
Fターム[5B057DA12]の内容
Fターム[5B057DA12]に分類される特許
321 - 340 / 2,013
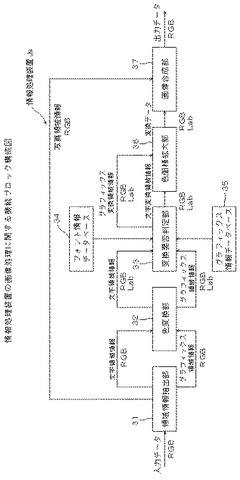
画像処理装置、画像処理方法、画像処理プログラム及び記録媒体
【課題】本発明は、色覚異常者に対する識別性の向上を図った画像処理を行う画像処理装置、画像処理方法、画像処理プログラム及び記録媒体に関する。
【解決手段】情報処理装置Jsは、領域情報抽出部31が、カラー画像データをオブジェクト毎に領域分類して各領域の該オブジェクトを抽出し、変換要否判定部33が、該オブジェクトの各領域に対して、予め設定された色覚異常者における識別性基準に基づいて、該入力カラー画像データに対してデータ変換を必要とするか否かを判定して、色面積拡大部36が、該データ変換が必要と判定された領域の色部分に対して色覚異常者の識別性を向上させるデータ変換を行う。
(もっと読む)
二次導関数エッジ検出方法のためのエッジオリエンテーション
車載白線認識装置

【課題】消し跡線等を真の白線と区別して除外することができる車載白線認識装置を提供すること。
【解決手段】車両周囲の画像を取得する車載カメラ10と、前記車載カメラ10で取得した画像から画像処理により白線候補を抽出する白線候補抽出手段30と、前記白線候補の白線らしさの確信度を算出する確信度算出手段40と、前記確信度算出手段40が算出した確信度に基づき、認識する白線を選択する白線選択手段50、60とを備え、所定範囲内に第1の白線候補及び第2の白線候補が存在し、且つ前記第2の白線候補のコントラストに対する前記第1の白線候補のコントラストの比率が所定値以下であるという条件が成立する場合、前記確信度算出手段40は、前記条件が成立しない場合よりも、前記第1の白線候補の前記確信度を低くすることを特徴とする車載白線認識装置1。
(もっと読む)
運転支援装置、運転支援方法およびプログラム
【課題】 初期状態からの画像のずれを自動的に補正する機能を提供する。
【解決手段】 運転支援装置100は、車両に取り付けられたカメラ10と、カメラ10の設置条件のデータを記憶した設置条件記憶部39と、設置条件記憶部39に記憶された設置条件のデータを用いて、画像中に映る路上の所定点までの距離を画像内での所定点の位置座標から算出する理論距離算出部35と、所定点までの距離を求めるステレオ測距部34と、ステレオ測距部34にて求めた距離と理論距離算出部35にて求めた距離との差分を求める差分算出部36と、差分算出部36で求めた差分に基づいてカメラ画像を補正する射影変換部38と、射影変換部38にて補正したカメラ画像に対し、運転を支援するためのガイド線を重畳するガイド線重畳部40とを備えた構成を有する。
(もっと読む)
表示制御装置、表示制御方法、プログラム、および記録媒体
【課題】撮像された画像の撮像領域に存在する交通標識の意味およびその位置を、容易かつ直感的に把握させること。
【解決手段】取得部106は、撮像部104によって撮像された画像を取得する。認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。制御部110は、認識部108によって認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出し、抽出した第二国の交通標識の画像を、取得部106が取得した画像上に表示するように、表示部112による表示を制御する。
(もっと読む)
ボトリング製品検索装置
【課題】特定の規約に基づくIDコードの設定等を行うことなく製品検索ができるボトリング製品検索装置を提供する。
【解決手段】ボトリング製品のラベル貼付部をカメラにより撮影したカメラ撮影画像から対象ボトリング製品を検索するボトリング製品検索装置であって、ラベルのボトル貼付面への中心投影画像に外接する矩形枠を所定のアスペクト比に座標変換して正規化したインデックス画像をボトリング製品の属性に関連付けて格納するデータ格納部と、前記カメラ撮影画像から抽出したラベル画像に外接する矩形枠を座標変換して前記インデックス画像のアスペクト比に一致させる画像変換部6と、画像変換部6での出力画像をインデックス画像中から検索して撮影したボトリング製品を特定する検索部7と、を有する。
(もっと読む)
情報処理装置および情報処理方法
【課題】安価かつ小型に実現でき、高速かつ正確に非接触にジェスチャー等のターゲット・オブジェクトを認識することができる装置を提供する。
