
Fターム[5B057DA17]の内容
Fターム[5B057DA17]に分類される特許
321 - 340 / 2,237
誤差取得方法および印刷装置

【課題】透明印刷媒体上に付着させるインクの付着量の誤差を精度よく取得する。
【解決手段】標準印刷装置と対象印刷装置により、白インクと黒インクと有彩色インクのそれぞれを単独で透明印刷媒体上に付着させることにより、白パッチと黒パッチと有彩色パッチとを透明印刷媒体上に形成し、前記透明印刷媒体を白色背景に設置した状態で前記黒パッチと前記有彩色パッチを測色し、前記透明印刷媒体を黒色背景に設置した状態で前記白パッチを測色し、前記標準印刷装置により形成した前記白インクと前記黒インクと前記有彩色インクの測色値と、前記対象印刷装置により形成した前記白インクと前記黒インクと前記有彩色インクの測色値との誤差を、前記白インクと前記黒インクと前記有彩色インクの付着量の誤差として取得する。
(もっと読む)
画像形成装置、制御方法、及びプログラム

【課題】従来の学習用出版物や、市販されている色ペン/マーカと色シートは、それぞれ専用の組み合わせが決まっていて、専用のものを使わないと、効果が出ず視認できてしまう場合がある。
【解決手段】色パッチを配置したテストシート(400)を印刷する印刷手段(50、502)と、前記テストシートの色パッチが配置された側に特定波長域の可視光線を透過する色シート(900)を重ねた状態で前記テストシートの画像を読み取る読み取り手段(30、501)と、前記読み取り手段にて読み取った第一のテストシートにおける色パッチの色または濃度に基づいて、ユーザが所望する色または濃度であるか否かを判定する判定手段と、画像を印刷するための色または濃度に対する、インクまたはトナー色材の配分量を演算する演算手段とを具備する。
(もっと読む)
モジュレータ、モジュレータを利用した光場データの取得装置、モジュレータを利用した光場データの処理装置及び方法
【課題】 モジュレータ、モジュレータを利用した光場データの取得装置、モジュレータを利用した光場データの処理装置及び方法を提供する。
【解決手段】 複数の画像について光場のデータを取得して処理する技術が開示される。1側面による光場のデータの取得装置は、ある画像の4次元の光場を空間変調する減衰パターンを含むモジュレータと、空間変調された4次元の光場の2次元信号を取得するセンサーとを含む。モジュレータの減衰パターンによって低い角周波数領域の空間データが高い角周波数領域の空間データに比べて多く取得される。
(もっと読む)
画像変換装置及び画像変換プログラム
【課題】上流工程からスクリーニングに関する情報を取得すること無く、印刷用のデジタル画像におけるスクリーニングの種類・特徴を判定し、判定結果に応じて画像を変換する画像変換装置を提供する。
【解決手段】画像変換装置20Aは、画像サーバ13から画像データを受け取ると、2値デジタル画像の幾何学的性質として、製版画像の一定面積毎の網点について、ドットの境界長・面積・数のうち少なくとも2つの特性に関する関数に基づいてスクリーニング及び線数の違いを判定し、当該エリアがAM/FMスクリーニングのどちらであるか等を判断する。画像処理部205Aは、2値デジタル画像の多値化・デスクリーニングを行い、変換部206Aに出力し、変換部206Aは、判定部203Aの判定結果に対応したプロファイルを記憶部201Aから選択して、画像処理部205Aが出力した画像からRGBIr基準画像を生成して、色調監視装置21に出力する。
(もっと読む)
画像処理装置、撮影装置及びプログラム
【課題】非線形補正が行われた画像に対してブラインドデコンボリューションを用いて画像回復を行う画像処理装置及びプログラムを提供することを目的とする。
【解決手段】本発明の画像処理装置は、非線形な階調補正が施された撮影画像に対して、非線形な階調補正を低減するように補正する補正部と、補正部により前記非線形な階調補正が低減された前記撮影画像に対して、ブラインドデコンボリューションを用いて画像回復する画像回復部とを含む。
(もっと読む)
画像処理装置、画像処理方法及び車載カメラ装置
【課題】車載カメラ装置において、小規模な回路構成、低コストで、異なる変形画像間のマーカー(車幅線、距離線など)の対応点を自動的に演算する。
【解決手段】座標変換により入力画像を変形するための座標計算を行う座標計算手段を用いて、異なる変形画像間のマーカー位置の対応点を求める。例えば、魚眼画像に起因する画像の歪みを補正した変形画像(ノーマルモード)におけるマーカーの座標値を、視点変換により真上から見た変形画像(見下ろしモード)に反映させる場合、座標計算手段を用いて、ノーマルモードにおけるマーカーの座標値(B)を一度、画像変形前の魚眼画像における対応する座標値(A)に変換し、その後、この座標値(A)を見下ろしモードにおける対応する座標値(C)に変換する。
(もっと読む)
画像判別装置
【課題】画像属性を判別するのに、メモリの容量を低減し、かつ、演算量を低減することができる画像判別装置を提供する。
【解決手段】画像の種別を示す画像属性を判別する画像判別装置であって、画像の所定数の画素からなる処理単位ごとに、エッジ方向の算出を行うエッジ算出部と、当該処理単位ごとに、算出されたエッジ方向に基づいて、周辺の処理単位とのエッジ方向の揃い度合いを示す局所連結性の強度を算出する局所連結性算出部と、画像の所定数の処理単位からなる属性判別領域ごとに、属性判別領域内の処理単位の局所連結性の強度を用いて、画像属性を判別する画像属性判別部とを備える。
(もっと読む)
膜を利用した色キャラクタライゼーション方法及びシステム
【課題】プリンタ、ディスプレイ等のカラー画像発生装置に関する特性調整に適した方法及びシステムを提供する。
