
Fターム[5B057CE08]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 合成 (6,208)
Fターム[5B057CE08]に分類される特許
6,101 - 6,120 / 6,208
セキュリティ文書管理方法

【課題】
機密性の高い文書が印刷・配布・複製等されたとき、誰がいつ印刷・配布・複製等したかわからず紙文書での流通を管理できなかった。
【解決手段】
ユーザの処理要求に基づいて文書へのアクセスログを作成し、ログIDから電子透かしを作成し、「社外秘」などのウォーターマークと合成して文書に付加する。また、合成されたログIDをウォーターマークから抽出して文書IDを取得し、文書読み込み時に文書に対する処理要求があったことを所有者へ通知する。
(もっと読む)
画像処理装置、画像処理方法、および、画像処理プログラム

【課題】複数の画像データからより高解像度の画像データを生成する際に、生成画像の高画質化を図る。
【解決手段】CPU200は、時系列に並ぶ複数の画像データF0〜F3を取得し、画像データF0〜F3のそれぞれの生成時に対応するディジタルスチルカメラ10の動きに関する情報として、撮像画像に対して垂直な直線を軸とした被写体の回転方向のずれに対応する角速度を含む角速度VX、VY、VZを取得する。CPU200は、画像データF0〜F3が表す画像間における被写体の位置ずれ補正量を、角速度VX、VY、VZを用いて算出する。CPU200は、算出された位置ずれ補正量に基づいて、位置ずれを補正すると共に、補正された画像データF0〜F3を合成してより解像度の高い高解像度画像データを生成する。
(もっと読む)
周辺界の画像を表示するための装置及び方法
使用者に周辺状況の画像を表示するための装置及び方法は、周辺界の画像情報を記録し、伝達装置20を介して中央ユニット30に接続される画像センサー装置10と、中央ユニット30が前記画像センサー装置10からの画像を表示する頭部搭載型の表示装置40とを備えている。本発明は、中央ユニット30が仮想3次元界を生成し、画像情報8が3次元界にテクスチャとして画像センサー装置10から即時に投射される。そのとき、3次元界の一部が、表示装置40に即時に表示される。 (もっと読む)
ウォーターマーク検出のためのスケーリングファクターの探索方法及び装置
探索されるべきウォーターマークコンテンツ(W)を有する入力信号(Y′)を受信するための入力部を有するウォーターマーク検出器(20)を提供する。検出器(20)の第1処理器(40)は、特徴的な特性又はフィンガープリント(P1乃至Pq)及び関連時間記述子(d1乃至dq)の対応する集合を識別するために信号の部分(100,110,120)を分析するように動作可能である。データベース(50)への通信リンクは、信号を識別し、オリジナルの信号における部分(100,110,120)に対応する対応時間記述子(MT1乃至MTq)を決定するようにデータベース(50)にフィンガープリントを通信するように備えられている。入力信号(Y′)が対象となっているスケーリングファクターを、時間記述子(d1乃至dq)と取り出された時間記述子(MT1乃至MTq)との間の差から演算するように第2処理器(220)を有する。スケーリングファクターは、信号を再スケーリングし、再スケーリングされた信号(Y′)からウォーターマークを抽出するように用いられる。  (もっと読む)
(もっと読む)
フィブラスメディアの認識と追跡のための方法、及びこの方法の応用、特にコンピュータ分野への応用
真正なフィブラスメディアとしてペーパー、厚紙又は不織布からなる未認証フィブラスメディアを認容する方法であって、この方法は、
―真正なフィブラスメディアのレファレンス ゾーンから抽出された構成上の特徴から、レファレンスゾーンのフィブラス構成を表わす、少なくとも1つの真正なデジタル署名の生成するステップ及び、デジタルデータメディア上の前記デジタル署名を記録するステップ;
―未認証フィブラスメディアのレファレンス ゾーンから抽出された構成上の特徴から、レファレンスゾーンのフィブラス構成を表わす未認証デジタル署名を生成するステップ;及び
―未認証フィブラスメディアの認容についてポジティブ又はネガティブな決定をするために、未認証デジタル署名と、先に記録された真正なデジタル署名の少なくとも1つとを比較するステップ。
を含むものである。
(もっと読む)
画像フリーズ検出器
本発明は、ディスプレイに供給される信号連鎖の中に反復される電子署名を加えることによりディスプレイ上の画像フリーズ状態を識別し、電子署名がディスプレイ上に存在するかどうかを検出する方法とシステムを記載する。もし電子署名が存在しなければ、警報ユニットが起動される。 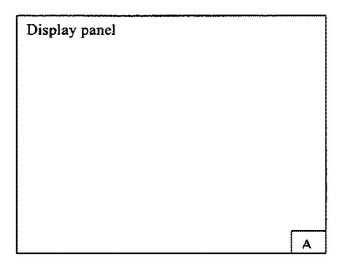 (もっと読む)
