄に消費される問題がある。
また、対地速度センサを用いてスリップを判断する技術に関しては、車軸等の回転数を計測する回転数センサ以外に当該対地速度センサを設ける必要があり、しかも対地速度センサは高価であるために、作業車両の製造コストが高くなる問題がある。
【解決手段】 制御装置2は、前側左車軸11a等の車軸の回転数センサから各車軸の実回転数を検出し、他方、エンジン回転数センサ6と変速比検出センサ7とから得られる情報で各車軸の推定回転数算出し、実回転数と推定回転数との回転数差が、設定回転数以上である場合にスリップが発生したと判断する。
(もっと読む)
メータ表示装置、その方法及びハイブリッド自動車
【課題】 ハイブリッド自動車に関する複数のパラメータの変化の様子を小さな表示スペースに表示する。
【解決手段】 メータECUは、シフトポジションSPがSレンジつまりシーケンシャルシフトレンジにセットされているか否かを判定し、Sレンジにセットされていないときには、エンジンから出力されるエンジン出力パワーPeの変化の様子を表すパワーメータ92をメータ表示パネル90に表示する。一方、Sレンジにセットされていたときには、ハイブリッド用電子制御ユニットはシフトアップ操作がなされたときにあたかも実際にシフトアップされたかのごとくエンジンの回転数を一旦低くし、シフトダウン操作がなされたときにはあたかも実際にシフトダウンされたかのごとくエンジン22の回転数を一旦高くするというエンジンの回転数の演出制御を行うことから、エンジンの回転数の変化の様子を表すタコメータ94をメータ表示パネル90に表示する。
(もっと読む)
変速制御装置及び方法
【課題】 変速機の油温が低い場合に、ギヤインを確実に行うことができ、かつそのギヤイン時のギヤ鳴りを防止することができる変速制御装置及び方法を提供する。
【解決手段】 車輪側に連動する主軸33と、エンジン1及びクラッチ2側に連動する副軸32とを備えた変速機3の変速を制御する変速制御装置であって、上記変速機3の油温を検出するための温度検出手段51を備え、いずれかのギヤ段に変速するときであって、上記温度検出手段51による検出温度が所定温度以下で、変速先のギヤ段における上記副軸33側の回転速度が、ギヤインを行うために必要な目標副軸回転速度と同期しないときには、上記クラッチ2を第一の所定位置まで接側に移動させ、その後、変速先のギヤ段における上記副軸32側の回転速度が上記目標副軸回転速度と同期するようにエンジン1を制御し、上記副軸32側の回転速度が上記目標副軸回転速度と同期したときにギヤインを行うものである。
(もっと読む)
車両の制御装置
【課題】燃料供給を再開する際に実際にロックアップ解除状態になっていない状態でのトルクショックを防止する装置を提供する。
【解決手段】ロックアップ締結信号を受けたときにエンジン(1)と変速機(23)とを直結状態とし、ロックアップ解除信号を受けたときにエンジン(1)と変速機(23)とを非直結状態に戻すロックアップ機構(22)と、ロックアップ領域にあるときにロックアップ締結信号を出力し、ロックアップ領域にないときにロックアップ解除信号を出力する手段(32)とを備える車両の制御装置において、燃料供給カットの指示が出たときにエンジンへの燃料供給をカットする手段(6)と、前記燃料供給カットの指示の後に燃料供給再開の指令が出たときに目標空燃比を一時的にリッチ化する処理を行う手段(6)と、実際にロックアップ解除状態にあるか否かを判定する手段(6)と、この判定結果より実際にロックアップ解除状態にないときには前記一時的なリッチ化処理を禁止する手段(6)とを備える。
(もっと読む)
自動変速機の制御装置
【課題】 傾斜路等におけるアイドルストップ後のエンジン再始動時に、違和感のない発進が可能な自動変速機の制御装置を提供すること。
【解決手段】 アイドルストップ制御を行う自動変速機の制御装置において、駆動輪の回転数相当値を検出する回転数検出手段と、エンジン再始動直後に前記回転数検出手段により検出された回転数が上昇しているかどうかを判断し、上昇しているときは傾斜路と判断し、上昇していないときは平坦路と判断する路面傾斜判断手段と、前記複数のフェーズに応じてエンジンの入力トルクを制限するトルクダウン量をエンジン制御手段に対して出力するトルクダウン制御手段と、前記路面傾斜判断手段により傾斜路と判断されたときは、前記トルクダウン量が大きくなるように補正するトルクダウン量補正手段とを設けた。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置,動力出力装置の制御方法
【課題】 駆動軸に出力すべき駆動力をより迅速に出力する。
【解決手段】 遊星歯車機構にエンジンと第1モータと駆動軸とを接続し、駆動軸に変速機を介して第2モータを取り付けた自動車において、変速機がLoギヤの状態のときには要求パワーPe*に基づいてエンジンを間欠運転し(S170,S230)、変速機がHiギヤの状態のときにはエンジンを継続して運転する(S330)。これにより、変速機がHiギヤの状態のときに駆動軸に比較的大きな駆動力が要求されたときには、エンジンを運転停止しているものに比して要求された駆動力をより迅速に出力することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】燃料カットや効率の良い回生を行うハイブリッド車両制御装置提供。
【解決手段】ハイブリッド車制御装置で、アクセル開度又はスロットル開度を含む運動状態にて、内燃機関が駆動力を発生する必要ないか否かの制御判定手段と、スロットル開度と車速にて、自動変速機の変速段選択手段と、制御判定手段により内燃機関が駆動力を発生する必要がないと判定され、且つ変速段選択手段により選択された最終変速段が現在選択されている変速段よりも2段以上高速段であるか否かの2段アップシフト判定手段と、その手段により所定の条件を満足すると判定されたとき、現在から1段ずつ最終変速段まで順次変速制御するとともに、変速段制御に同期及び並行して、半締結状態に一定時間なるようにロックアップクラッチを制御した後に最終変速段の直前から最終変速段への変速に同期して直結状態になるようロックアップクラッチを制御する2段アップシフト制御手段。
(もっと読む)
201 - 220 / 236
[ Back to top ]