
Fターム[3H045AA03]の内容
Fターム[3H045AA03]の下位に属するFターム
斜板、斜軸形 (229)
Fターム[3H045AA03]に分類される特許
1 - 20 / 108
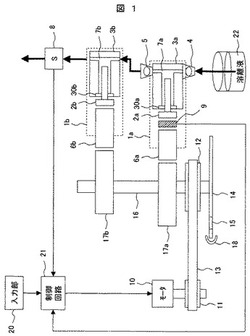
送液装置及びそれを有する分析装置
【課題】
高圧送液が可能で、且つ、一定流量での安定した送液が可能な送液装置を提供する。
【解決手段】
送液装置において、複数のポンプ室内部をそれぞれ往復運動するプランジャと、これらのプランジャを往復運動させるモータと、モータの動作を制御する制御部と、前記ポンプ室の内、溶離液吸入側のポンプ室の溶離液吸入口と溶離液吐出口にそれぞれ設けた弁と、プランジャが受ける荷重値を測定する第1のセンサと、溶離液吐出側のポンプ室から吐出した溶離液の圧力を測定する第2のセンサとを有する。
(もっと読む)
エアコンプレッサ

【課題】物理的な電源スイッチを採用しないエアコンプレッサにおいて、駆動中に電源が遮断され、その後に復旧した場合に、タンク部の圧力状態に応じて自動的にモータ部の駆動制御を行うこと。
【解決手段】本発明に係るエアコンプレッサの制御手段20は、電源電圧検出手段28により検出された電源電圧の値に基づいて電力の供給が遮断されると判断した場合に、モータ手段の駆動の有無を判断し、モータ手段が駆動中であると判断した場合には、圧力検出手段12により検出された圧力状態に基づいてモータ手段の運転休止状態を判断して当該運転休止状態に関する情報を不揮発性記録手段30に記録する。
(もっと読む)
ブースタ式気体圧縮機及びその制御方法
【課題】ブースタ式気体圧縮機において、入気圧力が規定値より低下した場合でも、吐出圧力との関係で正常運転を維持している場合は、異常と判定されないようにする。
【解決手段】加圧気体送入路4より送られてくる加圧気体を、吸入弁23を経てシリンダ3a、3b内へ吸引させ、シリンダ内で往復運動するピストン33によりさらに加圧して吐出させるようにしたブースタ式気体圧縮機の制御方法において、加圧気体がシリンダに吸引されるときの入気圧力P1と加圧気体がシリンダから吐出されるときの吐出圧力P2を検出し、該入気圧力と吐出圧力の比P2/P1、又は該入気圧力と吐出圧力の差ΔPに基づいて異常の有無を検知するようにした。さらに、前記比又は差が設定値を越えたときは、ブースタ式気体圧縮機1を異常と判定し、ブースタ式気体圧縮機1の稼動を停止させる。
(もっと読む)
圧電ポンプ、冷却装置及び電子機器
【課題】
吐出量を適切に制御可能な圧電ポンプ、冷却装置及び電子機器を提供する。
【解決手段】
環境温度が変化するなどして圧電素子37の固有振動数が変化しても、冷却装置16の気体の吐出量に応じた信号をフローセンサ140により検出し、検出した信号に応じた電圧VAに基づき、吐出量が最大となる所定の駆動周波数f0を検出し、この駆動周波数f0に駆動制御回路35Aの発振周波数を設定することで、圧電素子37の駆動電圧を制御することができるので、吐出孔33からの気体の吐出量を最大に制御することができる。駆動制御回路35Aは、フローセンサ140の信号に基づき吐出量が最大となるように可変コンデンサ79の容量を制御することができるので、圧電素子37の固有振動数に駆動周波数を制御し、吐出量を増加させることができる。
(もっと読む)
エアコンプレッサおよびモータ制御装置
【課題】モータ手段の状況に応じてPWM制御からPAM制御へと移行される条件となる電圧値を設定し、PWM制御からPAM制御へと円滑に移行させること。
【解決手段】エアコンプレッサ1は、PAM制御とPWM制御とを用いてモータ手段4の制御を行う制御手段5を備える。制御手段5は、モータ手段4の駆動開始直後に行われるPWM制御のDuty値の上昇状況に応じて、PWM制御からPAM制御へと移行される条件となる電圧値を変更する。
(もっと読む)
密閉型圧縮機
