
Fターム[4C040EE08]の内容
病弱者のベッド及びその関連設備 (5,709) | 駆動機構、制御 (709) | 制御 (194)
Fターム[4C040EE08]に分類される特許
1 - 20 / 194
ベッド装置
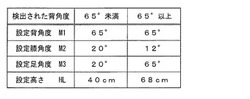
電動ベッドおよび身体ずり落ち防止制御方法
【課題】チェアポジションを取っても簡単な制御で患者のずり落ちを確実に防止できる電動ベッドおよび身体ずり落ち防止制御方法を提供する。
【解決手段】利用者は、操作部110を用いてチェアポジションボタンを押下する。角度検出部130は、背角度α、膝角度β、足角度γを検出する(ステップS12)。検出された背角度αから、身体のずり落ちを防止できる設定膝角度M2を設定テーブル122から求める。制御部140は、検出した膝角度βが設定膝角度M2でなければ、膝ボトムを設定膝角度M2にする。それからチェアポジションの設定位置に各部を移動させる。
(もっと読む)
ベッド搬送補助装置およびベッド

【課題】走行台車がベッドに対して安定良く取付けられ得るベッド搬送補助装置を提供する。
【解決手段】ベッド搬送補助装置1は、操作されることで操作信号を送信する操作機2と、操作信号を受信して操作信号に基づいて走行する走行台車3を有する。走行台車3には、ベッド30に係止しかつベッド30に上方の力を付与する上方力付与部材20およびベッド30に係止しかつベッド30に下方の力を付与する下方力付与部材21が設けられる。
(もっと読む)
ベッド装置に用いられる床板装置及び床板の駆動制御方法
【課題】任意の角度で起上した背床部と第1の脚床部を容易な制御で初期状態に戻すことができるようにしたこと。
【解決手段】リモートコントローラの操作によって背床部を起伏駆動する第1の駆動源と脚床部を起伏駆動する第2の駆動源を制御する制御装置を具備し、制御装置は、背床部と脚床部とを所定の割合で連動させて起伏動作させる基本パターンと、背床部と脚床部とが途中の角度に起上した状態から上記背床部を上昇限の角度まで起上させる第1のパターンと、背床部と脚床部とが起上した状態から背床部を下降限の角度まで倒伏させる第2のパターンを有し、第1のパターンと第2のパターンは、基本パターンからずれた状態にある背床部と脚床部とを、基本パターンの所定の割合に基いて連動させて起伏動作させた後、基本パターンの初期状態に戻っていない背床部と脚床部を初期状態に戻すよう駆動するようになっている。
(もっと読む)
移乗ロボット制御装置
【課題】専用の検出器を使用することなく移乗ロボットを安全な姿勢に移動し停止させる。
【解決手段】移乗ロボット制御装置は、使用者を持ち上げる移乗ロボットアームと、移乗ロボットアームを駆動するモータと、モータのモータトルクを移乗ロボットアームに伝達する減速機と、使用者を持ち上げたまま水平移動する車輪と、を有する移乗ロボット移動装置を制御する。移乗ロボット制御装置は、減速機に起因するアーム角度の周波数成分であるアーム角度減速機周波数成分と、減速機に起因するトルク指令の周波数成分であるトルク指令減速機周波数成分と、に基づいて使用者が移乗ロボットの設計時に想定していない姿勢で使用している場合に、移乗ロボットアームを安全に制御する安全制御器、を備える。
(もっと読む)
手動ベッド
【課題】従来の手動ベッドでは、クランクハンドルやアクチュエータの設置位置を含め、設計の自由度が低いので、本発明では、この自由度を広げることを目的としている。
【解決手段】本発明の手動ベッドでは、床部19の昇降や起伏動作を回転−直動変換機構を有するアクチュエータ9を用いて行うベッドにおいて、前記アクチュエータの回転−直動変換機構の回転側を、直流電動機と減速機構により構成し、直流電動機への給電を、クランクハンドル7で駆動する手動発電装置1により行う構成としている。手動発電装置は、可逆動作可能な直流電動機と増速機構とを器体5に格納すると共に、器体の外側に増速機構の入力軸に接続されたクランクハンドルと給電ケーブル8を設けた構成であり、増速機構は、クランクハンドル側をウォームホイールとし、直流電動機側を複数条のねじのウォームとしたウォームギヤ機構で構成することにより、大きさと重量を大幅に低減している。
