
Fターム[4D074CC57]の内容
特殊噴霧装置 (3,458) | 薬剤等の散布装置 (807) | 散布装置の制御又は検出 (75) | 薬剤等の量に関するもの (34)
Fターム[4D074CC57]に分類される特許
1 - 20 / 34
防除作業機
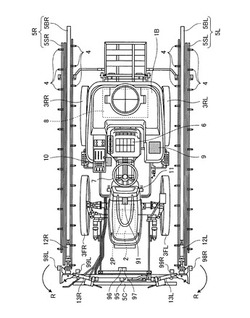
【課題】防除作業機が圃場で薬剤を散布しながら旋回しているときにおいて、防除作業機の散布ブームの操作に対する作業者の負担を低減すること。
【解決手段】防除作業機1は、車体1Bと、薬剤を散布する複数のノズル4が取り付けられるとともに、車体1Bの前後方向に対して両側にそれぞれ設けられる第1散布ブーム5L及び第2散布ブーム5Rと、車体1Bが旋回しているときに車体1Bの旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチと、前記自動リフトスイッチが前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたときには、旋回外側の散布ブームを上昇させる制御装置9と、を含む。
(もっと読む)
散布作業機

【課題】散布装置による薬液の散布量を制御する散布作業機の提供。
【解決手段】操作パネルを通じて圧力優先モードが設定されている場合、設定された単位反当たりの散布量を基に散布圧力の設定を行い、目標車速を算出する。散布開始が指示され、目標車速に到達した後、散布を開始する。自動走行制御中に散布量の変更が指示された場合(S24:YES)、目標車速を再計算し(S25)、変更後の目標車速に従って車速の制御を行う(S27)。
(もっと読む)
農用作業車の静電散布装置
【課題】所定間隔毎に噴霧ノズルを備えている後側散布ブームと前側散布ブームを左右方向に沿わせて前後に並列配設した多量散布装置において、構成を簡単化し軽量化した静電散布装置を提供する。
【解決手段】所定間隔毎に噴霧ノズルを備えている後側散布ブーム及び前側散布ブームを左右方向に沿わせて前後に並列配設し、後側散布ブームの散布ノズルの後方下方部位に後高電圧電導体を所定間隔空けて並列配設し、前側散布ブームの散布ノズルの前方下方部位に前高電圧電導体を並列配設し、後側散布ブームの噴霧ノズルと前側散布ブームの噴霧ノズルとの中間部位に単一の中間高電圧電導体を並列配置し、これら前後中間高電圧電導体に高電圧を印加するように構成する。
(もっと読む)
薬液散布作業車両
【課題】GPSからの速度情報が気象、地形などの影響を受けて得難い場合にも車速を知ることができ、得られた車速に基づき薬液散布量が制御可能な薬液散布作業車両を提供すること。
【解決手段】位置情報と速度情報をGPSから受信できるGPS受信機81と車輪12又は13の回転数を検出する車速センサ4と薬液を吐出する防除ポンプ65による薬液吐出圧力に応じて薬液散布量を調節する防除機Bを備えており、GPSからの情報に基づき車速VG及び/又は車速センサ4による車速Vs又は車速VGと車速Vsの平均化された車速と、予め設定された単位面積当たりの薬液散布量Aとの関係から防除ポンプ65の吐出圧力を計算し、該吐出圧力計算値に一致するように薬液流量調節弁73の開度の調整をして予め設定された単位面積当たりの薬液散布量Aが均一になるように制御する制御装置100,101を備えている薬液散布作業車両である。
(もっと読む)
噴霧装置及び噴霧方法
【課題】噴霧軌跡の柔軟な設定、又は噴霧空間内の噴霧ムラの低減が可能な噴霧装置、及び噴霧方法を提供すること。
【解決手段】加圧水をノズル先端から噴出しファンによる気流にのせて霧を放出する送風手段を備えた噴霧装置において、前記送風手段の縦回転軸の仰角を調整可能な仰角調整手段を設けることによって、噴霧軌跡をより柔軟に設定することを可能とした。また、前記縦回転の回転速度、又は送風手段の風量、水圧若しくは水量、のうち少なくとも何れかを、前記縦回転の旋回角度に応じて調整しながら噴霧することにより、噴霧空間内の噴霧ムラの低減を可能とした。
(もっと読む)
