
Fターム[4C038VC09]の内容
生体の呼吸・聴力・形態・血液特性等の測定 (31,718) | 測定手段 (3,449) | 角度計 (74)
Fターム[4C038VC09]に分類される特許
21 - 40 / 74
歩行姿勢判定装置
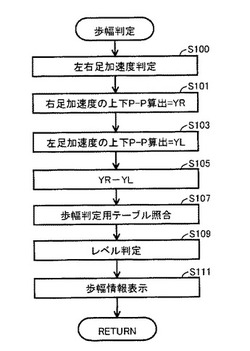
【課題】簡易にかつリアルタイムに歩行姿勢の判定を行なうことのできる歩行姿勢判定装置を提供する。
【解決手段】歩行姿勢判定装置である歩数計では、上下軸方向の加速度データに対して左右軸方向の加速度データを同期させて重ねることで、上下軸方向の、右足歩行期間の加速度および左足歩行期間の加速度を抽出する(S100)。そして、右足加速度の最大振幅YRと、左足加速度の最大振幅YLとの差分YR−YLまたは、その比率YR/YLを、歩幅を判定する際の指標値として算出する(S101〜S105)。歩数計では、予め記憶されている指標値と歩幅のレベルとの対応を参照して、算出された指標値に対応する歩幅のレベルが、被測定者の歩幅のレベルと判定される。
(もっと読む)
関節角度計測装置

【課題】従来の関節角度計測装置は、ビデオカメラによって被験者を撮影するスペースや、画像解析を行うコンピュータ等が必要となるので、設備が大がかりなものとなり、製品コストが増大している。
【解決手段】本発明による関節角度計測装置は、例えば上腕及び前腕や腰及び上腿等の関節を挟む第1及び第2部位に第1及び第2慣性センサ1,2が取付けられ、信号処理器3の信号回路34がcos−1(X1・X2+Y1・Y2+Z1・Z2)の演算を行うことで関節の曲げ角度φを算出する構成である。
(もっと読む)
膝の回動不安定性を測定する測定デバイス
本発明は、膝の回動不安定性を測定する測定デバイスに関する。本発明は、膝靭帯の状態を決定する決定デバイスであって、脛骨をそれ自体の軸線回りに回動させる力を作用させる少なくとも1つの力作用手段と、脛骨の回動角度を測定する少なくとも1つの測定手段と、前記回動を生じさせるために作用するトルクを測定する少なくとも1つの測定手段とを備えることを特徴とする、決定デバイスに関する。  (もっと読む)
(もっと読む)
歩行診断支援システム、歩行パターン生成装置、歩行パターン生成プログラム、及び歩行パターン生成方法
【課題】患者に合ったリハビリテーション、及びその効果確認をより効率良く行い、ある期間において膝疾患の治癒レベルを向上させることが可能な歩行診断支援システム、歩行パターン生成装置等を提供する。
【解決手段】歩行パターン生成装置は、人が歩行補助装置の駆動により補助されながら歩行している間に、膝関節角度センサーにより所定時間間隔で検出された膝関節の屈曲角度を示す屈曲角度データを取得し、取得された屈曲角度データに基づいて膝関節の屈曲角度の時系列的な変化を表す情報をディスプレイ上に表示すると共に、当該屈曲角度データの取得中に歩行補助装置により用いられた歩行パターンデータにより示される歩行パターンをディスプレイ上に表示する。そして、ユーザからの操作指示にしたがってディスプレイ上に表示されている歩行パターンに基づいて新たな歩行パターンを示す新たな歩行パターンデータを生成する。
(もっと読む)
視覚化の検査及び/又は訓練
被検者の視覚スキル及び/又は視覚化スキルは、本発明によるシステム及び方法を用いて、検査及び/又は訓練することができる。視覚刺激を、被検者に提示することができる。被検者に視覚刺激を与える場合と与えない場合とにおいて、例えば安定性情報、眼球運動データ、生理学的情報、その他の情報などの、被検者のパフォーマンスに関する測定を、行うことができる。同様の測定を、被検者が視覚刺激を視覚化している間に、行うことができる。収集されたデータどうしを比較して、被検者が視覚刺激を視覚化する能力を評価することができる。本プロセスの一環として、第2の刺激を被検者に与えることもできる。又は、被検者に精神活動を要求することもできる。 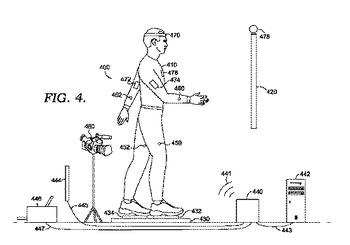 (もっと読む)
