
Fターム[5B057AA13]の内容
Fターム[5B057AA13]に分類される特許
81 - 100 / 109
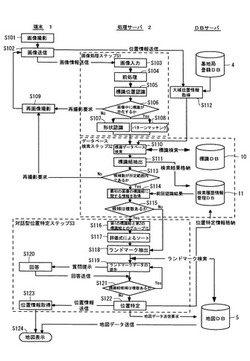
位置特定システム及び位置特定方法
【課題】携帯端末の位置を精度良く確実に特定する。
【解決手段】本発明の位置特定システムは、携帯端末1の撮影画像から標識組に関する情報を認識する画像処理手段7と、予め標識組に関する情報が登録された標識データベース10と、前記標識組に関する情報に基づき標識データベース10から標識組候補を検索するデータベース検索手段8と、予めランドマークに関する情報が登録された地図データベース5と、前記標識組候補に基づき地図データベース5から前記標識組候補の周辺にあるランドマークに関する情報を抽出すると共に該ランドマークに関する情報を質問形式で携帯端末1に提示し、該質問形式で提示されたランドマークに関する情報に対する携帯端末1側からの返答情報に基づき、携帯端末1の位置を特定するための位置特定情報を出力する対話処理手段9とを備えていることを特徴とする。
(もっと読む)
画像解析プログラム、該プログラムを記録した記録媒体、画像解析装置、および画像解析方法

【課題】ロードサイド解析の省力化を図ることにより、作業者の閲覧負担軽減および地図メンテナンス作業の効率化を実現すること。
【解決手段】移動体の移動にしたがって座標位置Aから座標位置Bに移動したビデオカメラ401によって被写体P1、P2を撮像している。WABは座標位置A,Bとの距離差、Saは座標位置Aにおける投影面、Sbは座標位置Bにおける投影面、Taは座標位置Aにおける視錐体、Tbは座標位置Bにおける視錐体、Θは視錐体Ta,Tbの画角、Faは座標位置Aにおける映像フレーム、Fbは座標位置Bにおける映像フレームである。投影面Sa,Sb上での被写体P1,P2のオプティカルフローの値は移動距離L1,L2としてあらわされる。オプティカルフローの値L1,L2と奥行きを示す距離P1y,P2yは反比例の関係にあり、オプティカルフロー比の逆数は距離比と等しくなる。
(もっと読む)
情報表示装置
【課題】実風景における位置と地図画像との対応関係をユーザに呈示する情報表示装置を提供することを目的とする。
【解決手段】情報表示装置(IDA、IDAr)において、実写画像取得部(1)は実写画像(IC)を取得し、地図情報記憶部(4)は地図情報(IG)を記憶すると共に地図画像(IM)を生成し、画像表示部(7、8)は実写画像(IC)及び地図画像(IM)を表示し、入力部(6)はユーザの動作に基づいて実写画像(IC)及び地図画像(IM)のいずれか一方に表示される構造物(Rc/Rg)の少なくとも1つを指定し、構造物対応関係取得部(5)は実写画像(IC)に表示される構造物と地図画像(IM)に表示される構造物との対応関係(ICb)を取得する。
(もっと読む)
長方形近似システム、長方形近似方法、プログラム及び記録媒体
【課題】建物の平面形状を適切に且つ迅速に長方形に近似する。
【解決手段】本発明の長方形近似システムは、建物の平面視輪郭を示す輪郭データを有する電子地図を記憶したハードディスク3と、輪郭データを抽出する輪郭データ抽出部13と、輪郭データからこの輪郭データに対応している建物の最東端点、最西端点、最南端点、及び最北端点を抽出する端点抽出部14と、この端点抽出部14によって抽出された4つの端点で形成される四角形が長方形であるか否かを識別する形状識別部15と、四角形が長方形でないと識別された場合に、その四角形に近似した長方形を形成する長方形形成部16とを備えるようにしている。
(もっと読む)
画像上にデータをスーパーインポーズする方法およびシステム
【課題】スーパーインポーズされたデータによって、パワーの小さい、又はパワーのない地図領域が、最大パワーの存在する領域と同じ程度に不明瞭化されることのないようにする。
【解決手段】
データを画像上にスーパーインポーズする為に、前記データの数値を表す為にカラースケールを決定し、前記カラースケールを使って前記データを前記画像上にスーパーインポーズし、前記データの前記数値における変化に基づいて前記スーパーインポーズのオパシティを変化させる。好ましくは、さらに、最低オパシティ及び最高オパシティを設定し、前記スーパーインポーズの前記オパシティを、前記最低オパシティ及び前記最高オパシティ間でスケーリングする。
