
Fターム[5B057AA01]の内容
Fターム[5B057AA01]の下位に属するFターム
物流、搬送品 (951)
Fターム[5B057AA01]に分類される特許
61 - 80 / 447
低密度の反射対応から鏡面物体の表面を再構築するための方法
【課題】低密度の反射対応から鏡面を再構築する。
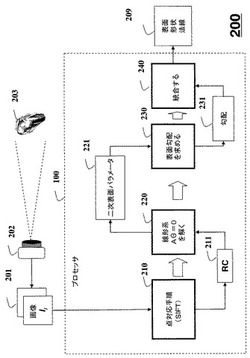
【解決手段】点対応手順が鏡面物体203の画像のセットに適用され、低密度の反射対応が生成される(210)。画像のセットは、カメラ202によって取得される間、回転を受ける。すなわち、カメラ202、環境、又は物体203のいずれかが回転する。線形系AΘ=0が解かれる(220)か、又は関連する二次錐計画(SOCP)が解かれる。ここで、Θは局所表面パラメーターのベクトルである。表面の勾配は局所二次曲面パラメーターから得られ(230)、勾配は法線を得るために統合される(240)。ここで法線は表面の形状を定義する。
(もっと読む)
欠陥検出方法、欠陥検出装置、及びプログラム

【課題】画像処理技術を用いて検査対象物の輪郭線上の欠陥を検出するにあたり、検出結果に対する、前記検査対象物の許容される膨張、収縮、或いは変形の影響を抑制し、かつ、計算処理量を少なくすることで、高精度かつ効率的な欠陥検出方法、プログラム、及び装置を提供する。
【解決手段】検査対象物の原画像に対して適用する微分処理により、エッジ強度画像とエッジ角度画像を生成し、前記エッジ角度画像に対して、さらに微分処理を適用することにより、角度変化強度画像を生成し、前記エッジ強度画像と前記角度変化強度画像に共通する特徴に基づいて前記検査対象物の欠陥を検出する。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記録媒体
【課題】濃度調整のために定型パターンを出力したきのフレア量を記憶し、記憶したフレア量を用いてフレアを補正することにより演算量を削減する。
【解決手段】スキャナ補正部104は、スキャナ103から入力した画像データ(反射率リニア)に基づきフレア補正を行い、読み取り原稿面の乱反射を補正する。テストパターンのフレア量(Σ(K(i,j)×X(x+i,y+j)))を予め記憶しておき、入力画像Y(x,y)を、Y(x,y)/(1+フレア量)により補正する。
(もっと読む)
画像表示システム及び画像表示方法
【課題】コネクタ接続盤上のコネクタアダプタ端子の情報を高い信頼性をもって作業者に提供し、コネクタアダプタ端子の使用にかかる利便性を向上させる。
【解決手段】複数のコネクタアダプタ端子11及び当該複数のコネクタアダプタ端子の位置検出のためのマーカ12が配置されるコネクタ接続盤上のコネクタアダプタ端子11及びマーカ12をあわせて撮影し、撮影画像上のマーカの位置、及びコネクタ接続盤上の複数のコネクタアダプタ端子11のそれぞれの位置とマーカ12の位置との関係を示す位置関係情報をもとに、撮影画像上のコネクタアダプタ端子11の位置を検出し、検出した位置をもとにコネクタアダプタ端子11の位置を示すアダプタ表示用画像を撮影画像上に重ね合わせて表示する。選択されたアダプタ表示用画像に対応するコネクタアダプタ端子に関するタグ情報を設備情報DBから読み出して表示する。
(もっと読む)
レーザ加工処理の品質を監視する方法及びこれに対応するシステム
【課題】レーザ加工中にリアルタイムに、人間を介することなく加工品質を監視し、技術パラメータの修正を可能とする。
【解決手段】加工品質を表すパラメータを所定の加工品質を表す基準パラメータと比較して、1セットの調整された処理パラメータを取得し、加工処理500の欠陥の状態を含むそれぞれの状態を特定する複数の統計モデルθkを提供し、リアルタイムで獲得された1セットの処理観測に対してメンバーシップの認識の動作を実行する。1セットの処理観測は、加工処理500の状態を特定する複数の統計モデルθkの1又はそれ以上に対して、セットの正規化された処理パラメータを含む。認識の動作は、認識の動作で認識された状態の関数として、1又はそれ以上の原因の特定を含む。
