
Fターム[3J027FB32]の内容
Fターム[3J027FB32]に分類される特許
101 - 120 / 299
減速装置
【課題】大きな減速比を得つつ、出力軸の回転数、出力トルクを安定させること。
【解決手段】駆動源に連結され、駆動源の駆動により軸心回りに回転する駆動軸1と、駆動軸の軸心に対して偏心した位置で駆動軸に連結され、駆動軸の回転と共に駆動軸の軸心回りに回転する偏心軸2と、偏心軸に回転自在に設けられた第1の外歯歯車3と、所定位置に固定され、第1の外歯歯車に噛み合う第1の内歯歯車4と、偏心軸に回転自在に設けられ、第1の外歯歯車と偏心軸の軸心方向に並ぶように配置された第2の外歯歯車5と、第2の外歯歯車に噛み合う第2の内歯歯車6と、第2の内歯歯車に連結され、駆動軸と同軸心回りに回転する出力軸7と、を備え、第1の外歯歯車と第1の内歯歯車との歯数の差と、第2の外歯歯車と第2の内歯歯車との歯数の差を等しくした。
(もっと読む)
波動歯車装置

【課題】負荷容量を大幅に向上させたカップ型あるいはシルクハット型の波動歯車装置を提案すること。
【解決手段】カップ型あるいはシルクハット型の波動歯車装置1の可撓性外歯歯車3では、その楕円状に撓められた状態でのリム中立円の長軸位置における半径撓み量をdとすると、そのリム肉厚tが、波動歯車装置の減速比Rが80未満の場合には、(0.5237Ln(R)−1.32)d≦t≦(0.8728Ln(R)−2.2)dとされ、減速比Rが80以上の場合には、(1.5499Ln(R)−5.8099)d≦t≦(2.5832Ln(R)−9.6832)dとされている。また、外歯35の有効歯幅Lがピッチ円直径の21%〜30%までの範囲内の値とされている。このように設定すれば、可撓性外歯歯車の歯底疲労限強度を高めることができ、波動歯車装置1の負荷容量を向上させることができる。
(もっと読む)
油圧駆動減速装置
【課題】キャリアが一段となる3K型不思議遊星歯車減速機構を採用して軸方向の小型化を実現した油圧駆動減速装置を提供する。
【解決手段】油圧駆動減速装置10は油圧モータ部11と、油圧モータ部11と回転自在に結合した3K型不思議遊星歯車減速機構の減速機部12とで構成されている。減速機部12は、油圧モータ部11のケーシング13の外周面14に固着されたベアリング15により回転自在に取り付けられている。シャフト16は太陽歯車17と結合されている。遊星歯車19は太陽歯車17を中心として複数個配置されて、太陽歯車17とケーシング13に一体の内歯歯車部20との双方に噛み合うように配置されると共に、太陽歯車17と本体21に一体の内歯歯車23との双方に噛み合うように配置され、軸24で回転可能に保持されている。
(もっと読む)
波動歯車装置の波動発生器
【課題】波動歯車装置の波動発生器の可撓性ベアリングを改良して長寿命化を図ること。
【解決手段】波動歯車装置1の波動発生器4の可撓性ベアリング6は、外輪12、内輪11が半径方向に撓み可能な円環状の可撓性軌道輪となっている深みぞ玉軸受であり、ボール径Daは、各型番における現行品寸法に対して5〜15%大きい寸法に設定され、内輪の軌道面半径roとボール径Daの比ro/Da、および、外輪の軌道面半径riとボール径Daの比ri/Daは、共に、各型番における現行品の各比に対して、0.8〜2%小さくなるように、内外輪の軌道面半径ro、riの寸法が設定されている。ボール径と軌道面半径をこのように設定すると、可撓性ベアリング6の寿命を大幅に伸ばすことが可能である。
(もっと読む)
減速装置
【課題】主軸受の加工性が高く、ひいてはコストの低減を図ることのできる減速装置を得る。