【解決手段】一方の視差画像を2以上のレベルを持つグレイスケール画像に変換する手段と、前記変換したグレイスケール画像から所定方向に連続する同一レベルを有する連続画素群をオブジェクトとして抽出し、前記オブジェクトごとに、該オブジェクトの位置及び予め定めた最大許容視差値に基づいて、前記一方の視差画像において基準領域を設定するともに、他方の視差画像において探索エリアを設定し、前記基準領域の画像をテンプレートとして前記探索エリア内においてテンプレートマッチングを行うことにより基準領域に類似する類似領域を探索し、基準領域と類似領域の位置の差に基づいて該オブジェクトに関する視差値を決定する手段と、を備える。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】本発明の駐車検出装置1は、複数の駐車マスを含む駐車検出対象エリアの画像を撮影する撮影手段(カメラ10)と、所定の画像処理を施す画像処理手段(エッジ抽出処理部24)と、駐車検出対象エリアの画像に所定の画像処理を施した判定対象データ(エッジ抽出処理画像データ23c)と、予め駐車マス毎に設定された判定の基準となる判定基準データ23dと、を比較して車両の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備え、判定基準データは、表示パターンが撮影された駐車検出対象エリアの画像から取得した表示パターンを含む画像領域に所定の画像処理を施したデータであることを特徴とする。
(もっと読む)
測量データの分類方法、測量データの分類装置及び測量データを記録した記録媒体
【課題】短時間で、より精度良く地形を分類できる測量データの分類方法及び測量データを提供する。
【解決手段】真の分類結果が不明である全く新たなエリアにおいても、点群状の測量データを取得すれば、同じ地域特性に属する特徴量の閾値を用いて、サポートベクターマシンにより人手をかけることなく、迅速に建物や樹木の分類を行えることとなる。
(もっと読む)
親密度判定方法及び親密度判定装置
【課題】1枚の写真に写っている被写体である人物間の親密度に基づいて、多数の写真の中から目的とする写真を検索できるが、多数の写真全体における人物間の親密度を判定することができない。
【解決手段】取得した各画像から人物の顔領域を検出する顔領域検出部52と、検出された顔領域の特徴量に基づいて、顔領域の人物に関する人物情報を生成する人物情報生成部53とを有する。そして、人物情報に基づいて、複数の人物の顔領域が含まれる画像について当該画像における各人物間の親密度を判定して、複数の画像全体における各人物間の親密度を判定する親密度判定部54と、を有する。
(もっと読む)
表示処理装置、及び、プログラム
【課題】ユーザが所望する画像を表示するのに好適な表示処理装置等を提供することを目的とする。
【解決手段】画像データが表す画像を表示する表示処理装置100は、画像データを記憶する記憶部130と、表示処理装置100が配置された周囲の画像を表す周囲画像データを取得する取得部140と、取得された周囲画像データが表す周囲画像のうち所定の閾領域以上に付されている色、又は、当該周囲画像に含まれる人物の顔領域から判別される人物の種別、を決定する決定部150と、決定された色又は人物の種別に対応付けられる所定の画風に、前記画像データが表す画像を変換する変換部160と、変換された画像データが表す変換画像を表示する表示部110と、を備える。
(もっと読む)
生態系ネットワーク評価方法及びその方法を用いた生態系ネットワーク評価システム
【課題】生息適性が異なる複数の生物それぞれにとっての生息のしやすさを総合的に評価することが可能な生態系ネットワーク評価方法に関する。
【解決手段】本発明の生態系ネットワーク評価方法は、対象領域のリモートセンシングデータから、樹林によって被覆される土地区画である樹林パッチ、草地によって被覆される土地区画である草地パッチ、水辺に存在する緑地からなる土地区画である水辺緑地パッチを抽出する抽出工程(ステップS101)と、それぞれの樹林パッチに対応した樹林利用性生物のハビタット適性指数を算出する樹林利用性生物ハビタット適性指数算出工程(ステップS104)と、それぞれの草地パッチに対応した草地利用性生物のハビタット適性指数を算出する草地利用性生物ハビタット適性指数算出工程(ステップS105)と、それぞれの水辺緑地パッチに対応した水辺緑地利用性生物のハビタット適性指数を算出する水辺緑地利用性生物ハビタット適性指数算出工程(ステップS106)と、有することを特徴とする。
(もっと読む)
顔検出方法およびこれを用いた撮影装置
【課題】顔検出処理全体の計算量を減らし処理速度を向上させる。
【解決手段】まず、撮像手段2により人物被写体の撮影が行われ、各色成分毎の光が受光素子2aにより受光され画素データPxが取得される。次に、画像生成手段3において、画素データPxを用いたカラー画像からなる原画像PとG画素データを用いたG信号画像Pとが生成される。その後、G信号画像Pを用いて顔検出を行うことにより、原画像P0における顔画像FPを検出する。
(もっと読む)
撮影機器及びこの撮影機器の撮影方法
【課題】撮影画像中の複数の被写体同士の関係性を判定し、複数の被写体同士の親密な関係性を表現し得る適切な撮影タイミングを自動的に決定することができ、かつその撮影タイミングで自動的に撮影動作を実行して、常に最適な撮影画像を取得することができる撮影機器を提供する。