(もっと読む)
検査方法、検査装置、プログラム及び画像形成装置の製造方法
【課題】加工孔又は凹部が施された検査対象物の良否を、高感度で、誤検出を抑制して、判定することができない。
【解決手段】撮像手段で撮像した画像をデジタル化した画像データから得られる画像データを構成する輝度配列の座標系を、rθ極座標変換の基準点を孔又は凹部中心付近として極座標系輝度配列に変換する画像処理をし、極座標系輝度配列の中で、基準点から半径rにおける輝度配列を抽出し、複数箇所の輝度値から輝度配列の位相を特定し、半径rの値を変更して位相特定より特定される位相を複数取得し、平均化し、平均化された位相と各半径rにおける輝度配列の少なくとも2箇所の輝度値とにより、周期性のある輝度値配列を各半径r毎に新たに生成し、判定基準輝度値配列とし、極座標系輝度配列の各半径rにおける輝度配列の値と各半径rに対応する判定基準輝度値配列とを照合して良否を判定する。
(もっと読む)
ウェブ製造プロセスにおける用途固有の繰り返し欠陥検出
処理装置
【課題】立体物をポリゴンメッシュでモデリングしディスプレイに描画するための前処理として行われるジオメトリ処理を行う。
【解決手段】ジオメトリ処理のうち、頂点処理は頂点ごとに別々のプロセッサに分担して行わせ、そこで得られる処理済み頂点データをプロセッサ間で通知し、三角形ストリップ、独立三角形の処理時において異なるタイミングで座標変換処理、勾配算出処理合うことにより、各プロセッサにおいてポリゴン処理を行うことを可能にする。各プロセッサでは、頂点処理終了後に連続的にポリゴン処理を実行できるので、頂点処理とポリゴン処理との実行タイミングにアンバランスが発生しにくくなり、従って、プロセッサの遊び時間が少ない効率良い演算を行うことができる。
(もっと読む)
表面計測方法及び装置
【課題】計測対象物の平面部と凹部とを正確に分離可能な表面計測装置を実現する。
【解決手段】計測点読取処理110が読み取った計測点データは範囲外点排除処理111で範囲外データが排除される。最頻点抽出処理112は抽出した計測点データから最小二乗法で直線を作成し計測点と直線との差を作成する。ヒストグラムを作成し第1の閾値と平均値を算出し閾値と平均値とが同一とみなせるかどうかを判定する。同一ではない場合、閾値以下の計測データを排除し、直線近似から再処理を行い、閾値と平均値とを再度算出する。算出した閾値と平均値とが同一とみなせるまで処理を繰り返し実行する。
(もっと読む)
画像処理方法および画像処理システム
【課題】連続的に移動する検査対象を静止させることなく、光沢を除去して、より精度の高い画像処理を行うことのできる画像処理方法および画像処理システムを提供する。
【解決手段】画像処理装置は、所定位置に配置された撮像部を用いて、当該撮像部に対して一定の相対位置に配置された照明光源で当該撮像部の視野を照明した状態で、予め定められた方向に移動する検査対象を複数回撮像し、撮像部による一連の撮像により取得される複数の画像のうち2つの画像間で検査対象の少なくとも一部を示す領域を順次探索することで、検査対象を基準として、複数の画像を位置合わせし、当該位置合わせされた複数の画像から合成画像を生成する。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 検査対象物のタイヤ内側が撮影された画像から欠陥と刻印文字とを判別することができる画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 テンプレート領域設定工程a2では、判別対象が含まれる位置にテンプレート領域を設定する。自己相関値算出工程a3では、自己相関値を算出し、差分処理工程a4では、相関差分値を算出する。極大位置検出工程a5では、相関差分値の極大位置を検出する。偏差値算出工程a6では、極大位置の間隔を算出し、極大位置の間隔の偏差値を算出する。線状模様数算出工程a10では、画像中のブラダーグルーブの合計数を算出する。判定工程a7,a8,a11,a13では、極大位置の間隔の偏差値とブラダーグルーブの合計数とに基づいて、判別対象が刻印文字および欠陥のうちのいずれであるかの判定を行う。