
Fターム[4F035BB32]の内容
噴霧制御装置 (2,732) | 放出制御用検出装置 (234) | スプレーヘッドの検出 (20) | 速度又は位置の検出 (16)
Fターム[4F035BB32]に分類される特許
1 - 16 / 16
ハンドガン制御装置
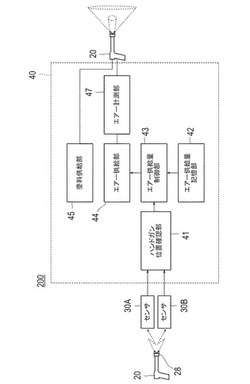
【課題】ハンドガンの位置に応じて塗料の霧化状態や噴射形状を調整する。
【解決手段】ハンドガン20はエアーにより車両に塗料を吹付ける。ハンドガン位置認識部41は車両に対するハンドガン20の位置を認識する。エアー供給量記憶部42はハンドガン20の位置とハンドガン20に供給するエアーの量との関係を記憶する。エアー供給量制御部43はハンドガン位置認識部41が認識したハンドガン20の位置とエアー供給量記憶部43が記憶するハンドガン20の位置とハンドガン20に供給するエアーの量との関係から、ハンドガン20に供給するエアーの量を制御する。
(もっと読む)
基板遮蔽層形成方法及び装置及びプログラム

【課題】電子部品の搭載された基板は樹脂系のコーティング剤を塗布することによって基盤遮蔽層を形成し、錆や腐食が生じないように覆われていた。しかし電極の為のホールや端子部分にコーティング剤を塗布すると不良品の発生になった。
【解決手段】ディスプレイ上でコーティング禁止エリアを設定し、制御部によってノズルパスを演算し、効率よく塗布作業するようにプログラミングするとともに、マスキング作業を不要にしたので簡単に塗布作業ができるようになった。
(もっと読む)
液体塗布装置
【課題】液剤塗布における各種の塗布条件や生産数量等に対して、より標準的にシステム化対応する。
【解決手段】基本的な塗布対応構成の塗布ロボット1において、塗布ヘッド9をX方向に駆動させるX軸駆動部7、塗布ヘッドを上下させるZ軸駆動部10、塗布部材5をY方向に位置決めするY軸駆動部8と、Y軸部と一体駆動可能な様に組み付け、塗布部材を回転させるθ軸駆動部11で構成し、塗布部材に対して上記塗布ロボットの各軸を選択して塗布を行う。また、各種の塗布に対しては、塗布ロボットを単体から定ピッチで連結可能な構成とすることによりシステム化対応まで可能となり、塗布部材に対し最適な塗布ができる。また塗布に関連する各種の機能ヘッドにおいても、取付互換性を持たせて選択搭載し、各種塗布部材に対して最適な構成で液剤塗布をする。
(もっと読む)
コーティング経路生成の方法および装置
【課題】構成要素をコーティングするためのスプレーガンの動作経路の生成の改良された方法を提供する。
【解決手段】コーティング経路生成の方法は、表面形状の不確かなデータを分析する能力、CADデータに基づくドラフトロボット経路の作成、実際的なロボット動作を伴うオフラインのコーティング厚さシミュレーション、シミュレートされた厚さ分布の分析、およびそれに続く構成要素全体が所望の厚さ許容差を達するための初期経路の反復調整に基づく。
(もっと読む)
スプレー噴射状態監視装置
【課題】透明色又は白色系の流体物を噴射するスプレーの噴射状態の良否を正確に判定することができるスプレー噴射状態監視装置を提供する。
【解決手段】スプレーの噴射状態を撮影する撮影部と、黒色系であって、スプレーを挟んで撮影部と対面するよう設けてある背景板と、スプレーから噴射された流体物を照明するが、背景板の撮影される部分を照明しないように配置されている照明部と、撮影部により撮影された画像データにおいて、スプレーのノズルの先端から所定の距離、範囲にある領域を二値化処理して、流体物と背景に区分けし、得られたデータに予め登録されたデータを照らし合わせる、及び/又は、流体物と背景に区分されたデータにおける流体物の面積を算出することにより、スプレーの噴射状態が正常か否かを判定する画像処理部とを備える。
(もっと読む)
液滴塗布装置および液滴塗布方法
【課題】塗布対象物に液滴を吐出して塗布パターンを形成する処理を正確に実行することができる技術を提供する。
