
Fターム[5B050EA28]の内容
イメージ処理・作成 (84,044) | 画像処理 (22,430) | 3次元画像、図形の処理 (3,813) | 曲面、3次元形状記述、生成 (1,034)
Fターム[5B050EA28]に分類される特許
261 - 280 / 1,034
三次元曲線化方法及びシステム
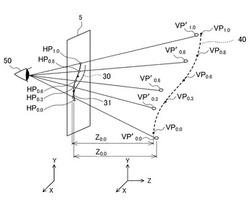
【課題】ユーザによって二次元空間で入力された曲線を、三次元空間の立体の形状に沿って対応付けることができる方法及びシステムを提供すること。
【解決手段】三次元曲線化システム100は、三次元空間の曲線を構成する点の位置データと、Zバッファ値とを対応付けて予め記憶する既存曲線記憶部22と、ユーザによって表示平面に入力された二次元空間の曲線である入力曲線を受け付ける入力受付手段11とを備える。そして、三次元曲線化システム100は、受け付けた入力曲線31と、既存曲線記憶部22に記憶された三次元空間の曲線である既存曲線40とのパラメータ化を行い、パラメータ化によって、既存曲線40を構成する既存点に対応付けられた、入力曲線31を構成する入力点を求め、既存点のZバッファ値を取得し、入力点と、取得したZバッファ値とを対応付けて、三次元空間の新たな曲線41を構成する新規点を作成する。
(もっと読む)
メッシュ切断方法、ミラーリング方法、メッシュ切断システム及びミラーリングシステム

【課題】メッシュ切断方法、メッシュ切断方法を用いたミラーリング方法、メッシュ切断システム及びミラーリングシステムを提供する。
【解決手段】複数のメッシュから構成された三次元の立体形状を直線状に切断するメッシュ切断方法は、立体形状のメッシュの上に切断線を引き、切断線がメッシュのメッシュ頂点を通過する場合に、切断線が通過するメッシュ頂点を交錯頂点リストに記憶し、切断線がメッシュのエッジと交錯する場合に、切断線と交錯するエッジを交錯エッジリストに記憶し、交錯エッジリストに記憶したエッジを構成するメッシュに対して分断形状処理によりそのメッシュを切断し、交錯頂点リストに記憶したメッシュ頂点に対して1隣接頂点が交錯頂点リストに記憶されている場合に、メッシュ頂点とその1隣接頂点との間の線分上を切断する。
(もっと読む)
作業訓練システム及び作業訓練方法並びに該作業訓練方法を記録した記録媒体
【課題】ヘッドマウントディスプレイ装置に仮想車両と仮想部品とを作業者の移動に対応して移動表示させることで、実作業に即した訓練を行う作業訓練システムを提供する。
【解決手段】作業解析部41は、タクトタイムに応じて仮想車両の3次元モデルが生産ライン上で流れているようにヘッドマウントディスプレイ装置31に表示させる第1の表示機能と、データ記憶部に登録された標準作業軌跡データに基づき標準作業軌跡をタクトタイムに応じて生産ライン上で流れているようにディスプレイ画面上に表示されている仮想車両の3次元モデルに対応して当該ディスプレイ画面上に表示させる第2の表示機能と、モーションキャプチャ装置から受信する3次元座標データに基づき作成した作業軌跡データと標準作業軌跡データとを比較して、設定された閾値内の場合には部品の組み付けが正常終了したものと判定する部品組付判定機能とを有する。
(もっと読む)
適応的にサンプリングされる距離場を用いて数値制御フライス加工をシミュレートするための方法
【課題】高精度に時間効率よくフライス加工をシミュレーションする。
【解決手段】物体を横切る経路に沿って或る形状を動かすことによって、その物体のフライス加工をシミュレートするための、プロセッサ上で実行される方法が提供される。物体を表現するために、複合的な適応的にサンプリングされる距離場(ADF)が生成され、その複合ADFは1組のセルを含む。複合ADF内の各セルは1組の距離場と、そのセル内の物体を再構成するための手続き型再構成法とを含む。形状は形状距離場によって表される。経路はパラメトリック関数によって表される。掃引容積再構成法に従って、経路に沿って形状を動かすことによって生成される掃引容積を表すために、掃引容積距離場が連続的に定義され、その掃引容積再構成法によって、サンプル点における掃引容積距離場が再構成される。複合ADFを編集して、掃引容積距離場を複合ADFに組み込み、シミュレートする。
