
Fターム[3J062CB28]の内容
伝動装置 (28,056) | リンク、レバー等による伝動装置の特徴 (1,496) | リンク機構の自由度 (158) | 2自由度以上 (51)
Fターム[3J062CB28]に分類される特許
1 - 20 / 51
リンク作動装置
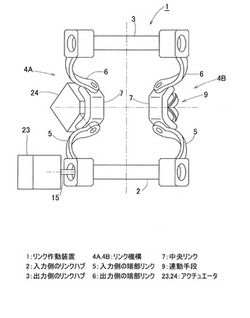
【課題】 外径寸法が小さいコンパクトな構成であり、拘束、支持、案内等をする物とリンク機構との接触を回避しやすいリンク作動装置を提供する。
【解決手段】 リンク作動装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。一組のリンク機構4Bに、入力側の端部リンク5と出力側の端部リンク6とを互いに連動して回転変位させる連動手段9を設ける。一組のリンク機構4Aに、回転対偶の回転角を任意に変更可能か、または二つのリンク機構構成部材間の相対距離を変更させる二つ以上のアクチュエータ23,24を設ける。
(もっと読む)
パラレルリンク機構、等速自在継手、およびリンク作動装置

【課題】 精密で広範な作動範囲の高速動作が可能であり、機構全体が軽量でコンパクトなパラレルリンク機構を提供する。
【解決手段】 パラレルリンク機構1は、基端側および先端側のリンクハブ2と、3組以上のリンク機構とを有する。リンク機構は、四つの回転対偶からなる三節連鎖のリンク機構であり、基端側および先端側の端部リンク部材5と中央リンク部材とでなる。リンク機構の回転対偶は、一対の対偶構成部材2,5が互いに軸受12を介して連結されており、一方の対偶構成部材5に設けられた軸部13が軸受12の内輪12aの内周に嵌合し、かつ他方の対偶構成部材2に設けられた環状内面形成部15が軸受12の外輪12bの外周に嵌合する。軸部13と環状内面形成部15とにより、軸受12の内部と外部間の潤滑剤等の出入りを規制するシール構造19,21を構築する。
(もっと読む)
リンク作動装置
【課題】 外径寸法が小さいコンパクトな構成であり、組立て易く、低コストで製作できるリンク作動装置を提供する。
【解決手段】 リンク作動装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。リンク機構4A,4Bは、それぞれのリンクハブ2,3と端部リンク5,6の各回転対偶軸O1A,O1B,O2A,O2Bが同一平面上にあって、かつ互いに交差する位置関係である。二組のリンク機構4A,4Bの少なくとも一組に、入力側の端部リンク5と出力側の端部リンク6とを互いに連動して回転変位させる連動手段9を設ける。
(もっと読む)
内燃機関の複リンク式ピストン−クランク機構
【課題】複リンク機構に特有の高次振動成分の発生を抑制する。
【解決手段】この複リンク機構は、支点31Aを中心に揺動可能に機関本体に支持されるロッカアーム31と、このロッカアーム31の一端とピストンのピストンピン34とを連結する第1リンク32と、ロッカアーム31の他端とクランクシャフト4のクランクピン5とを連結する第2リンク33と、を有する。ロッカアーム31と第2リンク33との連結点の軌跡36Aの端部36B,36C同士を結んだ直線を第1の直線46とし、ピストン上死点のときにロッカアーム31と第2リンク33との連結点36とロッカアームの支点31Aとを結ぶ直線に直交する直線を第2の直線47とすると、第1の直線46と第2の直線47とに挟まれる領域45内に、クランクシャフト4の回転中心4Aを配置する。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
無段変速機
【課題】簡易な構造で出力軸を360度回転させることが可能な無段変速機を提供する。
【解決手段】無段変速機は、少なくとも平面内で枢動可能に支持されているクランク24と、クランク24上に滑動可能に支持されている支点22と、支点22を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、を備える。駆動部は、支点22に対して枢動可能に連結された少なくとも二本のリンク部材12、14と、リンク部材の長さを伸縮させる伸縮機構とで構成される。リンク部材12、14の伸縮により支点22を移動させて、クランク24上での支点22の位置とクランク24の角度とを変えることで、クランクの回転と減速比とを制御する。
(もっと読む)
マニピュレータ及びその制御方法
【課題】減速機を使用せずに、バックドライバビリティを高めることができるマニピュレータを提案する。
【解決手段】マニピュレータ11は、第1乃至第5のリンク12乃至14並びに20及び21と、第1の可動スライダ15と、第2の可動スライダ22と、第1乃至第4の固定スライダ16及び17並びに23及び24と、第1乃至第4の駆動源8及び9並びに25及び26とを備える。第2乃至第4のリンクをスライドさせて、第1及び第2の可動スライダ15、22をスライドさせることにより、第1のリンク12を枢軸運動させて、第1のリンク12の速度を可変にして、しかもトルクを可変にする。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
往復回転機構
【課題】簡単かつ低コストで製造できる往復回転機構を提供する。
【解決手段】往復回転機構1は、モータの駆動により一方向に回転する入力軸3と、入力軸3の回転に連動して往復回転する出力軸7と、入力軸3と出力軸7の間に設けられた板バネ8よりなる伝動部材とを有している。モータを作動させるとその動力により入力軸3が回転し、それに伴って、入力軸3の先端にあるクランクアーム4とクランクピン43が一体となって旋回し続ける。この旋回動作に連動して、板バネ8が撓曲を繰り返しながら出力軸7を回転軸として揺動し、この揺動に連動して出力軸7が往復回転する。例えばこの往復回転機構を攪拌機に応用することで、往復回転式攪拌機を低コストで簡単に製造することができる。また、従来の往復回転機構で用いていた伝動アームに代えて板バネを利用することで構成部材が減るので、その分組立て工数が減り、簡単かつ低コストで製造することができる。