【解決手段】撮像ユニット70は、塗布対象物である基材シート90に対して相対移動しながら基材シート90を撮像して、基材シート90の撮像データを取得する。塗布ユニット10が備える塗布ヘッド11は、基材シート90に対して薬液を液滴として吐出する。制御部は、撮像ユニット70が取得した撮像データに基づいて塗布ヘッド11からの薬液の吐出を制御して、基材シート90上に所定の塗布パターンを形成させる。
(もっと読む)
塗装用ロボットのティーチング装置、及びティーチング方法
【課題】熟練した技能者が塗装用手吹きガンを用いて塗装対象物を塗装したときの塗装用手吹きガンの動きを塗装用ロボットに容易に再現させる。
【解決手段】塗装用手吹きガン10に取り付けられて塗装用手吹きガン10に作用する加速度を時系列で検出する加速度センサ(図中の加速度・角速度検出部14内に収容されている)と、加速度センサにより検出された加速度を記憶する記憶手段(図中の制御装置13内に収容されている)と、記憶手段に記憶されている加速度に基づいて、塗装用ロボット20に塗装用手吹きガン10の動きを再現させるための位置制御データを生成する生成手段(図中の制御装置13内に収容されている)と、を備える。
(もっと読む)
耐火物吹き付け方法および吹き付け装置
【課題】溶融金属用容器の内壁の位置や形状に応じて、常に好適な位置および角度で耐火物を吹き付けることができる耐火物吹き付け方法および吹き付け装置を提供する。
【解決手段】溶融金属用容器10の内壁の表面形状を計測して容器10内面の展開図上に表示するとともに、耐火物を吹き付けるノズル25の位置および角度をリアルタイムで検出してノズル25による耐火物吹き付け点を算出し、展開図上における吹き付け点を表示器45に表示する。展開図と表示器45とを対比しながらノズル25の位置および角度を調整する。
(もっと読む)
少量排気自動塗装システム及び被塗装物フィーダー
【課題】
塗装室特にスプレー用塗装室は、塗料ミストを捕集し被塗装物等への不要な付着を避けるために室内の空気を常に吸引排気処理しているが、その排気のために室内の空調した空気が排気され、膨大なエネルギー損失になっている。塗料ミストの飛散する領域を限定し、ミスト捕集に必要な排気量を削減す。
【解決手段】
塗装室内に配置した被塗装物に対し、塗装ロボットに搭載されて作動するスプレーガンで塗装するにあたり、搬送装置のホルダーに載置された被塗装物の塗装面を、スプレーガンを移動させる代わりに、ホルダー側を前後や回転移動さらには傾斜移動等の手段で制御し塗装を行う。スプレーガンの操作信号と搬送装置のホルダーの駆動とは塗装ロボットの制御装置により任意の設定位置で相互に連動させることで、スプレーガンの吹付けを排気装置に向けて集中させ、小さく排気量の少ない塗装室での塗装が可能となる。
(もっと読む)
少量排気スプレー塗装処理装置
【課題】
塗装室に吸引されて外部へ排気される空調空気量を削減し、工業的に経済的で、環境保全の側面からも、少ない排気量で可能な塗装室を得ることを目的とし、特に大形の被塗装物であっても少ない排気で塗装を可能とする小形の塗装室を実現する。
【解決手段】
排気装置を備えた塗装室と、予め記憶され設定された作動信号により繰り返し作動を行う塗装ロボットを一体的に塗装ユニットとして構成し、この塗装ユニットを、前記塗装室内を通過する被塗装物に対して必要な塗装位置になるよう制御可能な移動手段によって往復動可能にする。制御手段はサーボアクチュエータ等で塗装ロボットの作動制御と連動させ限定された範囲での塗装を行い、塗装位置に追随する小形の塗装室での塗装を可能とする。
(もっと読む)
フラックス塗布システム
【課題】 1つの噴霧式フラックス塗布装置で、多種類のフラックス塗布方法を実現できるようにすること。