(もっと読む)
マットレスおよびその制御方法
【課題】高精度な体圧分散制御を可能とすると共に、セルの傾斜を解消して傾斜セルから加えられるせん断力による褥瘡の発生を有利に防止することができる、新規な構造のマットレスおよびその制御方法を提供すること。
【解決手段】セル24に加わる体圧に基づき、該セル24の傾斜の補正を行うセル傾斜補正領域102を設定するセル傾斜補正領域設定工程(S11、S12、S41)と、該セル傾斜補正領域102の外周エリアから中央エリアに向かって順次にセル24の圧抜と再圧入を行なうセル圧抜再圧入工程(S41、S42、S43)を設けた。
(もっと読む)
知能化離床・離床予測センサシステム
【課題】誤作動の防止等を目的とした、使用者の「離床」及び「離床予測」の検知システムを提供する。
【解決手段】フレキシブルバー20はポリエチレン、塩化ビニール等の柔軟性のある中空パイプである。フレキシブルバー20内にはピエゾケーブル18が収納されている。このような構成のセンサを、ベッドの上部背中部、中央部の腰部のそれぞれに設置する。統括マイコンは、ピエゾケーブル18の出力電圧及び周波数応答によりベッドの使用者の離床及び離床予測を判断する。
(もっと読む)
マットレスおよびその制御方法
【課題】使用感が向上されると共に、体圧分散による褥瘡の防止が有効に実現される、新規な構造のマットレスおよびその制御方法を提供すること。
【解決手段】人体を支持する基体28の体圧作用面上に複数のセル24を配設して、該セル24の内部に形成された流体室42の圧力を調節して前記セル24の高さを変更設定する圧力調節手段50を設けると共に、前記セル24の内圧(Pc)と、該セル24に加わる体圧(Pb)と、該セル24の高さ(H)との関係から、該セル24の目標高さ(Ht)となる該セル24の目標内圧(Pct)を設定する目標内圧設定工程(S3)を設けた。
(もっと読む)
マットレス
【課題】マットレスの一部を効率よく組み換えることができて、メインテナンス性や取扱性にも優れた、新規な構造のマットレスをを提供すること。
【解決手段】マットレス10は、人体支持面14の幅方向に延びるベース部材と、ベース部材の長手方向両端部上にそれぞれ設けられた連結部28a,28bと、ベース部材26の長手方向の中間部分に取り付けられるクッション体30aを含んで構成されたマットレスユニット20a,20bの複数を備え、それらマットレスユニット20a,20bが人体支持面14の長さ方向に整列配置されて、連結部28a,28bに設けられた連結手段106,108により、相互に着脱可能に連結されている。
(もっと読む)
関節運動アシスト装置
【課題】
構造がコンパクトであるとともに、関節運動を適切にアシストする。
【解決手段】
調整部によるシリンダ151内の空気圧調整により、シリンダ151からのピストンロッド153の突出部分が伸長すると、ピストンロッド153及び第1及び第2アーム部材141,142を介して、第2歯車部材123に、肘関節が伸展状態から屈曲状態へ向かう回動方向と略平行な方向で回動する回動力が付与される。第2歯車部材123に当該回動力が付与されると、第2歯車部位材123における第1歯車部材113との噛み合わせ位置が変化し、第2歯車部材123が、自転しつつ、第1歯車部材113の中心軸を中心として公転する。これにより、第2歯車部材123に固定的されている前腕外骨格部材121が回転し、上腕外骨格部材111と前腕外骨格部材121とが交差する角度が狭まり、肘関節は伸展状態から屈曲状態になる。
(もっと読む)
携帯電話操作半自動介護ベッド及び入浴システム