(もっと読む)
転倒防止
ユーザの転倒リスクを決定する方法が提供され、方法は、ユーザの動きの測定結果を収集するステップ、測定結果からユーザの歩行に関するパラメータに対する値を推定するステップ、及び、ユーザが通常の転倒リスクにある場合のユーザの動きから決定されるパラメータに対する通常値と推定値の比較からユーザの転倒リスクを決定するステップを有する。  (もっと読む)
(もっと読む)
携帯端末装置の移動状態を推定する方法及びシステム
【課題】ユーザの移動状態を推定するためのモデルを作成し、該モデルに基づいてユーザの移動状態を携帯端末装置を用いて自動的に推定する方法及びシステムに関する。
【解決手段】少なくとも1つのCPUとメモリとを備える携帯端末装置の移動状態を推定する方法であって、該CPUが時系列に前記メモリに格納された1又は複数のパラメータから構成される推定用特徴パラメータと1又は複数のパラメータから構成される各該代表特徴パラメータとのパラメータ毎の差に基づいて、該複数の第1クラスタから該差が第1の条件を満足する1の第1クラスタを選定するステップと、該選定された第1クラスタに対応する該第1確率表に基づいて算出された推定用セグメント確率表から、第2の条件を満足する移動状態を特定することにより移動状態を推定するステップと、からなる方法。
(もっと読む)
着地タイミング特定装置及び歩行補助装置
【課題】第1脚に装着する装具が備えられたセンサのみで、第2脚の着地タイミングを特定する着地タイミング特定装置を提供する。
【解決手段】歩行補助装置10は、反力センサ22と加速度センサ34とタイミング特定部42を備える。反力センサ22は、脚装具12を装着する第1脚の足裏に加わる接地反力を検出する。加速度センサ34は、第1脚の大腿部の鉛直方向加速度を検出する。タイミング特定部44は、検出された接地反力が予め定められた反力閾値を横切る反力タイミングと検出された加速度が予め定められた加速度閾値を横切る加速度タイミングを特定するとともに、それらのタイミングに基づいて第2脚の着地タイミングを特定する。
(もっと読む)
装着型計測装置及び歩行補助装置
【課題】ユーザの第2脚にセンサ等を取り付けることなく、第1脚に取り付けた装具のセンサから、第1脚の足の位置に対する第2脚の足の相対位置を計測する装着型計測装置を提供する。
【解決手段】装着型計測装置10は、第1脚に装着される脚装具12と、脚装具の各ジョイントの角度を検出する角度センサ21と、脚装具に固定されているカメラ42と、第1脚の足位置に対する第2脚の足の相対位置を算出するコントローラ32を備える。カメラ42は、第2脚を撮影できる配置で脚装具12に取り付けられている。コントローラ32は、角度センサが検出したジョイント角に基づいてカメラ位置に対する第1脚の足の相対位置を算出する第1演算、第2脚を撮影した画像に基づいてカメラ位置に対する第2脚の足の相対位置を算出する第2演算、第1演算と第2演算の結果に基づいて第1脚の足位置に対する第2脚の足の相対位置を算出する第3演算を実行する。
(もっと読む)
行動認識方法、装置及びプログラム
【目的】複数の抽象レベルで行動を把握することができる行動認識方法、装置及びプログラムを提供する。
【構成】複数の抽象レベル毎に、行動モデルと行動認識アルゴリズムとに対応するモデルデータを保持し、該センサデータから特徴ベクトルを抽出し、該特徴ベクトルに対して該複数の抽象レベルのうちの第1の抽象レベルに対応するモデルデータを用いた認識処理を施すことによって、当該第1の抽象レベルの行動識別子シーケンスを認識して記憶し、該複数の抽象レベル毎に、記憶されている、当該抽象レベルより下位レベルの行動識別子のシーケンスに対して、当該抽象レベルに対応するモデルデータを用いた認識処理を施すことによって、当該抽象レベルの行動識別子シーケンスを認識して記憶する。第2の抽象レベルを含む少なくとも1つ抽象レベルについて該第2認識ステップを反復する。
