
Fターム[4C601JC23]の内容
Fターム[4C601JC23]に分類される特許
181 - 198 / 198
画像速度推定の改善
類似度を用いて連続する画像のブロック間の類似度を計算するブロックマッチング技法を用いる画像処理における画像速度推定方法。類似度を用いて候補速度の確率密度関数を計算する。この計算は、値がフレーム内の位置に依存しないパラメータを類似度に掛ける類似度の指数関数に基づく。候補速度を閾値処理して確率の低いものを除外する。全てのフレームを最初のフレームに同時位置合わせすること、位置合わせ誤差を計算すること、および、パラメータと閾値の値を変化させて位置合わせ誤差を最小化することによってパラメータおよび閾値の値を最適化する。類似度は、例えば比較されるブロック中の画像サンプルの数で割ることによってブロックのサイズに対して正規化される。用いられる類似度は、類似度を計算する前に、比較される2ブロックの平均および標準偏差が同じになるように調節されるCD2−bis類似度であってもよい。これにより、類似度は特に超音波画像に適したものとなる。さらに、第1フレームと第3フレームとにおける、および、第2フレームと第3フレームとにおける、ブロックの強度を比較し、第2フレームのブロックに最も良く一致する第3フレーム中のブロック、およびそのブロックの第1フレームにおける対応位置を見つけることによって、シーケンスの3フレームにわたってブロックマッチングを行ってもよい。 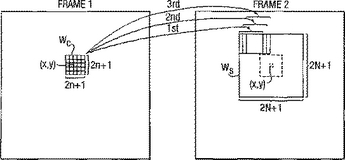 (もっと読む)
(もっと読む)
虚血性心疾患の超音波診断方法及び装置
心臓の左心室の異常を検出するための診断撮影方法及び超音波システムについて開示している。僧帽弁を含む画像のシーケンスが、そのシーケンスの画像各々における僧帽弁の場所を特定するように、取得されて処理される。そのシーケンスにおける現画像における及び先行画像における僧帽弁の場所を描く画像により、グラフィックが表示される。好適には、僧帽弁の場所は、それらの画像の各々における僧帽弁面の自動検出により特定される。連続的な異なる僧帽弁の各々の望ましいグラフィックカラー符号がそのグラフィックにおいて位置決めされる。それらの画像及びグラフィックを、左心室の伝導遅延及び梗塞の影響を識別するようにリアルタイムで観察することができる。 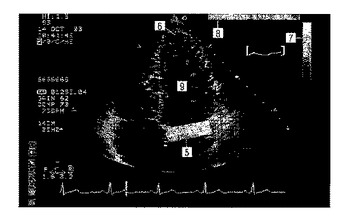 (もっと読む)
(もっと読む)
医療用画像における特徴を相関させるための画像処理システム及び医療検査装置
多次元画像における形状を相関させる画像処理システムは、類似度を推定する画像データ処理手段を有し、当該画像データ処理手段は、2次元画像における各ウィンドウにおいて画定される形状を表す2つの画像信号を推定する手段と、合成されたものから変換されたスカラー値エルミート係数集合が生成される2つの第1スカラー値エルミート係数集合の評価を実行するため、前記2つの画像信号に適用されるエルミート変換を使用する手段と、ウィンドウ化された相関関数の計算を実現するため、前記変換されたスカラー値エルミート係数集合に逆エルミート変換を適用する手段と、前記形状を相関させるため。前記ウィンドウ化された相関関数の最大値を所望の類似度として推定する手段とを有し、該画像処理システムはさらに、前記相関された形状及び/または処理された画像を表示する手段を有する。本システムは、画像の代わりに相関関数及び画像信号のスカラー値エルミート係数に関する回転、変換及びスケール変更を適用する手段を有する。本システムは、大域的複雑形状から異なる変形を局所的に示す部分を有する複雑形状を相関させることが可能である。本発明はまた、当該画像処理システムに結合された検査装置に関する。  (もっと読む)
(もっと読む)
マルチモダリティマンモグラフィ用診断システム