(もっと読む)
平滑化処理方法及び平滑化処理システム
【課題】ポリラインを修正すると共にポリラインの周辺の修理を行う平滑化処理方法及び平滑化処理システムを提供する。
【解決手段】コンピュータによって、メッシュにより形成された三次元の立体形状30を平滑に処理する立体形状30の平滑化処理方法は、デジタイザからの入力に基づいて決定された立体形状30に配置されたメッシュ上線31の形状を平滑にして、平滑にしたポリライン35の周囲形状追従変形対象領域37に配置されたメッシュに対して追従処理を実行して、そのメッシュ形状を修正する。
(もっと読む)
位置姿勢推定方法および装置
【課題】3次元モデルデータの表面情報を実写画像を用いて更新するにおいて、不適格な実写画像を用いた更新を防止し、安定した位置姿勢の推定を可能にする。
【解決手段】撮像装置によって観察対象物体を撮像して得られた実写画像を取得するとともに、観察対象物体の形状及び表面情報を表す3次元モデルデータと撮像装置の位置姿勢情報とに基づいて3次元モデルを画像平面上に描画することにより描画画像を生成する。そして、生成された描画画像と、実写画像における観察対象物体の画像との対応を検出することにより、撮像装置と観察対象物体の相対的な位置姿勢を算出する。また、算出された位置姿勢に基づいて実写画像における観察対象物体の画像情報を3次元モデルデータの表面情報に対応付けることにより、表面情報が更新される。ここで、表面情報を更新するのに実写画像が適しているか否かが判断され、上記更新を実行するか否かが決定される。
(もっと読む)
部品管理方法、装置、プログラム、記録媒体
【課題】本発明の課題は、撮影条件に制約を受けずに撮影された画像を用いて特定した部品の情報を管理する方法を提供することである。
【解決手段】携帯端末装置が、電子カメラにより、部品に対して所定の位置関係に配置されたマーカーと共に、部品を撮影して、部品管理装置に撮影画像データを送信する部品撮影ステップと、部品管理装置が、撮影画像データからマーカー画像を検出して、標準マーカーの形状情報を用いて、座標変換行列を算出して、これを三次元CADデータに対して適用して、部品CG画像を生成する部品CG画像生成ステップと、部品管理装置が、部品CG画像と撮影画像データの部品画像を比較して類似度を算出して、高い類似度の部品CG画像の部品データを用いて部品情報画面データを作成して携帯端末装置に返信する部品情報画面作成返信ステップと、を含んだ手順でなされることを特徴とする交換部品管理方法である。
(もっと読む)
ゲーム装置及びゲームプログラム
【課題】多様なオブジェクトの動作を実現しつつ、モーションデータのデータ量及びその作成コストを削減することが可能なゲーム装置及びゲームプログラムを提供する。
【解決手段】ゲーム装置は、プレイヤキャラクタの腰Wが移動する軌道WPと、足首Parが移動する楕円軌道ArPとを設定する。プレイヤキャラクタがゲーム空間を移動すると、その移動量に応じて、腰が軌道WP上を移動し、足首が楕円軌道ArP上を移動する。この場合において、足首が楕円軌道ArP上を1周する間、腰は軌道WP上を2往復する。これにより、足の動きに応じたモーション画像を予め用意する必要がなく、プレイヤキャラクタの多様な足の動きを実現することができる。
(もっと読む)
階層的可逆圧縮
【解決手段】
データ圧縮のための方法が提供される。データ圧縮方法は、データのスクエアをデータのタイルへと変形する。データのタイルは次いでデータの複数のクワッドに分割され、データの複数のクワッドは、表現要素、第1のデルタ要素、第2のデルタ要素、第3のデルタ要素、及び制御ワードへと変換される。データの新たなタイルが次いで複数の表現要素を伴って形成され、そしてプロセスは単一の表現要素が残るまで繰り返される。単一の表現要素は次いで制御ワード及び対応するデルタ要素と共に出力ストリーム内に埋め込まれる。ビットストリームが構文解析されたならば、データの復元は符号化に対して対称である。
(もっと読む)
位置姿勢推定装置及び方法
【課題】実環境中に光源変化が発生した場合や、対象物体の姿勢変化による見えの変化が発生した場合でも、安定的な位置姿勢推定を実現可能とする。