(もっと読む)
ビデオフラッシュライトを実行する方法およびシステム
没入型監視システムでは、多数のカメラとその他のセンサからのビデオ又はその他のデータが、場面のレンダリング2D又は3Dモデル内にデータを重ね合わせるビデオ処理システムにより処理、表示される。システムは、ユーザが、サイトをそこから見るための視点を選択的に識別することができるように構成された視点セレクタを有する。ビデオ制御システムは、視点を識別するデータを受け取り、その視点に基づいて、その視点からの視界に関連するビデオを生成する複数のカメラのサブセットを自動的に選択し、そのカメラのサブセットからのビデオを、ビデオ処理システムに送信させる。視点が変化するにつれて、ビデオプロセッサと通信を行うカメラが変更されて、新しい位置に関連するビデオを生成するカメラに引き渡される。没入型環境における再生が、タイムスタンプ付きのビデオ記録の同期によりなされる。 (もっと読む)
画像情報を表示する方法およびシステム
画像と共に画像情報を表示する方法とシステムが提供される。画像表示システムは、画像と画像説明を含んでいる画像パッケージを受信する(421)。画像説明は、画像情報(または「クレジット」)と、画像情報をどのように表示させるかに関する命令とを含んでいる。そのあと、画像表示システムは、画像情報が、表示される画像(423)の一部とアルファブレンディング(426)されるように、受信した画像パッケージ(421)の画像と画像説明の画像情報を表示する(423)。 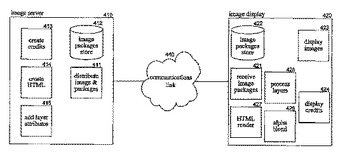 (もっと読む)
(もっと読む)
画像処理装置、イメージングシステム、並びに画像内のオブジェクトを拡大縮小するコンピュータプログラム及び方法
本発明は、画像内のオブジェクトを拡大縮小する画像処理装置に関し、この画像処理装置は、マーカの実寸法と、該マーカの、画像内におけるピクセル単位での寸法との関係から導出する校正係数に基づいて前記オブジェクトを拡大縮小するように構成した校正器を備えるもので、この校正器をさらに、前記画像内で識別される複数の異なる向きのマーカを用いて得られる複数の校正係数を生成するように構成する。画像1は、空間的に異なる向きを向い解剖学的構造2に対して配置が異なる、複数のオブジェクト3,8,9を含んでいる。オブジェクト3は、このオブジェクト3の長さをピクセル単位で測定すると共に、オブジェクト3の実長を、空間的にオブジェクト3と同様の配置をとるマーカAから求めた校正係数を用いて計算するように構成した測定ツールにリンクされる。画像1はさらに、オブジェクト8,9の実長を、これらオブジェクトのピクセル単位での長さ、および、マーカBを用いて求めた校正係数に基づいて計算するように構成した測定ツールにリンクされるオブジェクト8,9も含んでいる。異なるマーカに対応するオブジェクトは校正グループを形成するようにグループ化して、校正係数の更新によって、同じ校正グループ内の全てのオブジェクトの実寸法が自動的に更新されるようにするのが好適である。ユーザの利便性のために、各校正グループの識別は変えるのが好適である。本発明はさらに、イメージングシステム、画像内のオブジェクトの拡大縮小を可能にするコンピュータプログラムおよび方法にも関する。  (もっと読む)
(もっと読む)
画像処理をするための方法、コンピュータプログラム、装置及びイメージングシステム
本発明は、画像を処理するための方法に関し、この方法は、前記画像内にある細部に位置決め誤差の値を割り当てるステップ、前記位置決め誤差の前記値を映像化するステップ、前記値の対話形式の調節を可能にするステップ、及び前記細部の位置に対して前記位置決め誤差の値を記憶するステップを有する。この方法のステップ1aにおいて、画像1、2つの細部2a及び2bが識別されている。これら細部は大腿骨3の外面と重なるように位置決めされる。これにより各細部は、例えば適当な楕円4a及び4bを用いて、ユーザに視覚化される位置決め誤差の値を割り当てられる。位置決め誤差の夫々の値は、適切な入力手段を使用してユーザにより手動で採用される。代わりに、この位置決め誤差の値が画像品質を示すパラメタに基づいて細部に割り当てられることも可能である。さらに代わりには、画像内にある全ピクセルが位置決め誤差の初期デフォルト値を割り当てられることが可能であり、これは画像1が取得したイメージングモダリティに対応している。ユーザは位置決め誤差の値を対話形式で調節する手段を備えている。この目的のために、例えばユーザはカーソル8を用いて前記楕円の夫々の境界をドラッグし、これにより位置決め誤差の対応する値を変更する。この位置決め誤差の値は、画像内にある細部の座標と一緒に記憶される。これにより、前記位置決め誤差にリンクした細部の何れかに関する計測が実行される場合、この計測結果は、位置決め誤差の値から得られた不確定性の値を備える。これはウィンドウ9に概略的に説明され、画像細部2aと2bとの間の距離の測定結果をフィードバックする。ユーザは、細部2a及び2bに対する、これらを拡大した位置決め誤差のエリア4a、4bを再規定することにより、位置決め誤差の割り当てられた値を調節してもよい。ウィンドウ9bに示される計測の不確定性の対応する読み取り値がそれに応じて変化する。  (もっと読む)