【課題】症状の重い入院患者、寝たきり老人等の看護、介護に有効で便利な多機能付きベッドを最小限のエネルギー消費で提供する。
【解決手段】ベッド基体を構成する長方形の枠体1の両端に回動可能に支持されたベッド本体7と、該ベッド本体7側端部での回動及び前記側端部から略中央部への平行移動が可能に構成された患者等移送用トレーを有し、加えて、IC制御を採用し機能を半自動化し、介護人の携帯電話との結合を図り、利便性を向上させる。
(もっと読む)
患者支持体用制御ユニット
【課題】マットレス等の患者支持体用の制御ユニットを提供する。
【解決手段】制御ユニット42の一実施形態は、ベース部と、ベース部に枢動自在に結合した表示部を含む。制御ユニットは、ネットワーク上で1つ以上の遠隔装置とデータを送受信するために1つ以上の通信ポートも含む場合がある。制御ユニットは、その中にメモリを挿抜可能なメモリポートも含む場合がある。制御ユニットは、例えば、患者がマットレスから退出すること等の誘発事項によって始動するように構成された視覚表示器をも含む場合がある。表示ユニットは、タッチスクリーンユーザインターフェースを含む場合がある。さらに、表示ユニットは、視聴覚材料を表示するようにも構成されている場合がある。
(もっと読む)
いびき防止ベッドシステム
【課題】いびき防止ベッドシステムを提供する。
【解決手段】いびき防止ベッドシステム2は、ベッド20と、感知装置21と、制御装置22とを備える。ベッド20は駆動装置200を内設し、駆動装置200はベッドの形状を改変することができる。感知装置21は、使用者Uの胸部位置に向かって、検出信号を発信し、使用者Uによって反射された反射信号を受信し、検出信号および反射信号に基づき、使用者Uがいびきをかいているか否かを判断する。感知装置21により使用者Uがいびき状態と判断された場合、制御指令が発信される。制御装置22は、制御指令を受信し、制御指令に基づき、駆動装置200を駆動し、ベッド20の形状をいびき防止モードに切り換えて、使用者Uの寝姿を改変する。これにより、使用者Uがいびきを始めたとき、速やかに使用者Uの寝姿を改変して、使用者Uのいびきを中断させることができる。
(もっと読む)
移乗支援装置の制御システム及び制御方法
【課題】バッテリセルに異常が生じた際に、アームを安定させることができる移乗支援装置の制御システムを提供する。
【解決手段】本発明の一形態に係る移乗支援装置の制御システムは、アーム4の駆動手段62と、アーム4の固定手段63と、駆動手段62に電源を供給する第1の電源装置64と、第1の電源装置64が有するバッテリセル64bと並列に設けられるバイパス回路64dと、バッテリセル64b又はバイパス回路64dを第1の電源装置64の他のバッテリセル64a及び64cと直列に接続する切替手段64eと、バッテリセル64bの異常検出手段66と、駆動手段62、固定手段63及び切替手段64eを制御する制御手段67と、を備え、制御手段67は、バッテリセル64bに異常が生じると、固定手段63を制御してアーム4を固定する。
(もっと読む)
介護ベッド用リモートコントローラー
【課題】介護ベッド用リモートコントローラーの使い勝手を向上させること。
【解決手段】本発明では、背部や脚部の受台(5)を起倒させたり昇降させるために用いる介護ベッド用リモートコントローラー(1)において、コントローラー本体(21)の後面に脚体(22,23)を上下に間隔をあけて形成した。また、前記脚体(22,23)の上下間隔を介護ベッド(2)に形成した側柵(6)の横桟(13〜16)の上下間隔と同一の間隔とし、側柵(6)の上下の横桟(13〜16)にそれぞれ上下の脚体(22,23)を係止可能とした。さらに、前記コントローラー本体(21)にフック(24)を設け、フック(24)と脚体(22,23)との間の上下間隔を介護ベッド(2)に形成した側柵(6)の横桟(13〜16)の上下間隔と同一の間隔とし、側柵(6)の上下の横桟(13〜16)にそれぞれ上下の脚体(22,23)及びフック(24)を係止可能とした。