散布機
【課題】 繰出ロールによってホッパーから繰り出される施用剤を、送風機から送風する噴送筒を通して搬送しながら、施用散布する散布形態にあって、この噴送筒の噴出口部に清掃作業等の送風ユニットを取付接続して付帯作業を行うときは、誤って繰出ロールを駆動すると、施用剤がこの送風ユニットから吹き出されて、機体の清掃箇所へ吐き出したり、機外へ排出されることになる。
【解決手段】 繰出モータMにより繰出ロール1を駆動回転してホッパー2の施用剤を繰出しながら、送風機4により噴送筒5を経て散布ブーム6へ噴送して散布する散布機において、前記噴送筒5に、噴風清掃用の送風ユニット12を接続することによって、前記ホッパー2の残留施用剤を取出し排出するための排出スイッチ3操作による繰出モータMの駆動出力を牽制する。
(もっと読む)
防除機の散布量表示装置
【課題】防除機において、小型の流量センサにより散布ブームの大散布流量を測定する。
【解決手段】防除ポンプからの吐出薬液を圧送する高圧吐出経路における流量制御弁の下手側から中央高圧散布経路と左右高圧散布経路とに分岐し、中央高圧吐出経路の中途部に中央コックを、終端部に所定数のノズルを備えた中央散布ブームを設け、左右高圧散布経路の中途部に左右コックを、終端部に所定数のノズルを備えた左右散布ブームを設ける。中央高圧散布経路における流量制御弁と中央散布コックとの間にだけ小型の流量センサを設け、中央コック、左右コックの開閉検出手段を設ける。流量センサの検出値に基づき左右散布ブームの散布流量を所定の計算式により算出し、流量センサの検出値と合算しディスプレイに表示する防除コントローラを設ける。
(もっと読む)
散布機の粒剤散布装置
【課題】所定の一様散布精度による小流量の薬剤散布を確保するとともに、大流量の肥料散布を能率良く処理することができる散布機の粒剤散布装置を提供する。
【解決手段】散布機の粒剤散布装置は、薬肥粒剤を収容するタンク(11)と、その底部から粒剤を定量繰出しする繰出部(12)と、この繰出部(12)から受けた粒剤を送風搬送する第1噴管(13)と、この第1噴管(13)と連通して粒剤を散布する第2噴管(14)とを備えて構成され、上記繰出部(12)は、回転数の個別制御が可能な2つの繰出ロール(15)を並列に構成するとともに第1噴管(13)に共に連通することにより、小流量時の一様散布を確保しつつ、高速走行で大流量の粒剤散布が可能となる。
(もっと読む)
走行散布機
【課題】車速に連動して、しかも安定した状態で繰出ロールから粒状物(肥料)を散布することができる走行散布機を提供する。
【解決手段】粉粒体散布装置の肥料を繰り出す繰出ロールを駆動モータで駆動させて圃場に肥料を散布するとき、繰出ロールの回転数を車速に連動させ、かつ繰出ロールの駆動モータの回転数が設定上限値を超えた場合、自動的に車速を減速し、駆動モータの制御可能な回転数の範囲内に入るように制御する制御装置を備えた走行散布機であるので設定した通りに均一に肥料散布できる。また、繰出ロールの駆動モータの回転数が設定上限値を超えた場合、自動的に車速を減速し、駆動モータの制御可能な回転数の範囲内に入るので、オペレータはすぐに駆動モータの制御可能な回転数の領域外の作業速にあったことを認識できるので、すばやく対処できるメリットがある。
(もっと読む)
防除機の散布制御装置及び散布制御方法
【課題】散布制御装置に使用される各種センサの異常を作業現場で簡易に確認することができる。
【解決手段】制御手段10は、センサ(圧力センサ21,流量センサ22,車速センサ23)の出力に基づいて各センサの異常を検知するセンサ異常検知手段11を備え、センサ異常検知手段11は、異常検知するセンサを特定して、該センサで検知する散布条件が設定された目標値になるように散布装置1又は走行機体を動作させた状態で、当該センサの検出値を目標値と比較し、センサの検出値と目標値との差が設定された許容範囲を外れる場合にセンサの異常を検知する。
(もっと読む)
防除機の散布量制御装置及び散布量制御方法