(もっと読む)
フィルム・フィンガプリンティング
フィルム・マーキング技術は、プリント識別子を2進符号化シリアル・ナンバーに符号化すること、この2進符号化シリアル・ナンバーのビット(2進数字)を担持するために使用されることになる特定のフレーム(ビット・フレーム)を識別すること、およびこの2進符号化シリアル・ナンバーの特定のビット値に従ってこれらのビット・フレームをマーキングすることを含む。ビット・フレーム上に予め規定されたマークが存在すれば、値1を有する2進数字であることを表し、予め規定されたマークがビット・フレーム上に存在しなければ、値0を有する2進数字であることを表す。  (もっと読む)
(もっと読む)
情報強調された画像誘導介入
介入的及びリアルタイム超音波情報と、例えばX線回転血管造影法により提供される血管又は腫瘍脈管化の非リアルタイムな生体構造情報とのリンク付けは、高い計算性能を必要とする。本発明の側面によれば、超音波基準画像が異なる画像化システムにより得られる高品質画像に関して較正される。そして、操作的な介入の間、その介入の間得られるデータセットの位置合わせ又は較正が、(従来技術のデバイスにおける)高品質画像に対してではなく、基準画像に対して行われる。有利なことに、これは、高品質画像とリアルタイム画像との高速な融合を可能にすることができ、従って、患者に関して行われる操作的な介入の改良されたトラッキングを可能にすることができる。  (もっと読む)
(もっと読む)
動的な仮想図形を合成する方法
本発明は、合成サーバエンドが利用者リクエストを受信すると共に、利用者リクエスト内の情報に従って要求された仮想図形を合成するための全ての構成要素の画像ファイルを獲得する段階と、階層番号に従って順々に構成要素の対応する画像ファイルを読み込むと共に獲得された構成要素の画像ファイルを規定されたフォーマットに変換する段階と、フォーマットされた構成要素と以前に合成された中間図形を合成する段階と、全ての構成要素が合成されたかどうかを判定し、もし全ての構成要素が合成された場合には、仮想図形の画像ファイルに対して合成された仮想図形を書くと共に、他の場合には、階層番号に従って順々に構成要素の対応する画像ファイルを読み込み、構成要素の画像ファイルを規定されたフォーマットに変換することを続ける段階とを含む動的な仮想図形を合成する方法を開示する。この方法は、利用者に更に良いサービスを提供し得る。 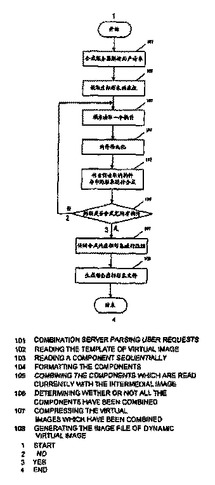 (もっと読む)
(もっと読む)
デジタル符号化画像を復号するためのシステムおよび方法
1次画像および少なくとも1つの2次画像から生成された符号化された画像を少なくとも1つの符号化パラメータを使用して復号する方法が提供される。符号化された画像は、その符号化された画像が印刷されるとき、2次画像が少なくとも1つの符号化パラメータに対応する特徴を有する光学復号装置なしには、観察者に見分けられないように形成される。その方法は、符号化された画像のデジタルバージョンを得て、少なくとも1つの符号化パラメータを決定し、符号化パラメータセット中の少なくとも1つの符号化パラメータを使用して、デジタル符号化された画像から復号された画像を構成するステップを含んでいる。 (もっと読む)
出力画像の生成
時間連続入力画像のシーケンスに基づいて出力画像(108)を生成する方法が開示されている。本発明は、入力画像のうちの第一の画像(102)において特定の物体の特定の部分(100)を識別するステップと、入力画像のうちの第一の画像(102)から画素の第一のグループ(110)をフェッチし、画素の第一のグループ(110)は、特定の物体の特定の部分(100)に対応するステップと、入力画像のうちの第二の画像(104)において特定の物体の特定の部分(100)を局在化するステップと、入力画像のうちの第二の画像(104)から画素の第二のグループ(110)をフェッチし、画素の第二のグループ(110)は、前記特定の物体の特定の部分(100)に対応するステップと、画素の第二のグループ(110)を画素の第一のグループ(110)に追加して出力画像を形成するステップとを有する。