【課題】密閉型圧縮機に関し、常に安定して十分なオイルを各摺動部に供給し、摺動部の摩耗や傷付きを防止し、信頼性の高い密閉型圧縮機を提供することを目的とする。
【解決手段】オイル102を上方に汲み上げる給油機構を備えたクランクシャフト115と、円筒形の圧縮室を備えたシリンダブロックを備え、給油機構は、クランクシャフト115の外周に刻設された螺旋溝を備え、螺旋溝は、オイル102とともに汲み上げられた異物をクランクシャフト115と主軸受123との摺動部に排出することなく上部に搬送する異物排出防止手段131を備えているので、異物排出防止手段131により摩耗粉などの異物がオイルとともに集まって流れ、摩耗粉などの異物が摺動部に流れ出すのを防止することができ、摩耗粉などの異物による摺動部の摩耗や傷付きを防止し、信頼性の高い密閉型圧縮機を提供することができる。
(もっと読む)
空気圧縮機
【課題】エアフィルタを圧縮空気生成部又は駆動部から容易に取り外して清掃又は交換することができるメンテナンス性の高い空気圧縮機を提供すること。
【解決手段】圧縮空気を貯留するタンク部と、エアフィルタ27を通過して浄化された空気を圧縮して圧縮空気を生成する圧縮空気生成部と、該圧縮空気生成部を駆動するためのモータを有する駆動部とを備えた空気圧縮機において、前記エアフィルタ27を前記圧縮空気生成部(又は前記駆動部)に着脱可能に設ける。具体的には、前記圧縮空気生成部(又は前記駆動部)に前記エアフィルタ27を抜き差しするための凹部13bを形成し、前記エアフィルタ27の端部に把手27bを設け、該把手27bを前記圧縮空気生成部及び前記駆動部を覆う本体カバー7の表面に露出させる。
(もっと読む)
圧縮機の制御装置
【課題】圧縮機がロック状態になった場合に、不必要な停止時間を削減し、かつ、圧縮機モータやインバータ回路などを保護する。
【解決手段】
圧縮機モータ52を駆動制御する制御手段28は、圧縮機モータのロック状態を検出すると圧縮機モータ52を第1所定時間T1停止させた後に再起動させる第1再起動処理を行い、ロック状態以外の圧縮機の異常を検出すると圧縮機モータ52を第1所定時間T1より長い第2所定時間T2停止させた後に再起動させる第2再起動処理を行い、前記第1再起動処理を所定回数NL行った後に圧縮機モータ52のロック状態を検出すると、前記第2再起動処理を行う。
(もっと読む)
リニア圧縮装置およびその制御方法
【課題】 ピストンの位置検出器が不要で、演算処理を行うプロセッサの負担が小さく、電気ノイズの影響を受け難く、精度の高いピストン位置制御のできるコストの安いリニア圧縮装置および位置検出器を用いず、電気ノイズの影響を受け難く、演算処理を行うプロセッサの負担が小さく、精度の高い位置制御が出来るリニア圧縮装置の制御方法を提供すること。
【解決手段】 リニアモータを有するリニア圧縮機2と、リニアモータに電力を供給する電源31と、電源部3を制御する制御部4とを備えるリニア圧縮装置であって、制御部の電圧測定演算と、電流測定演算と、変位測定演算の各ステップの3つ以上の異なる位相角で測定した電圧、電流、変位から各振幅と各位相角を演算し、該演算値からリニアモータのコイルのインダクタンスと逆起電力係数を求め、リニア圧縮装置を制御する。
(もっと読む)
圧縮機の制御装置
【課題】DCモータの回転数を圧縮機の共振する回転数としないように制御し、圧縮機の信頼性を向上させることを目的とする。
【解決手段】回転数演算手段109で回転数を演算し、指令回転数の回転数と算出されたDCモータ104の回転数を比較し、回転数制御手段108でDCモータ104の回転数が指令回転数となるように制御し、DCモータ104への印加電圧が上限になると指令回転数より低い回転数を設定回転数記憶手段115に記憶された設定回転数から選択し、選択した回転数となるよう制御し、モータ電流が低下すれば指令回転数で運転することで、圧縮機114が共振回転数で回転することがなくなり冷却能力の低下を最小限とできる。
(もっと読む)
電磁式ポンプ、水処理装置