(もっと読む)
身体動作センシング装置
【課題】 実質的に自然な状態での身体の所定の部位の動作を検出し、それに基づいて健康上、医療的に有用で意味のある情報を得る装置を提供すること。
【解決手段】 身体運動センシング装置は、身体の所定の部位に装着されることによって、該部位の所定の方向の角速度または所定の方向の直線加速度を含む複数の運動情報を計測し、その計測結果を複数の運動情報信号として出力する運動センシングモジュールと、前記複数の運動情報信号を入力し、該運動情報信号に基づいてあらかじめ定めた複数の信号情報のうち少なくとも1つを選択して出力する指示信号選択回路手段を備え、該指示信号選択回路手段は、運動センシングモジュールが装着された身体の所定の部位、出力された運動情報の種類、運動情報について設定した強度レベル、所定時間内における運動情報の発生回数によって、前記複数の信号情報を分類して出力すること。
(もっと読む)
身体的状態検出装置、その検出方法及び検出プログラム
【課題】加速度センサの取り付け方向に依存せず、身体状態を精度よく検出できる身体状態検出装置、検出方法及び検出プログラムを提供すること。
【解決手段】身体に装着される3軸加速度センサ(1)と、3軸加速度センサから出力される加速度ベクトルデータを採取するデータ採取手段(2)と、処理手段(5)とを備え、処理手段(5)が、連続して採取された加速度ベクトルデータを用い、身体の歩行状態を検出し、歩行状態である期間内の連続する加速度ベクトルデータを用いて重力加速度ベクトル及び身体軸を決定し、連続して採取された加速度ベクトルデータに関して、各々の加速度ベクトルの絶対値、これらの絶対値の平均値、標準偏差、及び周期性を計算し、標準偏差が所定範囲内にあり、且つ周期性が所定値より大きい場合に、歩行状態と判断する。
(もっと読む)
下肢協調性評価システム
【課題】被験者の転倒リスクの評価に用いられるリスク指標を客観的に抽出することによって精度の高い測定が可能な下肢協調性評価システムを提供する。
【解決手段】人体の所定の部位に加速度測定手段を装着し、歩行中又は運動中の前記所定の部位の上下方向、左右方向、及び/又は前後方向に生じる加速度を測定する。第一算出手段を用いて測定された加速度に基づいて、加速度センサ2が装着された部位毎に上下方向、左右方向及び/又は前後方向の加速度に関連する統計量を算出する。そして、算出された加速度に関連する統計量の中から転倒リスクの評価に用いる統計量を抽出し、抽出された統計量に関連した情報をリスク指標として設定する。
(もっと読む)
歩行補助装置
【課題】ユーザの歩行中に歩行面のスロープ角を正確に検出することのできる歩行補助装置を提供する。
【解決手段】歩行補助装置は、多リンク機構を有する脚装具12R、12Lと、複数の接地センサ28と、傾斜角センサ27と、角度センサ20を備えている。複数の接地センサ28は、ユーザの足を固定する足底リンク26に前後方向に離間して取り付けられている。傾斜角センサ27は、脚装具の上端リンクである支持リンク30に取り付けられており、鉛直に対する支持リンク30の傾斜角を計測する。角度センサは、脚装具の各ジョイントの角度を検出する。この歩行補助装置10は、複数の接地センサがいずれも接地を検知していることを条件として、足底リンクの絶対傾斜角を歩行面のスロープ角として計測する。上記の条件を満足することで、歩行面と足底リンクの平行が保証される。従ってこの歩行補助装置は、歩行面のスロープ角を正確に計測することができる。
(もっと読む)
動態認識装置、動態認識システムおよび動態認識方法
【課題】認識する動態項目が増加した場合でも認識精度の低下を生じることなく、かつ計算負荷を増大させることなく動態認識を可能にする。
