
Fターム[5B050EA28]の内容
イメージ処理・作成 (84,044) | 画像処理 (22,430) | 3次元画像、図形の処理 (3,813) | 曲面、3次元形状記述、生成 (1,034)
Fターム[5B050EA28]に分類される特許
221 - 240 / 1,034
三次元アニメーションの表示装置及びその表示装置を実現するためのプログラム
【課題】透視投影法による三次元アニメーションの表示において、仮想カメラと物体との距離が近接しすぎた場合の当該物体によって隠れる後方の物体等を見易くする。
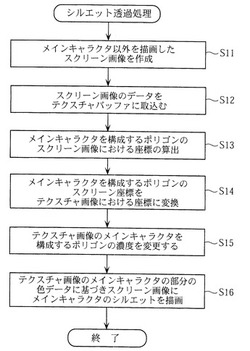
【解決手段】透視投影法による三次元アニメーションの表示方法において、仮想カメラと物体(メインキャラクタ)との距離が所定の距離以下に近接した場合、シルエット透過処理を行う。シルエット透過処理では、物体を除いた透視投影法による二次元画像が作成され(S11)、モニタの画面上における物体の表示位置が算出される(S13)。そして、ステップS11で作成された二次元画像の、ステップS13で算出されたモニタの画面内の物体の表示位置に含まれる画素に対して、各画素の濃度が所定の割合で変更され(S14)、その二次元画像がモニタに表示される(S15)。これにより、物体はシルエットだけが表示される。
(もっと読む)
顔の特徴をアニメーション化する方法およびシステムならびに表情変換のための方法およびシステム

【課題】顔の特徴を正確にアニメーション化し、顔の表情を変換するための方法およびシステムを提供する。
【解決手段】コードブックは、第1人物の顔表情集合を定義しているデータを収めている。第2人物からの顔トレーニング表情集合およびコードブックからの対応する表情は変換関数を導き出すために使用され、この変換関数はコードブックの表情のすべてに適用されるようになっている。このようにして、第1人物からの表情は、第2人物の表情にリアル感をもって変換すること、およびその逆に変換することを可能にしている。多数の異なる顔を適合させる操作の基礎として使用される、単一共通汎用顔モデルが用意されている。この単一共通汎用顔モデルとユーザが定義したある種の制約を使用することにより、異なる顔間の対応付けを可能にするメカニズムが得らる。これらの変換処理は処理ユニット132で実行される。
(もっと読む)
GISの使用方法
【課題】GISを用いて、トンネルのコンクリート覆工の変状を管理し、諸々の解析を容易にできるようにすること。
【解決手段】主題図情報の位置情報に図形情報及び属性情報を関連付けて登録するデーターベース機能と、データーベース機能によって登録された情報に基づいて所望の情報を検索及び解析する空間解析機能と、データーベース機能によって登録された情報及び空間解析機能で検索及び解析した情報を表示する視覚化機能とを備えるGISにおいて、
主題図情報にトンネル内面展開図を用い、図形情報には変状図情報を用い、変状図情報にはポイントデータとポリラインデータとポリゴンデータのうち少なくとも一つを用いることを特徴とするGISの使用方法。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】予め背景画像を撮影することなく、指定された物体を画像内から消去すること。
【解決手段】物体の外観の特徴を表す特徴データを記憶しているデータ記憶部と、撮像装置を用いて実空間を撮影することにより得られる入力画像、及び前記データ記憶部により記憶されている前記特徴データに基づいて、前記実空間内に存在する1つ以上の物体の位置を表現する環境マップを生成する環境マップ生成部と、前記入力画像内に写っている物体のうち指定された消去対象物体の前記環境マップ内における位置、及び前記撮像装置の位置に基づいて、前記入力画像から前記消去対象物体が消去された出力画像を生成する出力画像生成部と、を備える画像処理装置を提供する。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
画像表示装置及び方法並びにプログラム
【課題】鑑賞者に現実感のある自然な画像の提示を可能にする画像表示装置を提供すること。