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、検査の安定化および高精度化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、タイヤ回転方向に直交する方向のラインごとに、取込画像の各画素の濃度を、各画素が含まれるライン上の平均濃度に変換して、濃度射影変換する。次に、濃度射影変換が行われた画像に対して、タイヤの回転方向のラインのうちの1つのライン上の画素について、フーリエ展開する。フーリエ展開された周波数成分からコード露出帯域の周波数成分を除いた残余の周波数成分を逆フーリエ展開し、逆フーリエ展開手段によって求めた逆フーリエ変換濃度と濃度射影変換によって求めた射影変換濃度との差分濃度を求め、差分濃度について、周期性があればコード露出と判定し、周期性がなければ刻印文字と判定して、コード露出欠陥検出処理を行う。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、検査の安定化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、タイヤ回転方向に直交する方向のラインごとに、取込画像の各画素の濃度を、各画素が含まれるライン上の平均濃度に変換して、濃度射影変換する。次に、濃度射影変換が行われた画像に対して、タイヤの回転方向のラインのうちの1つのライン上の画素について、フーリエ展開する。また、濃度射影変換を行う前の取込画像から自己相関値を算出し、算出した自己相関値に基づいてブラダーグルーブの本数を算出する。フーリエ展開された周波数成分から、算出されたブラダーグルーブの本数で決まる周波数成分を除去し、残余の周波数成分を逆フーリエ展開し、逆フーリエ展開された画像に基づいて欠陥検出処理を行う。
(もっと読む)
シーンにおける物体の姿勢を求めるための方法
【課題】通常のカメラ又はマルチフラッシュカメラのいずれかによって取得される画像内の奥行きエッジを用いた物体の検出、位置特定及び姿勢推定のための方法及びシステムを提供する。
【解決手段】シーンにおける物体の姿勢が、まず仮想カメラを用いて物体のモデルの仮想画像の集合をレンダリングすることにより求められる。各仮想画像の集合は、モデルの異なる既知の姿勢についてのものであり、各仮想画像から仮想奥行きエッジマップを作成し、データベースに格納する。未知の姿勢にある物体の実画像の集合が、実カメラによって取得され、実画像毎に実奥行きエッジマップを作成する。コスト関数を用いて実奥行きエッジマップを仮想奥行きエッジマップと比較し、未知の姿勢に最も一致する既知の姿勢を求める。この照合は奥行きエッジマップ内の画素の位置及び配向に基づく。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 画像中のブラダーグルーブを検出し、検出したブラダーグルーブを画像中から除去する画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 画像処理方法は、濃度射影変換工程と、フーリエ展開工程と、周期算出工程と、逆フーリエ展開工程と、出力工程とを含む。濃度射影変換工程では、第1画像に第1方向の濃度射影変換を行って第2画像を作成する。フーリエ展開工程では、第2画像中の第2方向に並ぶ画素の濃度値をフーリエ展開する。周期算出工程では、第1画像中の線状模様の第2方向の周期を算出する。逆フーリエ展開工程では、フーリエ展開された周波数成分から、線状模様の周期を表す周波数成分を除去し、残余の周波数成分を逆フーリエ展開して第3画像を作成する。出力工程では、逆フーリエ展開工程で作成された第3画像を表す除去済画像情報を出力する。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、凹凸欠陥を検出することができ、検査の安定化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、第1の方向、たとえばタイヤ回転方向での各画素の濃度を微分した微分値に基づいて、欠陥候補が大規模凹凸欠陥であるか否かを、凹凸の種類ごとに予め定める専用しきい値に基づいて判定する。次に、画像を構成する画素のうち最小の濃度の画素の位置を中心とする第1の方向での予め定める微分範囲について、画素の濃度を微分した微分値を加算した微分和に基づいて、小規模凹欠陥であるか否かを判定する。さらに、各画素を中心とする第1の方向での予め定める微分幅での微分値に基づいて、鋭角凹欠陥であるか否かを判定する。