方法が、関心領域の第一イメージング情報を採取し、前記第一イメージング情報は前記関心領域を含む基準枠の3つの空間的次元に相関されているデータを与えるものであり、前記関心領域の第二投影イメージング情報を採取し、前記第二イメージング情報は前記基準枠に相関しているが少なくとも1つの空間的次元に関する情報を欠如しており、且つ前記第一イメージング情報が前記第二イメージング情報と共に登録されるように前記第一及び第二イメージング情報を処理する、ことを包含している。装置(図19)は、関心領域(図19、供給源)のイメージング情報を採取する第一イメージングシステム、前記第一イメージング情報は前記関心領域を含む基準枠の3つの空間的次元と相関されているデータを与えるものであり、前記関心領域(図19、ターゲット)の第二イメージング情報を採取する第二イメージングシステム、前記第二イメージング情報は前記基準枠に相関しているが少なくとも1つの空間的次元に関する情報を欠如しており、且つ前記第一イメージング情報が前記第二イメージング情報と共に登録されるように前記第一及び第二イメージング情報を処理するプロセッサ(図19、融合したイメージ)を包含している。 (もっと読む)
超音波診断装置

【課題】組織の運動方向に合わせてバイプレーンの最適な回転位置を設定する。
【解決手段】バイプレーンである走査面セットは第1走査面S1及び第2走査面S2によって構成される。それぞれの走査面上においてフレーム間での相関処理により注目組織の運動成分が求められる。それらの運動成分により注目組織の移動方向が求められる。その移動方向に第1走査面が合致するように走査面セットが回転駆動される。これにより第1走査面に対応する断層画像上においては常に注目組織が断面として表示されることになる。
(もっと読む)
超音波血流イメージング装置
【課題】 動態表示に優れた広範囲のBMI(Blood Motion Imaging)画像データの生成が可能な超音波血流イメージング装置の提供。
【解決手段】 被検体の複数方向に対し所定間隔Trで順次超音波送受波を行ってBMI画像データの生成を行なう際に、所定方向に対する最初の超音波送受波から次の超音波送受波を行う間に他の複数方向(M−1)に対する超音波送受波を順次行なう、所謂M段の定間隔交互走査によって前記所定方向からの受信信号を間隔Tx(Tx=M・Tr)でM回収集する。そして、複数の走査方向の各々において前記間隔Txで得られる所定深さの受信信号に対し血球からの反射波成分を抽出するためのFIRフィルタ処理を行ない、このFIRフィルタ処理において順次出力されるデータ列のデータに基づいて複数時相における複数枚のBMI画像データを生成する。
(もっと読む)
標的病変における変化の精密な測定評価のための医療用撮像システム
体の部分(204)がスキャンされて(20)、第1の1組の画像化データ(214A)を生じる。画像化データ中の標的病変(5、202A)が識別される(30)。引き続き、体の部分(204)は、第2の1組の画像化データ(214B)を生じるように再スキャンされる(40)。標的病変(5A、202B)は、第2の1組の画像化データ中で識別され、第1および第2の組の画像化データに対応する2つの明白な画像容積を判定するために、標的病変(5、202A)の大きさが、第1および第2の組の画像化データ中で測定される(60)。第1および第2の明白な病変の大きさ(301A、301B)を比較することによって、大きさの変化が推定される(70)。大きさ測定値の変化に対する限界を判定するように、大きさの変化における分散が推定される(80)。
 (もっと読む)
(もっと読む)
医用画像のための自動決定支援を提供するシステムおよび方法
医用画像から解剖学的構造および像(または姿勢)を自動的に識別し、医用画像を処理して医用画像の診断品質を自動的に評価するためのシステムおよび方法が提供される。一態様においては、医用画像に関する自動決定支援方法は、画像データを取得すること、医用データから特徴データを抽出すること、および抽出された特徴データを用いて解剖学的構造の識別、像の識別および/または画像データの診断品質を決定することを自動的に実行することを含む。  (もっと読む)