(もっと読む)
画像間変化抽出支援システム及び方法
【課題】 センサ特性、撮影条件の異なる画像間において、地上基準点や数値標高モデル等を用いた前処理を行なわなくても、効率的に変化抽出を行なうことを可能にすること。
【解決手段】 変化抽出の対象とする地物に変化が発生した場合、その対象地物を含む領域において対象地物の存在割合が変化することに着目し、疎から密への段階的な画像間の位置合わせと画像のブロック分割、抽出対象地物の存在割合比較の処理を繰り返していくことで、段階的に画像位置合わせを行ないながら、徐々に変化候補領域を絞り込んでいくことで、変化抽出作業を支援するシステムを提供する。
(もっと読む)
地図更新装置
【課題】自車両周辺の立体物等の目印を用いて自車両位置を高精度に推定した結果から道路形状等の地図情報を更新する。
【解決手段】自車両の位置を検出する自車位置センサ10、自車両周辺の目印をランドマークとして検出するランドマークセンサ12と、道路形状及び複数のランドマークの位置を含む地図情報を記憶する記憶装置16と、複数のランドマークの位置情報と記憶装置に記憶された複数のランドマークの位置情報とがマッチングしているか否かを判断し、マッチングしていると判断された複数の目印の位置情報及び自車両の位置情報に基づいて、道路形状を演算し、演算された道路形状に基づいて、地図情報を更新する制御装置14とから構成されている
(もっと読む)
地物形状簡略化装置、簡略化方法およびそのプログラム
【課題】 地図における地物形状は複雑な形状をしており、アプリケーションによって必要とされる簡易な形状を、簡略な手法で生成することが求められていた。
【解決手段】 地物形状を構成する辺を、その方向により4つに分類し(ステップS130)、各分類に属する辺を一つずつ取り出して、その辺またはこれを延長して得た辺から四角形を構成する(ステップS140)。この四角形を候補形状として元の地物形状との重なりやはみ出しを計算し、スコアSCを求める(ステップS145)。このスコアSCが閾値TSより大きいものがあれば、これを簡略化形状として出力する(ステップS160)。閾値TSより大きなスコアSCを有する四角形が見つからなければ(ステップS150)、所定の条件を満たす二つの候補形状の和集合を求め(ステップS180)、これを新たな候補形状として再度スコアSCを計算して、簡略化形状を抽出できないか判定する。こうすることで、簡略な処理により、複雑な地物形状を容易に簡略化することができる。
(もっと読む)
道路ネットワークデータの自動生成方法
【課題】 デジタル地図データベースの道路に関連する図形データを利用して、低コストでより高精度の道路ネットワークデータを自動生成すること。
【解決手段】 道路ネットワーク自動生成システムは、道路ネットワークデータの入出力等を行う中央処理装置1と、キャラクタ及びグラフィック画面を有するキ−ボ−ド装置2付きディスプレイ装置3と、中央処理装置1から参照可能なデジタル地図データファイル4と、を有している。中央処理装置1は、道路データ抽出処理部5、ベクトル画像変換処理部6、道路中埋め処理部7、細線化処理部8及び形状補整処理部9を有している。デジタル地図データファイル4は、CDドライブまたは記憶装置に格納されており、これを中央処理装置1に読み込み、中央処理装置1の道路データ抽出処理部5、ベクトル画像変換処理部6、道路中埋め処理部7、細線化処理部8、形状補整処理部9で自動生成した道路ネットワークデータをディスプレイ装置3に表示する。
(もっと読む)
衛星画像等を用いた地図作成のための道路認識システム
【課題】 解像度が60-100cm/Pixel程度の衛星画像又は航空写真画像を用いて地図を作成する目的において、画像中の道路部分を自動的に認識することができるシステムを提供する。