【解決手段】装置の撮影部22は、表示部21を視認する鑑賞者11が存在し得る場所の画像を撮影する。装置は、その撮影画像から鑑賞者11の顔を検出する。装置は、検出された顔の顔位置と、光源12の光源位置とをそれぞれ決定する。装置は、顔位置及び光源位置に基づいて、表示画像(時計のオブジェクト31を含む画像)の中から反射領域61を検出する。次に、装置は、反射領域61に対して反射効果を付加する画像処理を、表示画像のデータに対して実行する。そして、装置は、当該画像処理後のデータが表わす表示画像を表示部21に表示させる。
(もっと読む)
3次元形状表示装置およびプログラム
【課題】3次元モデル毎に保持しなければならないモデル数を削減し、重視すべき任意の特徴を残しながらモデルの簡略化を行うことのできる3次元形状表示装置を得る。
【解決手段】視点情報が変更された場合、距離計算部3は3次元モデルから視点までの距離を計算する。設備詳細度決定部4は、距離計算部3で計算された距離に応じた設備詳細度を決定する。データ管理部6に設備詳細度に対応した簡略化モデルが格納されていない場合、簡略化モデル作成部5は、3次元モデルに対する推奨観測方向からの平行光線に照らされる領域と平行光線に照らされない領域に領域分割し、平行光線に照らされる領域の詳細度が平行光線に照らされない領域よりも高くなるよう部分詳細度を与えて簡略化モデルを作成する。
(もっと読む)
三次元画像表示プログラム、三次元画像表示機能を備えた携帯電話機等の携帯デバイス、及び三次元画像の表示方法
【課題】 携帯電話機等の携帯デバイスのディスプレイに、ディスプレイを仮想透視した三次元画像を表示する三次元画像表示プログラム等を提供する。
【解決手段】 地図情報サーバから携帯デバイスの周囲にある表示対象物のGPS情報を取得し、携帯デバイスのGPS情報を基準にした各々の対象物の相対座標を三次元データとして記憶する。この対象物の位置を示す三次元データを、三軸の加速度値と方位値から把握される携帯デバイスの姿勢に対応して変換するが、併せて、携帯デバイスのディスプレイに垂直な軸の加速度からディスプレイの地面に対する傾きを把握し、これに対応して対象物に対するユーザの視点を上方に移動させ、三次元データを変換することによって、ディスプレイを地面の方向に傾けた場合の視野を拡大する。携帯デバイスの姿勢をクォータニオンで表すことによって、姿勢の変化の判定や、画像を変化させる際の補間にかかる演算を効率化する。
(もっと読む)
画像処理プログラムおよびコンピュータ読み取り可能な記録媒体
【課題】簡易な処理により、雨で濡れた路面等により周囲の景色が反射して見える画像を生成する。
【解決手段】仮想視点を基準とした視錐台の内部に配置されたオブジェクトを投影平面に投影する座標変換手段、前記オブジェクトの色情報および深度情報をメモリに保持する保持手段、前記反射オブジェクト上のピクセルの処理に際し、当該ピクセルに対応する前記反射オブジェクトの法線値および座標値を算出する計算手段、前記座標値を始点とする反射線分を仮想空間内に求める反射線分計算手段、前記視錐台内で、前記反射線分が前記オブジェクトと交差する交差座標があるか否かを判定する交差判定手段、前記交差座標があると判定した場合、前記保持された当該被反射ピクセルの色情報を前記ピクセルの色情報に反映し、前記交差座標がないと判定した場合、所定の色情報を前記ピクセルの色情報に反映するピクセル色反映手段として機能させる。
(もっと読む)
画像処理装置、画像処理方法、ならびに、プログラム
【課題】仮想空間に配置される複数のポリゴンからなるオブジェクトを分割した様子を表す画像を生成する画像処理装置等を提供する。
【解決手段】画像処理装置801において、記憶部802にはオブジェクトの基本姿勢におけるボーン、制御点、グループの情報が記憶され、ボーン移動部803がボーンの移動先を求め、制御点移動部804がボーンの移動に付随して制御点の移動先を求め、配置部805は制御点が属するグループの基準位置等に基づいて頂点の位置を求めて頂点を結ぶポリゴンを仮想空間に配置し、選択部806は分割面と交差するポリゴンを選択し、分割部807は選択されたポリゴンの辺を分割面が内分する内分比に基づいて、記憶部802の制御点、グループの情報を必要最小限だけ書き換え、グループ移動部809は各グループの基準位置等を移動し、生成部808は仮想空間に配置されたポリゴンの様子を表す画像を生成する。
(もっと読む)
画像処理装置、処理方法、ならびに、プログラム
【課題】移動体の動きに応じた視覚効果を付与するのに好適な画像処理装置等を提供する。