【解決手段】出力部材(ケーシング)16と固定部材(第1、第2フランジ体)12、14との間に介在される第1、第2主軸受18、20を備えた減速装置2において、前記第1、第2主軸受18、20の転動体として、前記出力部材16の軸線O1に対して傾斜した回転軸O2、O3を有する複数の円筒ころ60A、61Aよりなる一対の円筒ころ列60、61を背面合わせで備える。第1、第2主軸受18、20の内輪64、66及び外輪68、70には前記円筒ころ60A、61Aの軸方向の移動を拘束する鍔部がなく、リテーナ74、76によって該円筒ころ60A、61Aの軸方向の移動が拘束されている。
(もっと読む)
減速装置
【課題】強い衝撃が加わって減速装置が分解して大きな部材が脱落したりするのを回避して、二次災害の発生を未然に防止する。
【解決手段】減速装置40は、外歯歯車(遊星歯車)46A〜46Cを揺動回転させる入力軸(クランク軸)42を備える。入力軸42は、1対の第1、第2アンギュラ玉軸受50、52を介して第1、第2フランジ体(キャリヤ体)54、56に両持ち支持されている。第1、第2アンギュラ玉軸受50、52は、入力軸42を支持する軸受として、約40度の接触角θ1、θ2を有し、背面合わせで組み込まれている。
(もっと読む)
ケーブル等の取り回し構造及び産業機械の回動装置
【課題】貫通孔を貫通すると共に、自身の両端が互いに相対回転する部材に固定されて使用されるようなケーブル等の損傷を、極力軽減する。
【解決手段】関節駆動装置10のホロー部H1を貫通するケーブル17の取り回し構造において、ホロー部H1を構成する部材であって該ホロー部H1の軸方向一側の端部H1Aを含む電源側部材(一側部材)86が、ベース部材(第1部材)12に固定されると共に、該関節駆動装置10のホロー部H1を構成する部材であって該ホロー部H1の軸方向他側の端部H1Bを含むモータ側部材88が、回動部材(第2部材)14に固定されている。
(もっと読む)
減速装置
【課題】簡単な構造で高減速を得ることを可能とする。
【解決手段】ハウジング3側に回転自在に取り付けられ偏心部33を備えた入力シャフト5と、偏心部33に相対回転自在に支持され同心状一体的な内外の内側遊星歯車51及び外側遊星歯車53と、外側の外側遊星歯車53が周方向部分的に内接するように噛み合う前記ハウジング3側に設けられた固定側ギヤ部11と、内側の内遊星歯車51が周方向部分的に内接するように噛み合う可動側ギヤ部13を有する出力シャフト7とを備え、同心状一体的な内外の内側遊星歯車51及び外側遊星歯車53と固定側ギヤ部11及び可動側ギヤ部13との簡単な構造により高減速を得ることを特徴とする。
(もっと読む)
ロボットハンド
【課題】把持力を弱めることなく簡単に作業時間を短縮化し、柔軟な把持動作を行う。
【解決手段】ロボットハンド1は、複数のフィンガーF1,F2と、フィンガーF1,F2にそれぞれ動力を伝達する複数の遊星歯車ユニット5,6と、を備え、遊星歯車ユニット5,6の太陽歯車9,10がモータ17に動力伝達可能に接続され、遊星歯車ユニット5の遊星腕13がフィンガーF1に動力伝達可能に接続され、遊星歯車ユニット6の遊星腕14がフィンガーF2に動力伝達可能に接続され、遊星歯車ユニット5の内歯歯車15は、フィンガーF1,F2が互いに近接/離反する方向に動力伝達しうるように、遊星歯車ユニット6の内歯歯車16に接続されている。
(もっと読む)
回転駆動装置、ロボットの関節構造及びロボットアーム
【課題】バックラッシを除去、低減するとともに組立性の向上を図り、さらに出力軸のふら付きを防止できる回転駆動装置と、この回転駆動装置を用いたロボットの関節構造及びこのロボットの関節構造を備えたロボットアームを提供する。
【解決手段】不思議遊星歯車を備える回転駆動装置であって、中空主軸周りに回転自在に設けられる第1キャリア52と、遊星歯車5を回転自在に支持する第2キャリア53と、第1キャリア52と第2キャリア53とを互いに連結するとともに第1キャリア52に対して第2キャリア53を主軸と直交する方向に移動自在に案内する連結部54と、第2キャリア53を主軸と直交する方向に付勢する付勢部55とを有するという構成を採用する。
(もっと読む)
減速装置
【課題】簡単な構造で高減速を得ることを可能とする。