(もっと読む)
画像情報を用いるカテーテル追跡用システム
体内のカテーテルの位置追跡用システムであって、画像データを解析することによって、カテーテルのイメージングヘッドの位置を計算するものである。上記解析は、自由裁量によって選択された基準面に対する、3次元空間内のイメージングヘッドの位置を測定して行う。画像は、基準画像と比較され、2つの画像の対応する位置の相関データが収集され、特定方向の相関損失率が、測定される。この相関損失率は、指数関数のように変化する。指数関数は、画像と、基準画像と、の間の分離角度を概算し、評価される。1以上の分離角度は、基準画像に対する、画像の位置を測定するのに用いられる。この処理を一連の画像について繰り返し実行することによって、カテーテルの位置が、測定される。その上、体内の腔のマップが、生成できる。 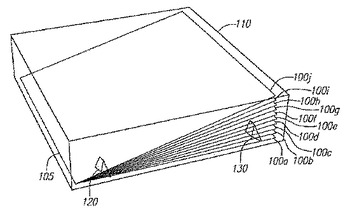 (もっと読む)
(もっと読む)
ロバストな情報融合を利用するオブジェクトのマルチモーダルコンポーネントベースドトラッキングのための方法及びシステム
オブジェクトをトラッキングするための方法及びシステムが開示される。複数の画像フレームを含むビデオシーケンスが受信される。オブジェクト外観分布のサンプルベースの表示が維持される。オブジェクトが1つ以上のコンポーネントに分割される。各コンポーネントに対してサンプルベースの表示に関してその位置及び不確定性が推定される。最も主要な動きを決定するために各コンポーネントに対して可変バンド幅密度ベースの融合(Variable Bandwidth Density Based Fusion VBDF)が適用される。動き推定値がオブジェクトのトラックを決定するために使用される。  (もっと読む)
(もっと読む)
血管エラストグラフィのための方法およびシステム
i)組織運動前および組織運動後画像が血管全体の第1および第2の時間遅延構成を表す、血管壁によって境界を定められた血管のデジタル形式の組織運動前画像および組織運動後画像を含む無線周波数(RF)画像の配列を取得するステップと、ii)血管壁内部の組織運動前および組織運動後画像の両方を対応するデータウインドウへと分割するステップ、対応するデータウインドウのために組織運動前と組織運動後の間で軌道に近似値を算出するステップ、および各データウインドウで完全なひずみテンソルを計算し、フォンミーゼス係数の判定を可能にするために各データウインドウ軌道を使用するステップを含む、血管エラストグラフィのための方法。方法は、非侵襲血管エラストグラフィ(NIVE)、小血管での非侵襲血管マイクロエラストグラフィ(MicroNIVE)、および血管内エラストグラフィ(EVE)に適合させることができる。  (もっと読む)
(もっと読む)
医用撮像のための方法及び装置
造影剤注入前及び造影剤注入後に収集されたデータを解析することによる、1つの部位または複数の部位の、解剖学的、形態的または構造的な特徴の検出、位置決定及び定量化のための方法。誘導カテーテル(402),造影剤送出システム(406)及び誘導ワイア(408)に沿って進み、遠端にプローブ(412)を有する、マイクロカテーテル(410)を備える、方法とともに使用するためのカテーテルも開示される。  (もっと読む)
(もっと読む)
超音波体動検出装置、及びこれを用いた画像提示装置及び超音波治療装置
検査対象の3次元的な体動を検出する超音波体動検出装置を提供する。
検査対象に対して超音波を送信し検査対象からの反射信号を取得する圧電素子がアレイ状に配列された第1及び第2の超音波探触子13と、第1及び第2の超音波探触子によって取得した反射信号から、検査対象の体動評価に用いる評価領域を抽出し、評価領域内の3次元的な体動を検出する体動検出部20と、評価領域内の3次元的な体動を表示する画像表示部19とを有し、第1及び第2の超音波探触子による超音波走査面が交叉している。