【解決手段】動態認識装置1は、認識すべき被験体の動態を検知する動態検知部13と、認識すべき被験体の動態項目を予め絞り込む推定処理部11と、推定処理部11により絞り込まれた動態項目に基づき、認識方法および辞書を認識方法・辞書DB21を参照することにより選択する選択処理部12と、選択処理部12により選択された認識方法と辞書を用いて動態認識を行う認識処理部14とを備える。認識処理部14は、動態検知部13で検知した情報を、推定処理部11で絞り込んだ動態項目のみについて動態認識処理を行うことを特徴とする。
(もっと読む)
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
体動バランス検出装置、体動バランス検出プログラム、体動バランス検出方法、および体動バランス診断方法
【課題】圧力センサが設置されておらずとも体動バランスを検出することができる体動測定装置1を提供する。
【解決手段】体動測定装置1に、歩行による加速度の変化を検知する加速度検知部12と、該加速度検知部12で検知した加速度信号から歩行バランスを検出する演算部14と、検出した歩行バランスに基づく出力を行う表示部13とを備えた。前記歩行バランスを検出する演算部14は、前記加速度信号から歩行一歩単位を認識して足別情報であるPPodd、PPeven、Todd、およびTevenを取得するステップS8およびステップS12と、この足別情報に基づいて歩行バランスを検出するステップS9,S13,S16とを実行する。
(もっと読む)
歩行特性評価システムおよび軌跡生成方法
【課題】 歩行が困難な患者などにおける種々の3次元歩行特性を、どこでも無拘束で長時間測定して導出することができ、医師などの診断に必要な情報を十分に提示することのできる歩行特性評価システムを提供すること。
【解決手段】 歩行特性評価システム1は、一または複数の身体装着型センサ2、携帯型データ記録装置3および解析装置4からなる。身体装着型センサ2としては足の加速度および角速度を測定可能、かつ、少なくとも足爪先装着用のセンサを備え、携帯型データ記録装置3は身体装着型センサ2によって測定されたデータを記録し、解析装置4はそのデータを演算処理して一歩ごとの足爪先の3次元軌跡を生成可能なように形成された構成である。
(もっと読む)
人体または動物体における運動特性経過を特徴付けるためのパラメータを検出するための方法および装置
【課題】人体または動物体の皮膚上に曲げセンサを固定するための固定エレメント20、曲げセンサの曲げパラメータ、例えば曲げ角度、曲げ速度および曲げ加速度を検出するための曲げ感応検知器10、検出された曲げパラメータを記憶するためのデータメモリ30を備えた、人体または動物体における動きの経過特性を特徴付けるための機能パラメータを検出するための曲げセンサをEKG長時間検査に類似して信頼できるデータが得られるようにする。
【解決手段】固定エレメントは伸張可能でありかつ検知器の測定検出器を収容するための伸張可能な中空空間を有しており、該測定検出器は中空空間において固定エレメントの参照点に固定されている。
(もっと読む)
捻れ計測装置及びそれを用いた捻れ測定方法
【課題】計測結果にバラツキが生じないようにすることが可能な捻れ計測装置及びそれを用いた捻れ計測方法を提供すること。
【解決手段】本発明の捻れ計測装置1は、軸を中心に回動可能であり、立った状態の人体を載せるための回動部1aと、回動部1aの回動角度を検出するための回動角度検出部1bと、回動部1aの回動中心を通るように、回動部1aの上面から傾動可能に略垂直に立脚し、人体が回動部1aに載った際、人体の両足に挟まれ得る垂直立脚部7とを備え、両肩が固定された状態で人体の捻れ度合いを測定することができる。
(もっと読む)
21 - 40 / 74
[ Back to top ]