【解決手段】ハウジング3側に回転自在に支持され第1、第2の偏心部45,47を備えた入力シャフトと、第1,第2の偏心部45,47に相対回転自在に支持された軸方向一対の第1,第2の遊星歯車8,9と、第1の遊星歯車8が周方向部分的に内接して噛み合う前記ハウジング3側に設けられた固定側インターナル・ギヤ部11と、第2の遊星歯車9が周方向部分的に内接して噛み合う可動側インターナル・ギヤ部13を有する出力シャフト7とを備え、第1の遊星歯車8及び固定側インターナル・ギヤ部11間の歯数差ΔZと前記第2の遊星歯車9及び可動側インターナル・ギヤ部13間の歯数差ΔZとを等しく設定したことを特徴とする。
(もっと読む)
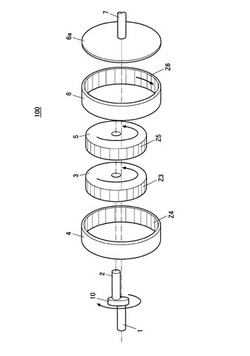
電動モータ用減速装置および減速装置付き電動モータ
【課題】高い減速比で減速することが可能な小型の減速装置を提供する。
【解決手段】減速装置100は、電動モータの回転軸208が連結され、電動モータの回転軸208の回転により回転される公転アーム101と、電動モータに固定された第1の太陽歯車102と、公転アーム101の一方の端部に回転自在に取り付けられ、第1の太陽歯車102に噛み合わされる第1の遊星歯車103と、公転アーム101の他方の端部に回転自在に取り付けられ、第1の太陽歯車102に噛み合わされる第2の遊星歯車104と、公転アーム101を間に挟み第1の遊星歯車103と互いに連結された第3遊星歯車107と、公転アーム101を間に挟み第2の遊星歯車104と互いに連結された第4遊星歯車108と、回転自在に配置され、第3および第4の遊星歯車に噛み合わされ、出力軸を有する第2の太陽歯車とを備える。
(もっと読む)
インホイールモータ駆動装置
【課題】外周係合部材を高い精度で軸線と平行に組み立てることが可能であって、しかも組み立てが容易なインホイールモータ駆動装置を提供する。
【解決手段】減速部Bは、外ピン保持部45を有する。外ピン保持部45は、軸線Oと同軸に配置される筒状部46、および筒状部46の両端から内径方向にそれぞれ突出したリング部47,48を備え、偏心部材25a,25b、曲線板26a,26b、外ピン27、および内ピン31を内部に収容する。外ピン27は、軸線方向両端部がリング部47,48にそれぞれ支持され、軸線Oと平行に延在する。そして一方のリング部48の内径が曲線板26a,26bの外径よりも大きい。
(もっと読む)
モータ付波動歯車減速装置
【課題】摺動部のがたつきを特別に小さくしたオルダムカップリングを使わずに、モータ付波動歯車減速装置の出力軸の回転角を精密に制御でき、かつ回転むらが少ないモータ付波動歯車減速装置を提供する。
【解決手段】モータ101のモータ軸102に固定するロータ2は、モータ軸に固定されロータの中心部に形成された高剛性のハブ部2b,ロータの外周部に形成された高剛性のウエイブジェネレータ2dおよびハブ部とウエイブジェネレータ2dを接続する薄肉低剛性の継手部2cから構成される。モータ101の回転に伴いウエイブジェネレータ2dに力がかかると、軽い力で薄肉の継手部2cが変形しモータ軸102,ウエイブジェネレータ2d,外歯車の半径方向の相対位置が変化するので、外歯車3cと内歯車4aの噛み込みが緩和されロータ2の回転抵抗の変動が小さくなり、出力軸の回転角を精密に制御できる。
(もっと読む)
ロボット用波動歯車減速装置
【課題】ロボットアームの駆動機構に使用される波動歯車減速装置において、可撓性外歯歯車とウエーブベアリングの可撓性外輪との間の滑りを防止する。
【解決手段】可撓性外輪12の端面に、90度の角度間隔をもって2個の係合溝18を形成する。一方、可撓性外歯歯車5の外歯歯車主部6内に、当該外歯歯車主部6の取付部7に連結される連結部21および連結部21から90度の角度間隔をもって立ち上がる2本の係合脚片22,23を有した滑り止め部材20を配設し、係合脚片22,23の先端に可撓性外輪12の係合溝18に係合可能な係合部22a,23aを形成する。係合部22a,23aは、楕円形の剛性カム15の回転により可撓性外輪12の長径部分が円周方向に移動しても、少なくとも一方が一方の係合溝に係合するように構成する。