【課題】 エアを圧縮して吐出する風量可変型の電磁式ポンプにおいて、少風量運転の場合であっても、ダイアフラムの異常発生の際にオートストッパー機構を適正に作動させることができ、以って電磁式ポンプの運転適正化を図るのに有効な技術を提供する。
【解決手段】 本発明に係る電磁式ポンプ100は、振動子140を電磁石120,130を介して振動駆動する制御に関し、振動子140の振幅が予め設定された規定振幅に達したときに駆動を停止する停止制御モードと、振動子140が規定振幅を下回る第1の振幅にて振動するように駆動制御する第1の駆動制御モードと、振動子140が規定振幅を上回る第2の振幅にて振動するように駆動制御する第2の駆動制御モードを有する構成とされる。
(もっと読む)
エアコンプレッサおよびモータ駆動制御方法
【課題】 モータ手段の負荷状態に応じてモータ手段の駆動制御を行うこと。
【解決手段】 エアコンプレッサ1は、圧縮空気を生成する圧縮空気生成手段3と、圧縮空気生成手段3により生成された圧縮空気を貯留するタンク部2と、圧縮空気生成手段3を駆動させるためのモータ手段4と、モータ手段4の駆動量を制御する制御手段5とを有している。タンク部2には、タンク部2に貯留される圧縮空気の圧力状態を検出する圧力検出手段12が設けられており、制御手段5は、圧力検出手段12により検出された圧力状態に基づいてモータ手段4の駆動量を調整する。
(もっと読む)
エアコンプレッサおよびモータ駆動制御方法
【課題】 モータ手段の電流値が目標電流値以上へと上昇することを抑制し、さらに、電流値が目標電流値以下の場合には、モータ手段の回転状態を考慮したモータ手段の駆動制御を行うこと。
【解決手段】 エアコンプレッサは、圧縮空気を生成する圧縮空気生成手段と、圧縮空気生成手段により生成された圧縮空気を貯留するタンク部と、圧縮空気生成手段を駆動させるためのモータ手段と、モータ手段の駆動量を制御する制御手段5、20と、モータ手段の駆動に用いられる駆動電流値を検出する電流検出手段28とを有している。制御手段5、20は電流検出手段28によって検出された駆動電流値に基づいてモータ手段の駆動量を制御する。
(もっと読む)
ピストン型のポンプ
【課題】1個の動作部材の動作により流体が吸入・吐出される流体室の容量を変更できるポンプを提供する。
【解決手段】回転軸線W1を中心として相対回転可能に設けられた第1の部材25および第2の部材31と、第1の部材25に設けられたカム28と、第2の部材31に取り付けられた動作部材35,36と、第2の部材31に設けらた流体室とを備えた、ピストン型のポンプにおいて、流体室は、複数の分割室A,Bで構成されており、これらの複数の分割室A,Bに流体を吸入・吐出する通路17,18,19,20,81,87,204,205の接続・遮断を、各分割室A,B毎にそれぞれ制御する制御機構82,88が設けられている。
(もっと読む)
圧縮機
【課題】モータ軸動力を低減し省エネルギ効果が得られる圧縮機の提供。
【解決手段】電動モータで駆動されて圧縮流体を生成する圧縮機本体と、圧縮機本体により生成した圧縮流体を貯留するタンクと、タンク内の圧力を検出する圧力検出手段と、圧力検出手段で検出される圧力が上限値まで上昇すると圧縮機本体を駆動状態から停止状態に切り替え、圧力検出手段で検出される圧力が下限値まで低下すると圧縮機本体を停止状態から駆動状態に切り替える制御手段とを備えており、制御手段は、圧縮機本体の駆動中に圧力検出手段で検出される圧力が継続して所定時間以上、上限値より低く下限値より高い所定の圧力範囲にあるとき(S7,S15)には、圧縮機本体を停止し(S16)、その後、圧力検出手段で検出される圧力が前記圧力範囲より低い所定の再起動圧力値まで低下すると(S3)、圧縮機本体を再起動する(S6)。
(もっと読む)
混合流体供給システム
【課題】構成や操作の煩雑さを生じさせることなく、しかも複数種類の流体により混合流体を好適に生成する。
