
Fターム[3J048AB11]の内容
防振装置 (35,941) | 振動発生の防止、検出 (1,599) | 変位の検出 (1,088) | 加速度の検出 (386)
Fターム[3J048AB11]に分類される特許
201 - 220 / 386
振動制御装置
【課題】 振動制御手段の出力を低減することができ、小型の振動制御手段で実現できると共に、常に振動制御手段の移動範囲内で制御できる振動制御装置を提供する。
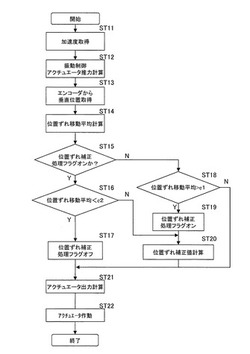
【解決手段】 設置部Fに設置された荷重支持部10と、荷重支持部10と連結され荷重と釣り合う負荷を与えるカウンタバランス部30と、荷重支持部10の設置部Fに対する振動を制御する振動制御手段21を有する振動制御部20と、荷重支持部10の加速度を検出する加速度検出手段22と、振動制御手段21の移動範囲の中心からのずれを求める位置検出手段23と、加速度検出手段22及び位置検出手段23の検出値に応じて振動制御手段21を制御することを特徴とする。
(もっと読む)
振動制御装置

【課題】 静止領域から動作領域まで円滑に作動することができる振動制御装置を提供する。
【解決手段】 設置部加速度センサ22の検出値と、荷重支持部加速度センサ23の検出値とから、荷重支持部10が静止領域か、動作領域かを判断し、荷重支持部10が静止領域の場合、設置部加速度センサ22の検出値と、荷重支持部加速度センサ23の検出値とから算出した制振アクチュエータ21の制振出力値に静止領域補償値を付加して静止領域出力値を算出し、荷重支持部10が動作領域の場合、静止領域補償値を付加した制振出力値に、動作領域補償値を付加して動作領域出力値を算出することを特徴とする。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い電磁式サスペンションシステムを提供する。
【解決手段】路面の凸所あるいは凹所を車輪が通過する際のばね下加速度Gzgに基づき、例えば、ばね下加速度Gzgが設定された大きさG0以上となった場合に(S2)、定められた規則に基づくショックアブソーバの制御(S7〜S10)に代えて、あるいは、その制御に加えて、ばね下部の動作に対する抵抗力となるアブソーバ力を、例えば、ばね下加速度Gzgに応じたアブソーバ力を発生させる制御(S13〜S16)を実行可能に構成する。ばね下加速度に基づき、ばね下部に加わる力が比較的大きくなることを早期に推定して、ばね下部の動作に対する抵抗力を発生させることで、ばね上部とばね下部との相対動作が制限されないようにすること、あるいは、ばね上部とばね下部との相対動作が制限される場合の衝撃を効果的に緩和することが可能である。
(もっと読む)
アクチュエータ
【課題】液圧式であっても車両における乗り心地を向上することが可能なアクチュエータを提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段における鉄道車両の車体Bと台車Wとの間に介装されるシリンダCとシリンダCに液圧を供給する液圧源1とを備え、車体Bを台車Wに対して傾斜させるアクチュエータAにおいて、シリンダC内の二つの圧力室R1,R2を連通するリリーフ流路14を設け、当該リリーフ流路14の途中に比例電磁式リリーフ弁15を設けた。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】 既設の上下加速度センサ等を用いて荷重の変化に対応した減衰力制御を実現できる減衰力可変ダンパの制御装置を提供する。
【解決手段】 スカイフックゲイン設定処理を開始すると、スカイフックゲイン設定部58は、図8のステップS11で、ストロークセンサ14から入力したストローク速度Ssに基づき、オブザーバ63によって車体1のばね上加速度推定値Gleを算出する。次に、スカイフックゲイン設定部58は、ステップS12でばね上加速度推定値Gleと上下Gセンサ13から入力したばね上速度加速度検出値Gldとを比較した後、ステップS13でその比較結果に基づいてダンパ6の荷重変化を推定する。しかる後、スカイフックゲイン設定部58は、図示しないマップあるいは演算式等を用いて、ダンパ6の荷重変化に応じたスカイフックゲインGshを求める。