【解決手段】被写体像の画像信号を取得する撮像部12と、撮像部により取得された画像信号に基く画像に含まれる被写体のうち人物を含む複数の被写体の特定部位を検出する被写体部位検出部12aと、被写体部位検出部により検出された複数の被写体の各特定部位の画像内における相対的な位置関係を検出する被写体位置検出部12cと、被写体部位検出部及び被写体位置検出部による検出結果に基いて複数の被写体の関係性を判定する被写体状態判定部11bとを具備し、被写体状態判定部による判定結果に基いて撮影タイミングを決定する。
(もっと読む)
自動欠陥分類のための教師データ作成方法、自動欠陥分類方法および自動欠陥分類装置
【課題】基板の欠陥を自動的に分類するための教師データを作成する方法およびこれを用いた欠陥分類方法ならびに装置において、再現性、客観性に優れた教師データを提供するとともに、該教師データの作成におけるオペレータの負荷を軽減する。
【解決手段】収集した欠陥画像データの中から、複数の分類カテゴリに対して少なくとも1つ、当該カテゴリの典型例としての教師画像の教示のみオペレータが行う(ステップS202)。ホストコンピュータは、各欠陥画像の特徴量を算出し(ステップS203)、特徴量空間における教師画像とのユークリッド距離に応じて各欠陥画像を仮分類する(ステップS204)。そして、仮分類された各欠陥画像をアンサンブル分類器を用いて再分類し(ステップS205〜S209)、順次分類を確定させてゆく。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理対象画像上の物体が回転した場合においても特徴量の不変性を維持して、処理対象画像上から物体を精度よく認識する。
【解決手段】第1フィルタ演算部21乃至第4フィルタ演算部24は、0度、45度、90度、または135度の方向選択性フィルタを内蔵しており、前段から入力される処理対象画像に対して、内蔵された方向選択性フィルタを適用し、その結果得られた後段に出力する。第1加算部25は、出力値f1と出力値f2の加算値f1+f2を第1特徴量として認識部に出力する。第2加算部26は、出力値f2と出力値f3の加算値f2+f3を第2特徴量として認識部に出力する。第3加算部27は、出力値f3と出力値f4の加算値f3+f4を第3特徴量として認識部に出力する。第4加算部28は、出力値f4と出力値f1の加算値f4+f1を第4特徴量として認識部に出力する。本発明は、画像上の物体認識に適用できる。
(もっと読む)
画像処理装置、画像処理方法、画像処理システム及びプログラム
【課題】 画像から撮影部位を識別する際に、識別が失敗した際の影響を低減することができる仕組みを提供する。
【解決手段】 撮影部位識別部171は入力された画像から撮影部位を識別する。撮影部位識別部171はグループ分け処理部1711、識別部1712、撮影部位木構造保存部1713からなり、グループ分け処理部1711が撮影部位を分類した木構造を作成し、識別部1712は木構造に対応した識別器を生成し、作成された木構造と生成された識別器に従って撮影部位を識別する。画像処理部107は入力された画像に対して、識別された撮影部位に対応した画像処理として階調変換処理、エッジ強調処理などを施す。
(もっと読む)
車両用外界認識装置
【課題】パターンマッチにより歩行者を検知する際に、電柱,ガードレール,路面ペイント等の人工物に対する誤検知を、少ない処理負荷で低減することができる車両用外界認識装置を提供する。
【解決手段】自車前方を撮像した画像を取得する画像取得部(1011)と、その画像から歩行者を検出する処理領域を設定する処理領域設定部(1021)と、その画像から歩行者の有無を判定する歩行者候補領域を設定する歩行者候補設定部(1031)と、歩行者候補領域内の所定方向の濃淡変化量の割合に応じて歩行者候補領域が歩行者であるか人工物であるかを判定する歩行者判定部(1041)と、を備える。
(もっと読む)
カラー/白黒判定を行う印刷システム、印刷方法、プログラム
【課題】 モノクロのイメージを印刷する場合にカラー印刷する装置では、頁内のオブジェクトが全てモノクロであっても、カラー印刷されてしまう。
【解決手段】 モノクロイメージオブジェクトは基本的にカラー印刷するが、印刷対象の頁内にモノクロオブジェクトばかりが存在する場合には、例外的に、モノクロイメージオブジェクトを白黒印刷させる。
(もっと読む)
顔画像処理装置
【課題】顔の表情を自動的に判断し希望の画像を獲得することができる顔画像処理装置を提供する。
【解決手段】顔画像を含む人物の複数枚の画像を入力し、この入力された各画像ごとに人物の顔領域を抽出し、この抽出された各画像ごとの顔領域の表情の評価値を求め、この評価された評価値を用いて前記入力された画像内に表示された人物の顔の表情が撮影者が希望した表情となる画像であるかを各画像ごとに判定し、この判定結果を利用して前記複数枚の画像の中で人物の顔の表情が撮影者が希望した表情と判定された画像を選択して出力する。
(もっと読む)
321 - 340 / 2,013
[ Back to top ]