【解決手段】プリント配線板1にフラックスを塗布する噴霧ノズル22を有するフラックス塗布手段18と、水平面における任意の位置に任意の向きでプリント配線板を位置させるロボット搬送手段3と、ロボット搬送手段3によるプリント配線板1の位置と向きで規定されるプリント配線板1の搬送軌跡を制御する制御手段42とを備え、制御手段42によって、プリント配線板1をロボット搬送手段3でフラックス塗布手段18において搬送する場合に水平面における直交する座標の一方の座標での往復移動と他方の座標での直進移動と水平面における向きを組み合わせた搬送軌跡に制御する。
(もっと読む)
粉末塗布ブース用自動修整装置
本発明は、特に噴霧ブース(3)用の自動修整作業のための部品(5)に粉末の形態の塗布製品を噴霧するのに用いられる装置(17)に関する。本発明は、本質的に垂直な柱状体(18)と、柱状体(18)の全長に沿って本質的に垂直に独立して動くことのできる少なくとも二つのキャリッジ(19)と、キャリッジ(19)で支持され、塗布製品を供給するガン(10)とを有することを特徴としている。本発明は、塗布製品の自動塗布に対して補足的な仕方で行われる部品の自動修整又は予調整に適している。 (もっと読む)
パターン形成装置、パターン形成方法
【課題】高精度かつ安定的にパターン形成を行い、歩留まりを向上させることを可能とするパターン形成装置等を提供する。
【解決手段】パターン形成装置1は、BM、基板側ステージ3、ヘッド側ステージ5の位置を計測し、計測した位置データに基づいて、標準塗布データ41に補正処理を施して補正塗布データ43を作成し、当該補正塗布データ43に基づいて、インク吐出タイミング(吐出開始、吐出終了)を制御し、基板側ステージ3とヘッド側ステージ5との間の相対位置を制御する。また、パターン形成装置1は、基板上の白欠陥、黒欠陥、突起等の欠陥の有無及び位置を検出し、追加塗布データ45を作成し、当該追加塗布データ45に基づいて、欠陥箇所に追加塗布を行う。
(もっと読む)
塗布ロボット
【課題】 部品の表面あるいは裏面に塗料、接着剤あるいはシール剤を塗布する塗布ロボットを提供する。
【解決手段】 モータにより駆動されて塗布剤の瞬時吐出量を制御する塗布装置5をロボット先端に取付けるとともに、塗布開始ポイントから塗布終了ポイントまでのロボット先端の速度パターンに沿って塗布剤の瞬時吐出量を制御するように構成する一方、塗布装置5の高さ位置のオフセット量を記憶しておき、塗布装置5の先端と塗布剤の上面との間隔が所定間隔となるように塗布装置5の高さ位置を補正するように構成されている。そのため、ロボットの速度が変わったり、塗布剤の最大瞬間吐出量が変わって、塗布剤の高さが変わっても、塗布剤の塗布状態を常にきれいに保持できる。
(もっと読む)
塗装システム
【課題】塗料ポンプの制御を工夫し、制御データの最適化に要する時間を極力短縮する。
【解決手段】ロボット制御盤30は、制御用塗装パスデータに基づいて、ロボット31を制御する。これによって、制御用塗装パスデータに基づく塗装パスに沿って塗装機42が移動することになる。一方、吐出制御盤40は、制御用吐出制御データに基づいて、シリンダポンプ41を制御する。これによって、制御用吐出制御データに基づく塗料の吐出が塗装機42で実現される。ここで、ロボット制御盤30による制御開始からカウントされる時間情報に基づいて、吐出制御盤40がシリンダポンプ41を制御する。つまり、シリンダポンプ41の制御がタイマ制御とし、吐出制御データを、塗装パスデータから独立させる。
(もっと読む)
薄膜塗布方法及びその制御装置
【課題】 基板周縁部ではノズルによる薬液の噴霧密度を低くして塗布することによって、基板全面に亘って膜厚が均一な薄膜の塗布を可能にしようとする薄膜塗布方法及びその制御装置を提供することである。
【解決手段】 薬液を噴霧するノズル1と基板2とを相対移動させて該基板2の表面に薄膜を塗布する方法であって、上記薬液の基板2面に対する噴霧密度が、上記基板2の中心部よりも周縁部2a〜2dで低くなるようにして塗布するようにしたものである。これにより、基板2の周縁端部2aから2dにおける薄膜の盛り上がりを抑制し、基板全面に亘って膜厚の均一化を図ることができる。
(もっと読む)
1 - 16 / 16
[ Back to top ]