(もっと読む)
空気圧式除振装置
【課題】
除振装置において、高精度の除振、高出力の制振等を行い、同時に空気圧制御弁の消費流量を低減する。
【解決手段】
空気圧容器111に接続され、駆動信号に基づき動作する2の空気圧制御弁121,122と、これらの空気圧制御弁に加圧空気を供給する減圧弁171,172とを備え、空気圧制御弁121,122は、減圧弁から供給される加圧空気を用い、駆動信号に基づいて得られる流量または圧力を、空気圧容器の111内部にて合成し、空気圧容器111に力を発生させる。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】 定常円旋回走行時等における乗り心地の向上を実現した減衰力可変ダンパの制御装置を提供する。
【解決手段】 ロール減衰力ベース値Drbとストローク速度Ssとが逆符号となり、ステップS12の判定がNoになると、ロール演算制御部56は、ステップS14でロール減衰力ベース値Drbが縮み側に設定されているか否かを判定する。そして、ロール演算制御部56は、ステップS14の判定がYesであれば、ステップS15でストローク速度Ssに縮み側係数K1を乗じて減衰力補正値Dcを算出し、ステップS14の判定がNoであれば、ステップS16でストローク速度Ssに伸び側係数K2を乗じて減衰力補正値Dcを算出する。減衰力補正値Dcを算出すると、ロール演算制御部56は、ステップS17で、ロール減衰力ベース値Drbから減衰力補正値Dcを減じることによりロール減衰力目標値Drを求める。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い電磁式サスペンションシステムを提供する。
【解決手段】電磁式ショックアブソーバが発生させるアブソーバ力を、少なくともばね上部の振動を減衰させるための振動減衰力として発生させる振動減衰制御において、路面勾配が変化する場所を車両が走行する場合に、設定周波数fc’より低い周波数の振動を減衰の対象から除くように構成する。路面勾配が変化する場所、例えば、坂路から平坦路となる場所,平坦路から坂路となる場所等を車両が走行する場合に、その路面勾配の変化によって車体にピッチを生じさせるような力が加わり、車体には、比較的振幅が大きく、比較的周波数の低い振動が生じることになるが、本発明のサスペンションシステムによれば、その振動に対して、アブソーバ力を発生させないようにすることが可能であり、システムへの負担を軽減することが可能である。
(もっと読む)
エンジン制振システム
【課題】エンジンのロール共振による振動を効果的に抑制することにできるエンジン制振システムを提供する。
【解決手段】エンジン制振システムは、エンジン1上に固定され、ロール共振方向の加速度を検知する1個以上の加速度センサ4a、4bと、エンジン1を支持するとともにこれを制振する複数個のACM3a、3bと、記加速度センサ4a、4bからの所定帯域における加速度信号に基づいて、前記ACM3a、3bの制振力をリアルタイムに制御する制御部11とを具え、制御部11は、ADFを用いて、車両の走行に伴って変動する前記加速度信号からロール共振以外の振動成分を除去した前処理済み信号をリアルタイムに生成する前処理部12と、この前処理済み信号、および、予め設定された固定のフィードバックフィルタマトリックスに基づいて、前記複数個のACM3a、3bのそれぞれの制振力を制御する信号をリアルタイムに算出する制御信号演算部9とを具える。
(もっと読む)
構造物と能動減衰システムとの組合せ、およびリソグラフィ装置
【課題】能動減衰システムの減衰性能が改善される構造物と能動減衰システムとの組合せを提供する。
【解決手段】構造物の少なくとも一部分の振動を減衰させるための能動減衰システムであって、構造物の位置量を求めるデバイスと、求められた位置量に依存して構造物に力を加えるアクチュエータとを含み、デバイスがアクチュエータ信号に基づいて構造物の位置量を計算する計算デバイスである、能動減衰システム。
(もっと読む)
エンジン制振システム
【課題】車両の操縦安定性を向上させるようエンジンを確実に制振することのできるエンジン制振システムを提供する。