【解決手段】位置姿勢推定装置は、撮像装置によって観察対象物体を撮像して得られた実写画像と、前記観察対象物体の形状及び表面情報を表す3次元モデルデータと撮像装置の位置姿勢情報とに基づいて3次元モデルを画像平面上に投影することにより生成された描画画像との対応を検出することにより、撮像装置と観察対象物体の相対的な位置姿勢を算出する。そして、算出された位置姿勢に基づいて実写画像における観察対象物体の画像情報を当該3次元モデルデータの表面情報に対応付けることにより、その表面情報が更新される。
(もっと読む)
三次元道路中心線データの生成方法およびその装置
【課題】三次元走行軌跡をもとに三次元道路中心線データを自動生成する。
【解決手段】道路走行時に取得した位置センサの走行軌跡を、平面線形として生成された平面走行軌跡から、制御点検出手段は制御点を検出し、平面線形の生成において円弧検出手段が制御点に関連して円弧を検出し、縦断線形の生成においては放物線検出手段が放物線に近似させた円弧を検出し、平面線形の生成においては緩和曲線検出手段が円弧につながる緩和曲線を検出し、直線検出手段は前記検出した制御点、円弧、緩和曲線から直線を検出するから、これらの制御点、円弧、緩和曲線、直線をつないだ線を平面線形、縦断線形の中心線として滑らかに生成することができる。
(もっと読む)
画像情報処理装置、撮像装置、画像情報処理方法およびプログラム
【課題】立体視コンテンツのシーンの切替えにおいて奥行値を滑らかに遷移させる。
【解決手段】チャプタ#iの終端部分の奥行値711とチャプタ#(i+1)の開始部分の奥行値714との間で急激な変化がある場合には、チャプタ#iとチャプタ#(i+1)の切替えの際に全体の奥行値を一旦ゼロ(無限遠)に補正する。その際、例えば0.5秒以上の期間をかけて奥行値を遷移させる。チャプタ#iの終端部分における元々の奥行値721から終端フレームの奥行値722がゼロになるように順次遷移させる。同様に、チャプタ#(i+1)の開始フレームの奥行値723をゼロとして、開始部分における元々の奥行値724まで順次遷移させる。
(もっと読む)
三次元計測用画像撮影装置及びその方法
【課題】撮影の進捗状況を把握でき、撮影を過不足なく効率的に行なえる三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1は、測定対象物2を単カメラにより撮影する装置で、撮影画像を取得する撮影部3、撮影画像から特徴点を抽出する特徴点抽出部61、撮影画像を3以上の特徴点で囲まれた撮影領域に区分する撮影領域区分部81、区分された撮影画像を記憶する撮影領域画像記憶部54、特徴点の三次元座標を求める三次元位置測定部7、測定対象物2の撮影範囲を三次元空間に表現する撮影範囲画像に各特徴点を書き込み、これらの特徴点を結線して撮影領域に区画する撮影範囲画像形成部85、撮影不足領域の有無を判定する撮影不足領域判定部86、撮影範囲画像を表示する表示部4を備える。
(もっと読む)
ワークモデル作成方法
【課題】間引いた後の残された点群で、製品の加工精度検証や、凝固・熱収縮等の歪等の物理的現象をシミュレートしても、正しく物理的現象を再現できるようにする。
【解決手段】点群で形成される製品モデルと、面で形成される理想ワークのモデルとを、コンピュータの三次元仮想空間上で比較して、前記実計測した点毎に、前記理想ワークのモデル上にあって、且つ、前記実計測した点に対応する点を基準に、前記実計測した前記点の前記基準からの差異を求め、同じ差異の点を結ぶ仮想の等差異線であって、且つ、隣接する等差異線の差異から任意の幅だけ違った差異の等差異線を想定し、想定された等差異線毎に、その線上にあって、隣り合う距離が点選択距離である点群を選択する。前記製品を構成する点群を、前記点選択ステップで選択された点群に置き換え、点群が置き換えられたワークモデルを記憶媒体に記憶する。
(もっと読む)
医用画像管理装置および方法
【課題】疑似3次元画像を初めから作って用意しておくことができ、どの外部端末からの配信要求に対してもすぐに擬似3次元画像データを提供できる。
【解決手段】医用画像撮影装置により取得された画像を管理する医用画像管理装置であって、医用画像撮影装置により取得された多数の2次元画像の群からなる3次元画像を2次元平面上に立体的に可視化した1または複数の擬似3次元画像を、予め決めておいた画像生成条件により生成する画像生成手段と、画像生成手段により生成された疑似3次元画像を記録する記録手段と、外部端末からの3次元画像に対する配信要求に応じて、生成された疑似3次元画像の少なくとも1枚を記録手段から外部端末に配信する配信制御手段とを備えた医用画像管理装置を提供する。