【解決手段】 道路の衛星/航空写真画像と、道路を直線的な道路ベクトルの集合として定義した簡易道路データとを用いて前記画像中の道路を認識するシステムであって、前記画像中の道路を表す部分を抽出した道路範囲画像を生成する手段、道路範囲画像中の地上物を表す部分をマーキングした地上物抽出画像を生成する手段、地上物抽出画像中の道路ベクトルに平行な直線成分を抽出し、当該直線成分に沿って地上物抽出画像を領域分割した道路領域分割画像を生成する手段、道路領域分割画像の各領域に含まれる地上物の大きさ及び占有割合に基づいて、当該領域の属性を分類した結果を出力する手段を備える道路認識システム。
(もっと読む)
自車位置検出装置、ナビゲーション装置、減速制御装置及び自車位置検出方法
【課題】 分岐地点で自車両が分岐路に進んだかどうかの判断を的確に行い、ナビゲーション装置で認識している自車両の現在位置を的確に補正する。
【解決手段】 単眼カメラ4の撮像情報に基づいて左右の道路白線の線種を判断し、ナビゲーション装置2からの自車両前方の道路地図情報に基づいて自車両前方にインターチェンジ出口への分岐地点を検出したとき、左右の道路白線の何れか一方が分岐地点の境界線の特徴である太破線であることが検出され(ステップS21、S25)、その後、他方の道路白線が太破線であることが検出されたとき(ステップS22、S26)、自車両は境界線を跨いで走行し、すなわち、本線から分岐路に進んだと判断する(ステップS23、S27)。この境界線を跨いだことを検出したとき、ナビゲーション装置2に対して位置補正要求を行い、ナビゲーション装置2では自車両の現在位置を、分岐地点の境界線近傍の位置に補正する。
(もっと読む)
図化システム
【課題】中間ファイルを不要とすることができると取り扱う情報量が激減するため、用いるシステムの取り扱いが楽になり、効率化され、図化システムのみならず、これを含む綜合システムの負荷を減らすことができるので、写真測量に関して、前記中間ファイルを不要にでき、更に高品質の空間データを得ることが望まれている。
【解決手段】3次元グラフィックスライブラリを用いて、異なる二つの映像で、測量写真あるいは地理情報に関するオブジェクトのステレオ映像を作成する工程を含み、前記映像が写真映像である場合には、少なくとも撮影点と方向とによる補正をする工程を含むことを特徴とする空間データを生産するための図化システムが好ましい。
(もっと読む)
建物3次元形状補間方法、補間装置、補間方法のプログラム
【課題】撮影画像から建物の3次元形状を復元する際、処理の限界やエラーがあった場合でも建物を復元し、撮影経路上の建物を漏れなく再現する。
【解決手段】建物再投影部104は全方位画像にその位置情報をもとに建物形状モデルを再投影する。未復元領域抽出部105は再投影した建物位置をもとに建物形状モデルがまだ復元されていない領域を抽出する。建物存在判定部106は未復元領域に建物等が存在するかどうかを判定する。建物壁面抽出部107は抽出した未復元領域から建物壁面にあたる部分を抽出する。建物形状モデル復元部110は建物壁面の大きさや位置などの三次元情報を付与およびこれを利用して壁面に貼り付けるテクスチャ画像を全方位画像から切り出して作成し建物形状モデルとする。建物形状モデル更新部109は得られた建物形状モデルを建物形状モデル蓄積部103のデータとして更新する。
(もっと読む)
位置記録装置及び位置記録方法
【課題】認識対象物の検出誤差を考慮して記録処理を行うことにより、認識対象物の正確な位置記録が行える位置記録装置及び位置記録方法を提供すること。
【解決手段】カメラ2で撮像された画像情報に基づいて標識の画像認識を行い(S12)、画像認識された標識の位置を検出し(S20)、検出された標識の位置情報の誤差を演算し(S22)、標識の位置情報及びその位置検出誤差情報を記録し(S24)、地図情報の標識位置と今回検出された標識の位置情報の計測誤差を比較し(S34)、その誤差の小さい方の位置情報を地図データとして記録する(S36)。
(もっと読む)
数値標高モデル自動生成システム
【課題】等高線情報から補間により得られた数値標高データが有する等高線付近の段差を含む各種の不自然な地形を実質的に解消し、しかも段差解消に伴って他の余分な人工的地形を実質的に生じない、実用的な計算時間で実行可能な整形処理方法を備えたDEM自動生成システムを提供する。