【解決手段】エンジン制振システム10は、エンジン1上に固定され、ロール回転方向の加速度を検知する複数の加速度センサ4a、4bと、エンジンを支持するとともに制振する複数のACM3a、3bと、加速度センサからの加速度信号に基づいて前記ACMの制振力をリアルタイムに制御する制御部11とを具え、加速度センサはエンジンのドライブシャフトの軸線STに関して対称に配置され、制御部は固定のフィードバックフィルタマトリックスと対をなす加速度センサからの信号の差に基づいてACMの制御信号をリアルタイムに算出する高速演算装置を具え、フィードバックフィルタマトリックスはACMを作動させてエンジンを加振したときに対をなす加速度センサで検知された加速度信号の差を基に算出された定数で構成される。
(もっと読む)
圧力レギュレータ及び除振装置
【課題】下流側に流量変動が発生した場合においても、高応答かつ高精度に圧力制御を行うことができる圧力レギュレータを提供する。
【解決手段】圧力レギュレータ1は、サーボ弁11によって、気体供給源10から供給される気体の等温化圧力容器13への流入流量を規制し、等温化圧力容器13内の圧力を一定に保持する。ここで、サーボ弁11を操作する圧力制御手段(コンピュータ16)は、圧力計14で計測した等温化圧力容器13内の圧力をフィードバック制御する圧力制御系をメインループとし、その内側に、流量計12で計測した流入流量をフィードバック制御する流入流量制御系を構成すると共に、流入流量と圧力微分計15で計測した等温化圧力容器13内の圧力微分値とに基づいて等温化圧力容器13から流出する流出流量を推定するオブザーバを構成し、推定した流出流量を流入流量制御系にフィードバックするモデル追従制御系を構成する。
(もっと読む)
能動型振り子式ダイナミックダンパ
【目的】小型軽量で、周波数の変化する振動体の振動を制振する能動型振り子式ダイナミックダンパを提供する。
【構成】基台2上に設けたステッピングモータ3の出力軸4に中間部5bの基端を取付け、中間部5bの先端にマス5を設けて本体機構部6を構成する。ステッピングモータ3は基台2に設けた振動センサ7が検出した検出値に基づいて、制御部8が逆位相でマス5を振動するよう制御する。
マス5の振動は、R×W(Rは揺動半径,Wはマス5の質量)からなる大きな等価質量Mが出力軸4の上で上下振動することと同じになり、大きな制振エネルギーを発生して制振することができる。このときレバー比を大きくでき、しかもフリクションロスが小さいので、エネルギー収支においてエネルギー効率がよく装置を小型・軽量化する。
(もっと読む)
車両用懸架装置
【課題】本発明では、電動モータによって駆動される電磁サスペンションを備える車両用懸架装置において、運動制御モードと電力回生モードで異なる要求を、効率よく両立することができる車両用懸架装置を提供することを目的とする。
【解決手段】減速機構30は、電動モータMの出力軸に連結して、電動モータMの出力軸Maの回転を減速又は増速等してボールネジ機構50に伝達するように構成している。この減速機構30は、車両の運転状態等により減速比を自由に切替えることができるように構成している。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】 スカイフック制御時における車体制振と乗り心地の向上とを両立させた減衰力可変ダンパの制御装置を提供する。
【解決手段】 ゲインマップは、第1基準値M1と第2基準値M2とを有しており、ばね上速度Suが第2基準値M2以上である場合にはゲインGが1.0に設定される。また、ゲインGは、ばね上速度Suが第1基準値M1と第2基準値M2との間にある場合には1.0より大きな値に設定されるとともに、第1基準値M1側にそのピークを有している。更に、ゲインGは、ばね上速度Suが第1基準値M1以下である場合には1.0より小さな値(実施形態では、0.0)に設定される。
(もっと読む)
より高い剛性を提供可能な緩衝装置