(もっと読む)
画像処理装置およびその方法
【課題】 三次元物体の形状と、三次元物体に投影された画像の観察位置を考慮した画像処理を行う。
【解決手段】 画像を投影する三次元物体の形状情報、三次元物体に投影される画像の観察位置を示す観察位置情報、および、三次元物体に画像を投影する画像投影装置の位置を示す装置位置情報を入力する(S11〜S13)。そして、観察位置情報および形状情報に基づき、形状情報を表現する各ポリゴンの向きと観察位置の関係を示す観察角度を算出し(S14)、観察角度、形状情報および装置位置情報に基づき、画像投影装置に出力する画像を補正する(S15〜S17)。
(もっと読む)
モーションキャプチャにモデルトラッキングを適用するための方法及びシステム
シーンの立体画像などの画像が、装置によって受信され得、観察され得、又はキャプチャされ得、ユーザーのモデルが画像内に生成され得る。その後、モデルは、ユーザーによる1つ以上の動作を模倣するように調整され得る。例えば、モデルは、物理空間におけるユーザーの動作に相当するポーズに調整され得る関節と骨を有する骨格モデルであり得る。ユーザーの動作に関するモーションキャプチャファイルが、調整されたモデルに基づいて、リアルタイムに生成され得る。例えば、調整されたモデルのポーズそれぞれに関する関節と骨を定義しているベクトル集合が、キャプチャされ得、モーションキャプチャファイルにレンダリングされ得る。 (もっと読む)
画像処理装置及びプログラム
【課題】現実空間で取得した少量のデータを基に、仮想空間で膨大な数の画像を生成し、画像内の人を認識するための認識データベースを構築する。
【解決手段】人の3次元形状データを取得して人の関節モデルに当てはめ、仮想空間に人体モデルを作成して、関節モデルの各関節の動きに合わせて人体モデルの各関節を動かす。ノイズ生成処理部11により、人体モデルに現実空間の差異に応じたノイズを付加して動作や体格の個人差を生成し、画像生成処理部13により、設定された撮影条件に基づき人体モデルから画像を生成する。画像特徴算出処理部14により、生成した画像から画像内の人の画像特徴を算出し、画像特徴を機械学習部15により機械学習して画像内の人を認識するための認識データベース54を構築する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】3次元仮想空間上に構築した対象の特徴量と、実空間で対象を撮影して生成した画像の特徴量とを比較して対象を認識するときに、1枚の輝度画像のみで精度の高い認識を可能にする。
【解決手段】シーン設定処理部11は、データベース2に保存されている3次元モデルのシーンを設定し、画像生成処理部12は、設定されたシーン毎に距離画像及び輝度画像を生成する。画像特徴算出処理部13は、距離画像の特徴量及び輝度画像の特徴量を算出する。距離/輝度画像特徴量の相関係数算出処理部14は、距離画像の特徴量と輝度画像の特徴量との間の相関係数を算出し、輝度→距離画像特徴変換式構築処理部15は、相関性の高い部分を用いて、輝度画像の特徴量を距離画像の特徴量に変換する変換テーブルを作成する。
(もっと読む)
各シンボルが三つ以上の可能なシンボル値のうちの一つをもちうる場合のシンボル・シーケンスのエンコードおよびデコードの方法および装置
シンボル・シーケンスを圧縮する方法であって、各シンボルは三つ以上の可能なシンボル値のうちの一つをもち、当該方法は、最も高頻度のシンボル値のシンボルの第一のランおよび二番目に最も高頻度のシンボル値のシンボルの第二のランを含むラン対のそれぞれを、前記三つ以上の可能なシンボル値に含まれないさらなるシンボル値によって置換することによって前記シンボル・シーケンスを修正する段階と、すべての置換されたラン対を含む二値シーケンスを生成する段階と、前記二値シーケンスおよび前記修正されたシンボル・シーケンスを圧縮エンコードする段階とを含む、方法。 (もっと読む)
261 - 280 / 1,034
[ Back to top ]