【解決手段】画像処理装置200は設定部201、移動部202、予測部203、生成部204を備え、以下のように構成する。設定部201は、仮想空間内に配置される視点位置及び視線方向を設定する。移動部202は、仮想空間内で第1のオブジェクトを移動させる。予測部203は、第1のオブジェクトが仮想空間内に配置される第2のオブジェクトと接触する接触位置を予測する。生成部204は、視点位置から視線方向へ仮想空間を見た様子を表わす画像を生成する。また、設定部201は、生成された画像に第1のオブジェクトが描画されるように視点位置及び視線方向を設定し、設定部201は、第1のオブジェクトと接触位置との距離が第1の閾距離より大きい間、視線方向を第1のオブジェクトが移動する方向に設定する。
(もっと読む)
画像処理装置およびプログラム
【課題】目視によるブレードの確認が容易になる画像処理装置およびプログラムを提供する。
【解決手段】CPU34cは、ジェットエンジン内に周期的に配置されたブレードを撮像した動画像を構成するブレード画像からテンプレート画像を抽出し、ブレード画像とテンプレート画像とを比較する。続いて、CPU34cは、ブレード画像の中から、画像比較の結果に基づいて一部のブレード画像を選択する。モニタ22は、テンプレート画像と、選択されたブレード画像とを表示する。
(もっと読む)
ゲーム装置、ゲーム処理方法、ならびに、プログラム
【課題】プレイヤーの指示対象となるキャラクターが移動する様子をプレイヤーに把握しやすくする。
【解決手段】仮想空間内には、キャラクターに対する相対的な位置が固定される視点が設定される。ゲーム装置200において、視線方向設定部201は、仮想空間内における視線の方向を設定する。画像生成部202は、設定される視点の位置から、設定される視線の方向へ、仮想空間を見た様子を表す画像を生成する。経路取得部203は、キャラクターの状態が準備モードである間、キャラクターの現在位置から目標点を移動し、目標点が移動した経路を取得する。移動部204は、キャラクターの状態が移動モードである間、取得された経路に沿ってキャラクターを目標点まで移動する。視線方向設定部201は、キャラクターの状態が準備モードである間、視点の位置から目標点の位置への方向に、視線の方向を設定する。
(もっと読む)
画像生成装置、画像生成方法、ならびに、プログラム
【課題】仮想空間に配置される特定のオブジェクトを分かり易く表現する画像を生成する。
【解決手段】決定部201は、仮想空間に配置される視点と投影面との組を決定する。判定部202は、仮想空間に配置される複数のオブジェクトのそれぞれについて、当該オブジェクトが、決定部201により決定された組の視点から見て、当該決定された組の投影面に重なるか否かを判定する。生成部203は、決定部201により決定された組の投影面に重なると判定されたオブジェクトから、当該組の視点と当該オブジェクトとの距離に基づいて、描画対象のオブジェクトを選択し、当該選択された描画対象のオブジェクトを、決定部201により決定された組の視点から見た様子を表す画像を生成する。
(もっと読む)
立体画像生成装置
【課題】立体画像に対してより立体感を出せ、水系を容易にたどれる視覚化立体地図を得る。
【解決手段】DEMデータ作成部6と、DEM読込間隔設定部7と、パラメータ計算部8と、立体赤色マップ作成部20と、傾斜画像階調補正部22と、地上開度画像階調補正部23と、地下開度画像階調補正部21と、L*チャンネル化部26と、b*チャンネル化部25と、a*チャンネル化部27と、L*a*b*カラー式画像化部と、階調補正部29と、XYZ表色系変換部と、RGB表色系変換部31と、合成部32と、微調補正部33、傾斜スペクトラム算出部52と、地下開度スペクトラム算出部51と、地上開度スペクトラム算出部53等を備えて、画像を地下開度が高い谷や窪地をシアン色に、地上開度の大きい尾根や頂上を赤色に調整し、この地上開度−地下開度調整画像を、赤色立体地図と重ねあわせ合成することによって画像(KLi)を得る。
(もっと読む)
センサフュージョンによる地図の自動生成、およびそのように自動生成された地図を用いて移動体の移動をするための、装置、方法、ならびにプログラム
【課題】精度の高い環境地図を作成しつつ、同期的に移動体のその環境内での移動に反映する。