(もっと読む)
干渉駆動関節機構
【課題】慣性力が小さく、高出力な多自由度の干渉駆動関節機構を得る。また、動力源が発生する駆動力のほとんどを出力軸の負荷を支える力として利用でき、エネルギー効率が良い干渉駆動関節機構を得る。
【解決手段】本発明は、二つの動力源の入力から二軸方向の回転量を出力する差動駆動機構を二組有し、それぞれから得られる四つの回転軸まわりの回動を干渉させ、一自由度を縮退させて、姿勢成分の三自由度を出力として得られる冗長駆動性を有した多自由度関節機構である。
(もっと読む)
減速装置
【課題】設計の自由度が高く、且つ低コストの減速装置を得る。
【解決手段】出力部材16と固定部材12、14との間に介在される主軸受18、20を備えた減速装置2において、前記主軸受18、20の転動体として、前記出力部材16の軸線O1に対して傾斜した回転軸O2、O3を有する複数の円筒ころ60A、61Aよりなる一対の円筒ころ列60、61を背面合わせで備え、且つ前記主軸受18、20の外輪を構成する部材として、転走面62Aおよび反転走面62Bの双方が前記円筒ころ列60、61の回転軸O2、O3と平行なシートメタル62、63を備える。
(もっと読む)
回転検出器付き減速装置
【課題】減速装置の出力軸回転を高精度に且つ低コストで検出する。
【解決手段】出力ブロック(出力軸)48の回転を検出する機能を備えた回転検出器付き減速装置G1において、出力ブロック(出力軸)48と平行に配置された補助回転軸58と、出力ブロック48の回転を該補助回転軸58に伝達する回転伝達手段60と、補助回転軸58の回転を検出するエンコーダ(回転検出器)62とを備え、該エンコーダ62によって補助回転軸58の回転を検出することにより、出力ブロック48の回転を検出する。
(もっと読む)
ロータリー減速機
【課題】低減速比を実現できる簡単な構成のバックラッシレス減速機を提案すること。
【解決手段】ロータリー減速機4の回転入力軸13の前端には偏心軸部16が一体形成されており、その偏心回転によって偏心板18が自転運動不可の状態で偏心量に対応する半径で公転運動を行う。偏心板18には同一円上に等角度間隔で円筒状のカムフォロワ20が取り付けられている。カムフォロワ20はテーパー状円形外周面20aを備え、ここに、回転出力軸14の後端に一体形成したトロコイドギヤ22の外歯のテーパー状歯面22aが、与圧ナット23によるスラスト力によってバックラッシレス状態で噛み合っている。セットカラー24、シム板25からなるオルダム与圧機構によって、偏心板18を支持しているオルダム機構19のガタツキが除去されている。
(もっと読む)
回転駆動装置、ロボットの関節構造及びロボットアーム
【課題】高い減速比が得られるとともに、装置の外形を省スペース化することができる回転駆動装置、この回転駆動装置を用いたロボットの関節構造及びこのロボットの関節構造を備えたロボットアームを提供する。
【解決手段】太陽歯車4と、太陽歯車4の軸O周りに公転する遊星歯車5と、駆動モータ2に配設され、太陽歯車4に連結されるとともに太陽歯車4を軸O周りに回転させるピニオン2aと、太陽歯車4の同軸上に固定配置されるとともに遊星歯車5に噛み合う固定内歯歯車6と、固定内歯歯車6とは異なる歯数に設定され、太陽歯車4の同軸上に回転可能に配置されるとともに遊星歯車5に噛み合う可動内歯歯車7と、を備え、太陽歯車4は、ピニオン2aに連結される第1歯車部41と、第1歯車部41とは異なる歯数に設定され、第1歯車部41の同軸上に配置されるとともに遊星歯車5に噛み合う第2歯車部42と、を有することを特徴とする。
(もっと読む)
101 - 120 / 299
[ Back to top ]