【課題】散布ノズルを交換した場合に散布ノズルの特性情報の設定を作業現場で簡単に行うことができること、特性情報が未知の散布ノズルを採用する場合に信頼性の高い特性情報を得て、散布条件を広範囲に調整しながら精度の高い散布量制御を行うことができること。
【解決手段】散布条件の検出値が設定された目標値になるように検出値と散布ノズルの特性情報に基づいて散布量を制御する制御手段10を備え、制御手段10は、散布装置1に装備された圧力センサ21と流量センサ22の検出値に基づいて散布ノズルの特性情報を設定するノズル情報設定手段11を備え、ノズル情報設定手段11は、散布装置1の異なる作動状態で圧力センサ21と流量センサ22の検出値を同時に取得し、複数の作動状態で取得した圧力センサ21と流量センサ22の同時検出値によって散布ノズルの特性情報を設定する。
(もっと読む)
液体散布装置
【課題】 瞬間流量や積算流量の把握は勿論、それに加えて他の種々の効果も得られる液体散布装置を提案する。
【解決手段】 散布液タンク2からポンプ3により吐出される液体を散布側Aと前記散布液タンク3への戻し側Bとに切換えるための手動式のコック4を備える液体散布装置1であって、前記ポンプ3と前記コック4の間に流量センサ5が配設され、前記コック4が前記散布側Aへ切り換えられているか否かを検知する検知手段6,7と、前記流量センサ5による検知結果と前記検知手段6,7による検知結果を受けて所定の演算を行う制御手段8を備える。前記検知手段としては、前記散布側に配設される圧力センサ6や、前記コック4の切換操作部材20の操作により開閉するリミットスイッチ7を挙げることができる。
(もっと読む)
防除機の散布量制御装置及び散布量制御方法
【課題】現場での作業前に、簡単に散布条件の適正範囲が確認でき、特に、単位面積当たりの目標散布量を設定した場合に、どれ位の作業速度で防除機を走らせれば適正な散布条件での散布量制御が可能であるかを作業者が把握できるようにする。
【解決手段】検出された散布条件が設定入力された目標散布条件になるように散布量を制御する制御手段10を備え、制御手段10は、目標散布条件の調整可能範囲を表示して調整可能範囲内での設定入力を可能にする表示入力手段11を備え、複数の目標散布条件を一つずつ設定入力可能にすると共に、先に設定入力された目標散布条件に基づいて後に設定入力可能にする目標散布条件の調整可能範囲を決定する。
(もっと読む)
農作業車の静電散布装置
【課題】静電散布装置において作物の茎葉部に薬液を均等散布する。
【解決手段】散布ブーム4に略所定間隔毎に設けている噴霧ノズル3,…の下方に、左右方向に沿った棒状の前後高電圧電導体61,61を配設し、該前後高電圧電導体61,61に高電圧を印加するように構成し、前記散布ブーム4の噴霧ノズル3,…の下方に位置する前後高電圧電導体61,61のみを、平面視で前記噴霧ノズル3,…から互いに前後左右に遠ざかる円環部61a,…に構成し、左右に隣接する円環部61a,…を左右方向に沿った直線状部で接続するように構成したことを特徴とする農作業車の静電散布装置の構成とする。
(もっと読む)
粒状物の散布装置
【課題】第2噴管が機体進行方向に対して直交する方向に向いている場合と斜めに向いている場合で単位面積あたりの粒状物の噴霧量が同一となるようにした散布装置を提供すること。
【解決手段】タンク10内の粒状物(肥料など)を圃場に散布する機体左右の第2噴管14L,14Rを、傾斜角度変更する手段45,46により左右に延びた姿勢から前方向又は後方向に機体の真横から傾斜させ、少なくとも粒状物設定散布量と車速と第2噴管14の機体進行方向に直交する方向からの傾斜角度πから粒状物の繰出装置11の繰出ロール20の回転数を制御部15で算出する散布装置であり、畦までの距離が短くなると、第2噴管(ブーム)14を前記傾斜角度πの変更によって畦内側に寄せると共に、その角度変化を検出して粒状物繰出量(散布量)を制御することにより、散布過多をなくして適正量の粒状物を散布できる。
(もっと読む)
散布機の残留施用剤排出装置