(もっと読む)
リクライニングベッド
【課題】背ボトムの起立時に使用者の腹部を圧迫してしまうのを軽減したリクライニングベッドを提供すること。
【解決手段】本発明では、仰臥位で横臥している人の背部を支持する背ボトム(9)を起倒可能としたリクライニングベッド(1)において、背ボトム(9)の上面よりも突出して仰臥位で横臥している人の腰部を押圧する腰押圧部(14)を背ボトム(9)に形成することにした。また、前記背ボトム(9)と腰押圧部(14)とを連動機構(26)を介して連動連結することにした。さらに、前記連動機構(26)は、前記背ボトム(9)と腰押圧部(14)とを連動連結した連動状態と、前記背ボトム(9)と腰押圧部(14)との連動を解除した解除状態とに状態変更可能とすることにした。
(もっと読む)
知能化離床・離床予測センサシステム
【課題】介護者等が患者の離床時や離床予測を定量的な手法で遠隔から認識が可能である装置やプログラムを提供する。
【解決手段】頭部の重心移動を認識するための加速度センサ、胴体部の動きを認識するためのピエゾフイルム又は加速度センサを用いた生体センサ、上半身の加重を認識するためのピエゾケ−ブルセンサ、患者の全体重による加重を認識する為のピエゾケ−ブルセンサから構成されたセンサユニットとこれらの各々の出力情報を知能的に判断し、警報を発するためのマイコンユニット、情報の伝達に用いるLANユニット、電力ユニットから構成されている。携帯電話または、無線・有線LANのシステムを使用して遠隔から複数のベッドや患者のモニタリングを同時に実施することを可能にしている。緊急に助けを求めたい時は、IT知能枕を決められた方向に決められた回数を振る動作を繰り返すことにより、管理者や屋外の人に救助を求めることが可能である。
(もっと読む)
使用者保持装置および使用者保持装置上の使用者のポジショニングのための方法
【課題】ターンアシスト用の袋を膨張させて使用者を左側または右側に傾けることによって使用者の体位を、例えば、腹臥位から仰臥位に変えること支援することができる使用者のポジショニング方法を提供する。
【解決手段】使用者の現在の体位と標的の体位との不一致の識別と、現在の体位から標的の体位への移動に対応する方向、大きさ、および位置を持つ上昇勾配の確立とが含れ、方法の1つの変形において、上昇勾配を確立するステップは、予め定めた袋の膨張および収縮の手順の1つのサブステップであり、別の変形において、方法には不一致が修正されたかどうかの判断と不一致の未修正分への対応とが含まれる。コントローラは、センサーアレイから情報を受信し、使用者の準最適なポジショニングを識別する能力と、選択した体位変換用袋を膨張させるためのポンプへのコマンドを発行する能力とを持ち、それにより使用者が標的の体位へと促される。
(もっと読む)
人体支持装置
【課題】人体を支持する面が、全ての方向において体形にフィットするように沈み込み、その形状を維持するとともに、人の姿勢の変化に追従して自動的に沈み込み形状が変化する人体支持装置を提供する。
【解決手段】人体を支持する面を形成する可撓性をもった表皮部材1の周縁部をフレーム5に支持させ、表皮部材1の裏面側に、フレーム5に固定されたガイド部材9と、一端にヘッド部14を有し、ヘッド部14を表皮部材1に向けてガイド部材9に移動自在に支持されたロッド11と、ロッド11を一端方向に押圧するバネ部材15と、ロッド11の移動を拘束するロック及びその解除を行うロック手段18とからなる荷重受け機構8を複数の方向に所定のピッチで分布させて配置し、表皮部材1からロッド11に加わる荷重が所定値を越え、且つその荷重値が所定時間以上変化しないときに、ロック手段18によりロッド11をロックし、荷重がロック時の荷重値に対して変化したときにロッド11のロックを解除する。
(もっと読む)
1 - 20 / 194
[ Back to top ]