(もっと読む)
リンク作動装置
【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
3自由度能動回転関節
【課題】3自由度能動回転関節の小型化および軽量化を図ると共に回転アクチュエータをバランスよく配置させて、一対のリンク間の動特性を向上させる。
【解決手段】一方のリンク10aが接続される回転体20と、各出力軸101x、101y、101zが回転体20の中心に指向し相互に直交するように配置され、回転体20を回転させるX軸用、Y軸用、Z軸用の回転アクチュエータ100x、100y、100zと、各回転アクチュエータ100x、100y、100zの出力軸101x、101y、101zを回転体20に結合させる位置で支持すると共に回転体20の他の2軸まわりの回転を許容する可動体110x、110y、110zと、を備え、一方のリンク10aは回転体20に対して、各出力軸101x、101y、101zから略同距離の位置に接続されている。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
ヘキサポッド
独立した継ぎ手に装着された少なくとも5本、好ましくは6本のロッドがその上に配置された、好ましくは板状の受け器を備え、各ロッドのもう一方の端はマウンティングに接合されており、全てのマウンティングが移動路に沿って動くことができる、ヘキサポッドである。各マウンティング(8)を独立した支持部(3)に配置し、各マウンティング(8)がそれぞれの支持部(3)に沿って移動可能であるか、またはそれぞれの支持部(3)が対応のマウンティング(8)とともに移動可能であるかのいずれかであり、支持部(3)が環または環の一部であるか、あるいは二次元または三次元的な回旋状の空間形態を有し、閉じたまたは開いた移動路を規定している。 (もっと読む)
平行アームを持つロボットあるいは触覚インターフェース構造体
本発明は6自由度を有すると共にベース(2)と二つの平行なアーム(B,B')とリストジョイント(P)とを有するロボットまたは触覚インターフェース構造体に関し、アーム(B,B')はベース(2)とリストジョイント(P)との間に回動可能に設けられ、アーム(B,B')は、ショルダージョイント(3,3')とアーム(4,4')とリストジョイント(P)を支持する前腕(6,6')とを具備し、リストジョイント(P)は、それに対してハンドルホルダー(18)が第1の回転軸線(X)を中心として連結される連結セグメント(24)と、第2の回転軸線(Z)を中心としてハンドルホルダー(18)に回動可能に連結されたハンドル(16)であって、第1の軸線(X)、第2の軸線(Z)および第3の軸線(Y)を中心として回動可能なハンドル(16)とを備え、連結セグメント(24)の回転に対する少なくとも第1の回転軸線(X)を中心とするリストジョイント(16)の回転を低速化する手段が連結セグメント(24)に対して、さらにヒンジ結合されている。  (もっと読む)
(もっと読む)
6自由度パラレル機構
【課題】エンドエフェクタが、1軸周りに連続回転することができ、ベースに対して大きな姿勢角を取ることができる、6自由度パラレル機構を提供する。
【解決手段】6自由度パラレル機構の連鎖が、ベースと、ベースの中心からベースの垂直方向上方に延びるZ軸周りを回転するように、第1の回転軸受を介してベースに取り付けられたアームと、アーム上に固定されたリニアガイドと、リニアガイドの上を往復するスライダと、球面軸受を介してスライダに接続されたリンクと、リンクの球面軸受とは反対の側に取り付けられた第2の回転軸受と、を備え、6自由度パラレル機構を、ベースとエンドエフェクタとの間に、連鎖を3本並列配置して構成し、エンドエフェクタとリンクとを、第2の回転軸受によって、互いに離れた3箇所で結合する。
(もっと読む)
遊星歯車複偏心盤を用いた2気筒1クランクピン型多気筒サイクロイド往復動機関
【課題】 ハイポサイクロイド遊星歯車機構を応用した高圧,低速,ロングストローク,多気筒の往復動機関の機構に,小型軽量な構造,滑らかな動き及び機械への優れた搭載性を与える.
【解決手段】 静止内歯車と遊星歯車の歯数比が2:1のハイポサイクロイド遊星歯車機構が創成する遊星歯車の基準ピッチ円上の任意点が直線往復運動することに着目し,この機構において,V配置2気筒サイクロイド往復動機関に遊星歯車複偏心盤と1クランクピンで対応する方法を考案した.そして,この方法により,遊星歯車複偏心盤として中央遊星歯車複偏心盤を用いた多気筒往復動機関用の2気筒1クランクピン型ハイポサイクロイド遊星歯車機構の構造を考案し,それを利用して2n(nは自然数)気筒2ストローク及び4ストロークサイクロイド往復動機関の機構を構成した.
さらに,この機構のいろいろな用途への適応性を高めるため,遊星歯車複偏心盤として,端部遊星歯車複偏心盤及び割型中央遊星歯車複偏心盤を考案している.
(もっと読む)
パラレルメカニズム及びその制御方法
【課題】一般に、パラレルメカニズムは、外力に対する安定性は十分に備えているが、特異点や、ジョイントの動作範囲による制限のためにテーブルの動作角度が十分に取れないという短所がある。
【解決手段】そこで本発明では、ベースとテーブルの間に複数のリニアアクチュエータを回転ジョイントを介して並列に配置したパラレルメカニズムにおいて、リニアアクチュエータは7個以上とし、それらのリニアアクチュエータの動作を制御する制御装置に、適宜選択した6個のリニアアクチュエータのみを能動動作させると同時に、残りのリニアアクチュエータを受動動作させる制御機能を設けたパラレルメカニズムにより上述した課題を解決している。
(もっと読む)
1 - 20 / 51
[ Back to top ]