【課題】 ホッパー内の施用剤を繰出ロールの回転によって繰出して、施用剤散布と、このホッパー内の残留施用剤の排出とを行わせる形態では、繰出ロール等の機構を共用化して、構成を簡単化できるが、誤操作のないように注意する必要がある。
【解決手段】 車速に応じた施用剤量を繰出しながら散布する散布機において、この繰出ロール1を車速に応じた回転に駆動して散布制御する散布スイッチ2と、この繰出ロール1を駆動して施用残量を排出制御する排出スイッチ3とを設けた。散布作業時は、散布スイッチ2を操作することによって繰出ロール1を駆動して、ホッパーに収容の施用剤を繰出しながら散布ブームへ送出して走行圃場面等に散布する。散布作業後にホッパー内に残留する施用剤を別途容器等に取出排出するときは、前記散布スイッチ2とは別の排出スイッチ3を操作する。
(もっと読む)
耐トラッキング性試験用試験液塗布装置及び耐トラッキング性試験方法
【課題】耐トラッキング試験にあたって試験対象に対して試験液を塗布する際に、試験液を所望の方向に向けて塗布すると共に広範な範囲に塗布することができ、且つ正確な塗布量と塗布間隔でこの試験液の塗布を行うことができる耐トラッキング性試験用試験液塗布装置を提供する。
【解決手段】試験液1を貯留する試験液タンク2を具備する。試験液1を噴霧状に吐出するノズル部3を具備する。試験液1が流通する流路を具備する。試験液タンク2内の試験液1を流路へ流入させるための駆動力を供給する駆動部4を具備する。流路内の試験液1の加圧状態を調整して一定の圧力でノズル部3へ送る加圧調整部5を具備する。流路におけるノズル部3への試験液1の供給を開閉する開閉弁6を具備する。前記駆動部4及び開閉弁6を制御することでノズル部3からの試験液1の吐出量及び吐出間隔を調整する制御部7とを具備する。
(もっと読む)
自走型防除機の薬液散布制御装置
【課題】 従来、ノズルが長時間の使用で磨耗した場合は、散布過多になって薬害が生じ、必要以上の農薬が必要となる問題があった。本発明は、かかる問題点を解消することにある。
【解決手段】 本発明は、車速に連動して自動的に散布量を変更するマイコン防除コントローラ(20)を備えた自走型防除機において、予め散布するノズル(11)の任意の作業速での流量を測定し、この測定された実流量値を基にして現在の作業速での流量が所定の割合を超えると流量過多による異常と判定する異常判定手段(A)を設ける。
(もっと読む)
畦畔散布機
【課題】畦畔散布機においては、圃場に対し常に単位面積あたりの散布量が均一であることが望まれる。しかし、薬剤散布開始時では動力散布の出力が安定するまでに時間を要するので、該出力安定までは均一に散布はできない。例えば、始動時の低出力では散布距離は短いので、前述した単位面積あたりの散布量は出力安定時のときより多くなってしまう。
【解決手段】自走式の畦畔散布機1において、走行部に走行速度検知センサー66を設け、動力散布装置17の薬剤散布を駆動によるスピンナーの回転によって可能とし、該スピンナーの回転数検知センサー65を設け、前記動力散布装置の薬剤タンクよりの散布薬剤量を制御する手段を設け、前記走行速度と、前記動力散布回転数の検知によって、制御部15によって散布量を可変制御可能とした。
(もっと読む)
薬剤散布制御装置
【課題】走行しながらノズルより薬剤を散布する薬剤散布装置のコントローラでは、薬剤の散布量を制御するプログラムが対応していないノズルを使用する際には、コントローラをサービスセンタ等に送ってプログラムを書き換える必要があった。
【解決手段】コントローラ33においては、3段階の吐出圧におけるノズルの吐出流量を入力すると、以下の演算式の定数a、b、cを求める。y=(VL/200)2+b(VL/200)+c。ここで、yが吐出圧で、Vが走行速度で、Lが単位面積当たりの散布量である。式は、走行速度Vに対して吐出圧yを求める演算式である。この演算式は、走行速度の変動に対する吐出圧の変更を制御し、走行速度が変動しても単位面積当たりの散布量Lが一定となる制御に用いられる。
(もっと読む)
1 - 20 / 34
[ Back to top ]