【解決手段】地形図認識処理手段と等高線部標高データ生成手段と未知点補間手段に加え、注目する画素P0を中心とする3行3列の画素をとりあげ、P0の標高が縦横斜めの4種の方向のいずれかで極大又は極小値を取る場合は、その方向での画素とP0の標高の差の絶対値のうち最大値dをとり、dの値の大小に応じ平滑化範囲と反復回数を決定し、最近接する等高線からの距離に応じて重み付け平均の範囲を決定して単純平滑化法を前記反復回数分だけ施す整形処理手段を備えることを特徴とする。
(もっと読む)
情報埋め込み装置、情報読み取り装置及びそれらのためのプログラムをコンピュータ読み取り可能に記録した記録媒体
情報埋め込みは、ベクトルデータから多角形を構成する頂点を抽出し、埋め込み情報に基づいて、多角形の辺上に存在する点の個数を変更することで埋め込み処理を行う。情報読み取りは、情報埋め込み済みベクトルデータから、多角形の辺上に存在する点を抽出し、所定の規則により、埋め込み情報を読み取る。  (もっと読む)
(もっと読む)
シーンの三次元変化検出及び測定のためのシステム及び方法
本発明は、少なくとも1つのオブジェクトを有する第1三次元シーンの第1ディジタルモデル(102)を受け入れる段階と、少なくとも1つのオブジェクトを有する第2三次元シーンの第2ディジタルモデル(112)を受け入れる段階と、第1及び第2ディジタルモデル間の差分を表す差分表示を与えるように前記第1及び前記第2ディジタルモデルに関する変化解析(102)を実行する段階とを有する。一実施形態においては、平均二乗誤差演算(110)が、ディジタルモデル間の差分を表示する値を与えるように第1及び第2ディジタルモデルにおいて実行される。他の実施形態においては、合成演算が、変化解析(120)により与えられる差分モデルにおいて実行され、オブジェクトレベル変化データベース(124)が実行される。  (もっと読む)
(もっと読む)
画像処理方法及び画像処理装置
【課題】コピー機、ファクス装置、スキャナ等の画像処理装置が特大画像を効率よく処理できるように画像断片を操作する。
【解決手段】スキャナ202により特大画像が複数の断片に分割されて読み取られメモリ204に格納され、この複数の画像断片が同一の縦横比の矩形に縮小されてディスプレイ208に表示される。ユーザーはタッチスクリーン210又はマウス等を使ってディスプレイ画面上で画像断片を操作し、任意の位置に移動して整列させる。プロセッサ206は、該複数の相対位置を計算して位置合わせし、該複数の画像断片を元の特大画像画を再生してプリンタ212等に出力する。
(もっと読む)
車両位置認識装置及び車両位置認識方法
【課題】 車両に搭載された撮像装置により撮像した画像情報に加えて、地図情報や車両情報等を用いることにより、走行中の道路の中における車両の位置をより詳細に特定することを可能とする車両位置認識装置及び車両位置認識方法を提供する。
【解決手段】 車両に搭載された撮像装置2により少なくとも道路の路面を撮像した画像情報を取り込む画像情報取得手段3と、地図情報から前記画像情報の撮像位置周辺の地物に関する道路特徴情報を取得する道路特徴情報取得手段9と、前記画像情報の認識処理を行い、前記画像情報の中に含まれる前記地物に対応する認識対象物の画像を認識する画像情報認識手段10と、道路特徴情報取得手段9により取得された前記道路特徴情報と、画像情報認識手段10により認識された前記認識対象物の画像の前記画像情報中の配置とに基づいて、車両の道路幅方向の位置を特定する車両位置特定手段17と、を備える。
(もっと読む)
地形図作成方法および地形図作成システム
【課題】 低コストでしかも容易に要求精度を満たすデジタルオルソフォトを作成する地形図作成方法および地形図作成システムの提供。
【解決手段】 地形図作成方法100は、デジタルオルソフォト作成部Aの処理と、数値地形モデル作成部Bの処理で構成される。デジタルオルソフォト作成処理4は、数値地形モデル作成部Bの処理で得られた数値地形モデルを用いて、空中三角測量処理3がなされた航空写真をデジタルオルソフォトに変換する。デジタルオルソフォトに対して、検査(一次)5、修正6、色調補正7、検査(二次)8、最終調整9の処理を経て、成果品完成10が得られる。修正6は、数値地形データ(TIN)に高さを追加することにより要求精度を満たすものである。
(もっと読む)
81 - 100 / 109
[ Back to top ]