【解決手段】環境を表す地図を用いて状態推定をして移動する移動体を制御する装置であり、地図を格納する記憶手段と、移動体の状態推定データの初期値を設定し更新する状態推定データ格納・処理手段と、測定点を環境内に設定し状態推定データから得た移動体の位置と測定点との位置関係を測定した測距データを得る測距手段と、環境の一部を画像データとして得る画像取込手段と、測距データと画像データを対応づけた合成データの残差を計算する残差算出手段と、移動体の移動量を出力する移動手段とを含み、状態推定データ格納・処理手段が移動手段の出力と残差とで状態推定データを更新し、測距手段が測距データで地図を更新し、移動手段が更新された状態推定データと地図とで移動体の移動を調節する装置。
(もっと読む)
拡張現実感を用いた3Dオブジェクト生成CADシステム
【課題】拡張現実感の技術を用いて、インタラクティブで直感的に3Dオブジェクトを生成できるCADシステムを提供する。
【解決手段】撮影手段が複数のWebカメラ1からなり、描画手段がペンタブレット3からなり、表示手段が薄型ディスプレイ2からなり、マーカが薄型ディスプレイ2を支持する平面台11上に設けた基準マーカ6と、薄型ディスプレイ2上に設けた描画マーカ7からなり、薄型ディスプレイ2は自在アーム5に取り付けられており、ペンタブレット3上で描かれた閉曲線8を薄型ディスプレイ2に表示し、映像表示された閉曲線9をWebカメラ1で捉え、認識させながら、自在アーム5で薄型ディスプレイ2を移動することにより、映像表示された閉曲線9を輪郭とする3Dオブジェクト10を生成することを特徴とする拡張現実感を用いた3Dオブジェクト生成CADシステム。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】差分を正確に検出できるようにする。
【解決手段】基軸22が設定されている。三次元形状11と三次元形状12の差分が測量されるとき、この基軸22方向での差分が測量される。例えば、三次元形状11上の所定の点として点15が選択されたとする。点15に対して、基軸22方向にあり、三次元形状12上の点は、点21となる。よってこの場合、点15と21の差分が差分値として算出される。異なる視点13や視点14であっても、三次元形状11と三次元形状12の差分は、点15と点21との差分となるため、異なる視点で異なる差分値になるといったことを防ぐことが可能となり、正確な差分を検出することができる。本発明は、形状差分を検出する装置に適用できる。
(もっと読む)
画像生成装置、画像生成方法、ならびに、プログラム
【課題】互いに繋がったオブジェクトの動きをより自然に且つ簡単に表現する。
【解決手段】仮想空間には、互いに連結点で連結される第1オブジェクトと第2オブジェクトが配置される。画像生成装置200において、記憶部201は、第1オブジェクトの位置及び向きと、第2オブジェクトの位置及び向きと、を記憶する。移動部202は、第1オブジェクトの位置及び/又は向きを移動する。また、移動部202は、第1オブジェクトに対して相対的に固定され、且つ、第1オブジェクトと交差しない移動可能領域に、第2オブジェクトの端点の位置が含まれるように、第2オブジェクトの位置及び/又は向きを移動する。生成部203は、第1オブジェクトと第2オブジェクトを表す画像を生成する。
(もっと読む)
立体映像インタラクティブシステム
【課題】立体映像インタラクティブシステムの提供。
【解決手段】立体映像インタラクティブシステムは、立体映像キャプチャモジュール、立体映像処理ユニット、ホストマシンと立体映像表示モジュールで構成される。立体映像表示モジュールが立体映像を表示する時、立体映像キャプチャモジュールが操作体の動作映像を取得した後、該立体映像処理ユニットが動作特徴を取得し、中央処理装置に伝送し、該中央処理装置は該動作特徴においてのリアルタイム動作を計算し、立体映像表示モジュールが表示する立体映像が動作特徴により対応する変化を発生し、これにより、実体空間中での仮想の立体映像を表示し、且つ操作体が直接立体映像上でリアルタイムのインタラクティビティを実行できる。このほか、表示する立体映像が立体映像キャプチャモジュールが撮影した第1立体映像由来か、或いはホストマシン内部の保存ユニットに予め保存された第2立体映像由来とされる。
(もっと読む)
221 - 240 / 1,034
[ Back to top ]