(もっと読む)
3次元物体認識装置及び3次元物体認識方法
【課題】高精度且つ高速に3次元物体を漏れなく認識することができる3次元物体認識装置及び3次元認識方法を提供する。
【解決手段】 認識対象である3次元物体3のモデルをあらゆる姿勢に変化させながら、カメラ画像に射影して得た各姿勢での輪郭モデルを格納した輪郭マップ14及び前記3次元物体3のモデルに含まれる文字等のテクスチャ画像における各姿勢でのテクスチャモデルを格納したテクスチャマップ15を記憶し、認識対象である3次元物体3を所定方向から撮像手段4により撮影して画像を取得し、取得した原画像に基づいて、該原画像の解像度を異なる比率で低下させたピラミッド画像を作成し、解像度が最も低い前記ピラミッド画像に対して各姿勢での輪郭モデル及びテクスチャモデルをあらゆる位置に移動させながら、前記3次元物体3の位置及び姿勢を評価する。
(もっと読む)
被覆電線検査装置およびそれを備えた電線処理機
【課題】被覆電線の端部の状態を的確に検査することのできる被覆電線検査装置およびそれを備えた電線処理機を提供する。
【解決手段】被覆電線検査装置Aは、被覆Hが剥ぎ取られた芯線Sの端面Tを撮像するCCDカメラ3と、CCDカメラ3により撮像された画像から芯線Sの本数を計測可能な計測手段9aと、計測された芯線Sの本数が予め定められた所定の本数と一致するか否かに基づいて、被覆電線Dの端部の状態の良否を判定する判定手段9bと、を備えている。
(もっと読む)
画像処理装置、画像処理方法、そのコンピュータ・プログラムおよびプログラムを記録した記録媒体
【課題】高速に検査対象を含んだ検査領域を求めることが可能な画像処理装置を提供すること。
【解決手段】検査対象判定部33は、間引き量に応じて画像データに測定点を設定し、それぞれの測定点のRGBの輝度値に応じて検査対象の候補点であるか否かを判定する。検査ライン設定部34は、検査対象判定部33によって候補点と判定された測定点が存在するラインを検査ラインに設定する。検査領域拡大部35は、検査ライン設定部34によって設定された検査ラインに応じて検査領域を拡大する。そして、検査領域判別部36は、検査領域拡大部35によって拡大された検査領域が検査対象を含む検査領域であるか否かを特徴量に応じて判別する。したがって、高速に検査対象を含んだ検査領域を求めることが可能となる。
(もっと読む)
ラインスキャンカメラを使用してオンラインウェブを監視するシステム及び方法
様々な実施形態は、流れ方向(118)に装置に対して移動するオンライン製品ウェブを検査する装置を目的とする。装置は、視野(114)を画定し、視野が製品ウェブ(208)の部分を含むように配置されるラインスキャンカメラ(102)を含み得る。カメラ制御システム(104)は、カメラ(102)と電子通信し得、ウェブ速度センサ(110)から製品ウェブの速度を示すウェブ速度データを受信し、ウェブ速度データをライントリガ信号に変換するように構成され得る。ライントリガ信号は、流れ方向に不断の画素解像度を達成するために必要なカメラ画像キャプチャの時間周波数を示し得る。更に、カメラ制御システム(104)は、製品位置データを受信し、製品位置データを考慮するフレームトリガ信号を生成するように構成され得る。フレームトリガ信号は、画像フレームと画像フレームとの間で中断を示し得る。 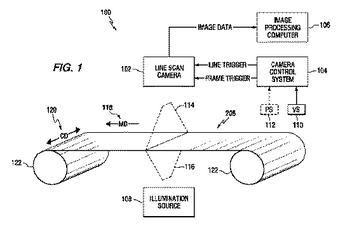 (もっと読む)
(もっと読む)
61 - 80 / 447
[ Back to top ]