【解決手段】薬液ポンプ10A,10Bは、薬液を充填するためのポンプ室13と、該ポンプ室13の容積を可変とするベローズ仕切部材12とを有しており、ベローズ仕切部材12によるポンプ室13の容積変化に基づいて薬液タンクY1,Y2内の薬液を吸引又は吐出する。吸引配管21,22には吸引弁23,24が設けられ、吐出配管25には吐出弁26が設けられている。薬液ポンプ10A,10Bによる薬液の吸引行程では、吸引弁23,24が1つずつ開放されて混合対象の各薬液がそれぞれ吸引され、同吐出行程では、吐出弁26が開放されて混合液が吐出される。
(もっと読む)
往復動圧縮機の容量調整方法
【課題】ヘッドエンドアンローダ無しで段階的な容量調整が実現でき、かつロード切替時の切替タイミングに差異を生ずることなくロード切替可能な往復動圧縮機の容量調整方法を提供する。
【解決手段】複数段の往復動圧縮機1A,2A及び1B,2Bを備え、前記複数段の往復動圧縮機1A,2A及び1B,2Bは各段毎にシリンダを2筒、即ち5a,6a及び5b,6bを備え、前記各シリンダ5a,6a及び5b,6bはそのシリンダ毎に収容されたピストン3にて隔てられてなる2室の圧縮室HE,CEを備え、前記各圧縮室HE,CEはその圧縮室毎にロード・アンロードを切替え可能な吸込弁アンローダ7を備える往復動圧縮機の容量調整方法において、予め設定された時間に従って前記圧縮室HE,CEのロード状態・アンロード状態を切替える。
(もっと読む)
送液装置とその制御方法
【課題】カムの加工精度とカム同士の位相精度とカムに追従して往復運動する部位の加工精度による送液の不安定化を低減し、常に一定流量の送液を行うことが可能な送液装置を提供する。
【解決手段】回転軸1に固定された円板部材15に設けられたスリット16(ホームポジション)から所定角度毎にプランジャ5a、5bの接液端部の位置をリニアゲージなどの計測器具23a,23bを用いて測定し、細分した回転角度毎のプランジャ5a、5bの接液端部の位置パラメータを入力部22より入力する。CPU21は、前記位置プロファイルに基いたモータ14の回転速度制御を行う。
(もっと読む)
液体ポンプ装置の駆動方法
【課題】ポンプのサックバック工程で液垂れが生じないようにする駆動方法をさらに工夫し、不測の液垂れが皆無となるまでに改善された液体ポンプ装置の駆動方法を提供する。
【解決手段】液体用ポンプPと、吐出側弁28と、吸入側弁27とを有し、吐出側弁28を閉弁し、かつ、吸入側弁27を開弁してポンプPを吸入動作させる吸入工程aと、吐出側弁28を開弁し、かつ、吸入側弁27を閉弁してポンプPを吐出動作させる吐出工程bとを切換える液体ポンプ装置の駆動方法において、吐出工程bから吸入工程aに切換える際には、吐出工程bの終了に伴って、吐出側弁28を開弁し、かつ、吸入側弁27を閉弁してポンプPを吸入動作させる逆駆動工程cを行ってから吸入工程aに切換え、吐出工程bから逆駆動工程cに切換えるときは、吐出側弁28の開弁状態と吸入側弁27の閉弁状態とを維持しつつポンプPを吐出動作から直ちに吸入動作に切換える。
(もっと読む)
空気圧縮機
【課題】ピストンリングが使用限界磨耗量に達した場合、ピストンリングの交換が必要であることを使用者に報知することができる空気圧縮機を提供することにある。
【解決手段】
制御回路部9は、ピストンリング45a、45bが磨耗による使用限界に達した場合におけるタンク部5内の圧縮空気を基準圧力Prから許容最高圧力Pmまで圧力上昇させるために必要な圧縮部4の運転時間Tm(基準データ)を予め記憶しておく。運転監視時において、制御回路部9は、圧力センサ11によりタンク部5内の圧力Pが前記基準圧力Prから前記許容最高圧力Pmに上昇するまでの運転時間Ta(実測データ)を検出する。そして、実測データ(Ta)を上記基準データ(Tm)と比較することによって、実測データTaが基準データTmに達した場合に、警告回路部9aを制御し、視覚的あるいは聴覚的にピストンリング交換時期であること報知する。
(もっと読む)
1 - 20 / 108
[ Back to top ]