 (もっと読む)
(もっと読む)
透かし検出方法
画像シーケンスに含まれる透かしを検出することによって、スケール係数指標を決定する方法が記載される。透かしは、シーケンス内で複数の互いに変更された形式により含まれる。第1ステップでは、本方法は、画像シーケンスを受け付けることを伴う。第2ステップでは、含まれている透かしに適用される1以上の相対的変化に応じて、画像は複数の対応するグループに実質的にソートされる。第3ステップでは、本方法は、各グループに対して、該グループの1以上の画像の少なくとも一部を対応するバッファに蓄積することを伴う。第4ステップでは、本方法は、シーケンスに含まれる透かしに適用される1以上の変化を決定するため、バッファのコンテンツを互いに解析することを伴う。第5ステップでは、1以上の変化に関する情報が、スケール係数指標を決定するため、予想されるスケール係数に関して処理される。  (もっと読む)
(もっと読む)
データ処理装置、データ処理方法、及びデータ処理プログラム
【課題】 構造物のひび割れや浮き、空洞等の変状部の有無及び位置を容易且つ安価に特定することを可能とし、また、当該変状部の経年変化をも容易且つ安価に把握することを可能とする。
【解決手段】 データ処理装置は、寸法情報を有する線図情報からなるCAD図面データを入力するCAD図面データ入力部21と、画像データを入力する画像データ入力部22と、この画像データ入力部22によって入力された画像データ上における座標値を算出する座標算出部23と、画像データ入力部22によって入力された画像データ上の情報をCAD図面データ入力部21によって入力されたCAD図面データ上に写像する写像処理部24と、この写像処理部24によって作成された写像後のCAD図面データを含む各種データを出力するデータ出力部25とを備える。
(もっと読む)
圧縮情報信号に透かしを入れる方法
第1の所定値を有する第1の信号サンプルと、別の値を有する別の信号サンプルとを備えるように圧縮される情報信号にロバストな透かし及び脆い透かしを埋め込む方法において、ロバストな透かしを埋め込む方法を開示する。ロバストな透かしを埋め込む方法は、修正の処理が、第1の値を呈する修正信号サンプルをもたらす場合に、透かしパターンによって信号サンプルを修正する工程を備える。更に、脆い透かしを埋め込む方法は、ロバストな透かしを埋め込んだ結果、信号内に残っている「1」の数(R)を集計する工程と、ロバストな透かしを埋め込んだ結果、信号から廃棄された「1」の数(D)を集計する工程と、残りの「1」と、廃棄された「1」とに基づいて脆いペイロードを判定する工程とを備える。  (もっと読む)
(もっと読む)
整数ウエーブレット拡散スペクトラムに基づく可逆データ隠蔽のためのシステム及び方法
原画素を定義域とする画像を対象として整数ウエーブレット変換(IWT)を行いIWT係数の行列を得ること、情報を埋め込むための複数のIWT係数を選択すること、及び複数の選択されたIWT係数の符号に対して複数の対応するデータ・ビットの値に従って設定すること、を含むシステム及び方法が開示される。システム及び方法はまた、マーク付け画素を定義域とする画像を対象として整数ウエーブレット変換を行いウエーブレット係数の行列を得ること、埋め込まれた情報を含む行列から複数の係数を選択すること、及び各選択された係数に対して係数に埋め込まれたデータ・ビットを抽出し、抽出されたデータ・ビットのビット値が係数の符号に基づいて判定されることをも含むことができる。  (もっと読む)
(もっと読む)
コンピュータ断層撮影画像を向上させるための方法、コンピュータプログラムプロダクトおよび装置
複数の要素から成るCT画像を向上させるための方法であって、前記各要素が組織のタイプを示す強度値を有している方法が開示されている。この方法は、第1のCT画像を受けるステップ(101)と、前記第1のCT画像に基づくエンハンスメント処理(103)により、前記第1のCT画像の複数のコピーを与えるステップと、前記コピーと前記第1のCT画像とを組み合わせる(104)ことによりエンハンスメントCT画像が与えられるステップとを含んでいる。組み合わせは、前記第1のCT画像内および前記第1のCT画像の前記複数のコピー内の領域の強度値に関する分類に基づいている。エンハンスメント処理(103)は所定の強度値範囲に関して行なわれる。方法は、コンピュータプログラムプロダクトまたは装置として実施されても良い。  (もっと読む)
(もっと読む)
6,101 - 6,120 / 6,208
[ Back to top ]