マニュアル操作装置(28)の移動に対する作用に抗する緩衝装置であって、前記緩衝装置は、磁性流体を含む少なくとも一つのチャンバーと、磁性流体においてその見掛けの粘性を変えるため、可変磁界を発生する1つまたは2つの手段(6.1、6.2)と、自在に並進運動し、磁性流体をせん断可能であり、前記マニュアル操作装置(28)に機械的に連結するように設計された、一つの部品(4)と、を有し、前記可動部品(4)は、孔、および/または凹部、および/または突起を有する、長手方向軸(Y)のブレードを有する。 (もっと読む)
アクティブ除振マウント機構
【課題】制御対象である定盤と床との間の微小変位の検出を簡単に且つ低コストにて行ない得るようにして、装置全体の高価格化を効果的に抑制乃至は阻止してなるアクティブ除振マウント機構を提供すること。
【解決手段】床4の振動を絶縁する一方、定盤2の重量を支える弾性支持体6;定盤2のたわみ量に対応して復元力が変化する第一のコイルばね18と、その復元力変化を検知して制御信号として出力するロードセル20とを直列に組み合わせてなるセンサ手段8;及び床4に対する定盤2の相対的な高さ変化を補償するように上下動するようにしたものである微小変位アクチュエータ40と、微小変位アクチュエータの上下動によりたわみ量を変化させるようにしたものである第二のコイルばね38とを直列に組み合わせてなるアクティブ除振装置10を有するように、アクティブ除振マウント機構を構成した。
(もっと読む)
列車の自車位置検出装置、車体傾斜制御システム、操舵システム、アクティブ制振システム及びセミアクティブ制振システム
【課題】列車の自車位置を高精度に検出する。
【解決手段】速度発電機3と、GPS受信機2と、速度発電機3及びGPS受信機2の出力に基づいて基準位置からの走行距離と速度発電機3の出力を補正する誤差パラメータδkとを推定するカルマンフィルタ21と、速度発電機3及びカルマンフィルタ21の出力に基づいて基準位置からの走行距離を算出して列車位置を決定する自車位置決定部22とを備え、自車位置決定部22は、GPS受信機2の出力の更新時には、カルマンフィルタ21で推定された走行距離により列車位置を決定する一方、GPS受信機2の出力の更新時以外には、速度発電機3の出力の更新時に、カルマンフィルタ21で推定された走行距離のうち最新のものと、カルマンフィルタ21で推定された誤差パラメータδ{^}kのうち最新のものを用いて補正された速度発電機3の出力とに基づいて走行距離を積算して列車位置を決定する。
(もっと読む)
鉄道車両の制振装置
【課題】経年劣化によって台車が振動するような場合にあっても、車両の乗り心地を損なうことがない鉄道車両の制振装置を提供することである。
【解決手段】鉄道車両Vにおける車体Bと車体Bを支持する台車Wとの間に介装され該車両Vの進行方向に対し横方向の車体Bの振動を抑制する減衰力可変ダンパ3と、鉄道車両Vの車体Bに作用する車両進行方向に対し横方向の加速度を検出する検知手段2と、該減衰力可変ダンパ3が発生する上記車体振動を抑制する制御力Fをスカイフックセミアクティブ制御する制御手段4を備えた鉄道車両Vの制振装置1において、検知手段2で検知する加速度を解析して台車Wの横方向の振動を検出し、台車Wの振動が著大となると減衰力可変ダンパ3をパッシブダンパとして機能させるようにした。
(もっと読む)
車両用サスペンションシステム
【課題】電源の充電状態の適切化を図ることによって、電磁式アクチュエータを備えたサスペンションシステムの実用性を向上させることを課題とする。
【解決手段】アクチュエータのモータを流れる通電電流の目標である目標通電電流iUA*,iVA*,iWA*の決定において、電源からモータへ電流が供給される状況下において、目標通電電流の成分であって、モータの磁石によって生じる磁界の方向と平行な方向であるd軸方向の成分であるd軸電流成分idA*を、電源の充電状態に基づいて増大可能に構成する(S28)。モータに流れる通電電流のd軸電流成分idA*は、磁石の磁界の方向に平行であることから、モータが発生させる力、つまり、アクチュエータ力への影響は小さい。本サスペンションシステムによれば、アクチュエータ力を大きく変化させることなくモータへの供給電流を増大させて、電源の過充電を回避することが可能である。
(もっと読む)
201 - 220 / 386
[ Back to top ]