(もっと読む)
方法
本発明は、超音波造影剤を事前に投与しておいた被検体からのリンパ節の超音波画像を、リンパ節のコントラスト増強パターンの定量的尺度が得られるように処理する方法に関する。 (もっと読む)
細いプローブを使用する経食道超音波
経食道心エコー検査は、直径7.5mmのプローブ内に収まる十分な小ささであるのが好ましい、また直径5mmのプローブ内に収まる十分な小ささであるのが最も好ましい、小型横向きトランスデューサを使用して実装される。信号処理技術により、浸透深さは、トランスデューサが非常に小さいにも関わらず左心室の完全な経胃短軸像が得られるまで改善する。プローブの直径を小さくする(従来技術のプローブに比べて)と、患者へのリスクが低減され、麻酔の必要性が減じるか、または全くなくなり、患者の心臓機能の長時間の直接的視覚化の監視を行える。  (もっと読む)
(もっと読む)
局所的に変形する可能性のある動きを分析するための装置および方法
本発明は、局所的に変形可能な動きを分析するための方法、およびある対象物体の局所的な動きをその全体運動から分離して対象物体の動きを精確に追従するための方法および装置に関する。対象物体はイメージシーケンスとして観察される。この場合、対象物体領域イメージと背景イメージ領域を識別するために、イメージ領域がサンプリングされる。全体運動によって作用の及ぼされる背景イメージ領域を識別するために、識別された背景イメージ領域のうち少なくとも1つの領域の動きが推定される。イメージフレーム中の全体運動を測定するために、複数の背景イメージ領域からの動きが組み合わせられる。対象物体の局所的な動きを測定するために、対象物体イメージ領域において測定された全体運動が補償され、対象物体の局所的な動きが追従される。さらに本発明は、2つのコントロールポイントセット間の相対運動として対象物体の局所的に変形可能な動きを精確に測定するための方法および装置に関する。コントロールポイントセットは、対象物体の内側の輪郭および外側の輪郭として定義される。この場合、コントロールポイントセットの動きが推定され、対象物体の局所的な変形と局所的な動きを表すために相対的な動きが用いられる。  (もっと読む)
(もっと読む)
構造テンソルを利用して肺小結節及び大腸ポリープを検知する方法及びシステム
ディジタル画像中の球形対象を識別する方法を提案する。画像は複数の3D空間点を含む。この方法は画像ドメイン内の各点において画像の勾配を計算し(100);画像ドメイン内の各点において基本構造テンソルを計算し(102);画像ドメイン内の各点の構造テンソルを求め(103);構造テンソルの固有値を求め(104);各構造テンソルについて、前記構造テンソルの最小固有値と前記構造テンソルの最大固有値の比で表される等方性値を計算し(105)、球形対象であることを示す等方性度=1を見出すステップから成る。  (もっと読む)
(もっと読む)
分類プロセスへの空間的知見の組込み
発明者は対象の空間的位置に基づく複数の異なる分類子を使用することを提案する。このアプローチの背景には、複数の分類子の方が特徴空間全体をカバーする“ユニバーサル”分類子よりも正確に局所コンセプトを学習できるのではないか、という直感的なアイデアがある。局所分類子を採用すれば、特定の類に属する複数の対象がこの特定類中において互いに高度の類似性を有することになる。局所分類子の採用は、特に分類子がカーネル方式である場合、メモリー、ストレージ及び性能全般の向上にもつながる。ここで使用する語“カーネル方式分類子”とは元の訓練データを、分類タスクを容易にする、より高い次元の空間にマップするためにマッピング機能(即ち、カーネル)が使用されている分類子を意味する。 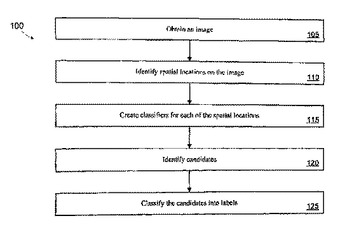 (もっと読む)
(もっと読む)
181 - 198 / 198
[ Back to top ]