【解決手段】面部分順方向パラメトリック色変換手段及び残余部分順方向非パラメトリック色変換手段を含む順方向色変換手段(10)を更新するため、アダプテーション用色入力値,計測値データセットに基づきパラメトリック色変換手段を適合的に改変し(20,26)、その結果と非パラメトリック色変換手段を用い第2色空間準拠の色予測値データセットを生成し(32)、その結果とアダプテーション用色入力値データセットに基づき第2色空間準拠の色予測誤差値データセットを生成し(34)、その結果に基づき膜利用順方向色変換手段を生成し(36)、非パラメトリック色変換手段及び改変版のパラメトリック色変換手段を用い順方向色変換手段を更新する(40)。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】指定色がガマット外の色又はガマット内の境界近傍の色である場合において、指定色の調整作業に要する時間を短縮できる画像処理装置、画像処理方法及びプログラムを提供する。
【解決手段】指定色の測色値(L*0,a*0,b*0)を基準色として設定するカラーチャート条件設定部84を有し、画像データ生成部62は、カラーチャート条件設定部84により設定された基準色(L*0,a*0,b*0)を中心として各カラーパッチ36をメディア32上に二次元的に形成するように、且つ、同一行又は列内において隣接する各カラーパッチ36同士の均等色空間上の色差が略等間隔(ΔL*,Δa*,Δb*)になるように計算された画素値からなる画像データを生成する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】広角カメラ特有のカメラ特性を考慮した、高画質及び高効率の画像圧縮を行うこと。
【解決手段】画像処理装置100は、カメラ部11によって得られた撮像画像を複数の領域に分割する領域分割部101と、領域分割部101によって分割された各領域画像を、撮像画像の所定の点から各領域画像までの距離l及びカメラ部11から各領域に含まれるターゲットまでの距離dに応じて圧縮率を変化させて圧縮する画像圧縮部105とを有する。例えば、画像圧縮部105が光軸からの角度が大きな領域画像ほど大きな圧縮率で圧縮することにより、低品質の領域のデータ量が大幅に減らされ、高品質の領域の品質を維持した圧縮が行われる。
(もっと読む)
画像処理システム、画像処理方法およびプログラム
【課題】撮像光学系の光学応答を補正する低コストな画像処理システムを提供すること。
【解決手段】撮像装置が撮像した複数の撮像画像上の異なる位置にそれぞれ撮像された画像から、それぞれ特徴量を抽出する特徴量抽出部と、特徴量抽出部が抽出した前記特徴量に基づいて、前記撮像装置が撮像した前記撮像画像または他の撮像画像から、前記撮像装置が有する撮像光学系による画像領域毎の光学応答の違いが補正された補正画像を生成する画像処理部とを備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】複数のフレーム画像に存在する特定の周波数のノイズ成分を効果的に除去する。
【解決手段】動画像を構成する各々のフレーム画像を、時間に沿って順次入力する画像入力部1と、画像入力部1からの動画像を複数の周波数帯域に分割する周波数分解部2と、分割した各動画像のなかで、特に時間に依存する分割した動画像の成分を消去または縮小する係数変更部3と、係数変更部3で消去または縮小した成分に基づいて、周波数分解部2とは逆の処理を行なうことで、周波数分解部2で分割した全ての動画像を再構成し、その再構成した動画像を時間毎に分割して、復元したフレーム画像を生成する画像再構成部4と、画像再構成部4で復元したフレーム画像を出力する画像出力部5と、を備えている。
(もっと読む)
画像処理装置
【課題】 原稿の地色や地模様等の背景を除去することのできる画像処理装置を提供する。
【解決手段】 輝度分布測定部301は、輝度を一定範囲ごとに所定数の段階に分けた輝度レベルを設け、画像データ前処理部20から入力されるカラー画像データの各画素を輝度に応じた輝度レベルに分け、各輝度レベルごとの画素数を計測する。ピーク検出部303は、輝度レベルの最も低いピークを原稿に記載された文字情報又は画像等に対応する輝度であると判別する。基準値決定部305は、原稿に記載された文字情報又は画像等に対応すると判別された輝度に基づいて、輝度レベルの最も高い白色に変換される輝度の基準値を決定する。背景除去部31は、基準値算出部30が算出した基準値より高い輝度の画素を印刷対象とならない白の画素に変換し、画像データ20により補正された画像から、背景除去が行われたモノクロ画像を生成する。
(もっと読む)
画像処理システム、画像処理装置、及びプログラム
【課題】画像変換を行うサーバに対して画像情報を秘匿したまま、変換に必要な情報を演算させる技術が望まれている。
【解決手段】予め定められた座標に標識画像が付された画像を、処理対象画像として受け入れ、当該受け入れた処理対象画像から、標識画像の処理対象画像上での座標を表す情報を抽出して抽出情報を生成する。変換処理装置に対して、生成した抽出情報を送信して変換用情報を受信し、当該受信した変換用情報を用いて、処理対象画像に対する変換処理を実行する。
(もっと読む)
経時的な動的挙動に基づくパラメトリック画像
データ処理方法は、分析期間の臓器を表す一連インプット画像を提供するステップであって、個々のインプット画像は、分析期間内の対応する取得瞬間における臓器の対応する位置の呼掛信号に対する応答を、各々が示すインプット値のセットを含む、ステップと、選択された位置のセットの内の各々と時間に関する分析関数を関連付けるステップであって、分析関数は一連インプット画像内の選択された位置のインプット値の傾向をモデル化する、ステップと、分析関数に対して時間に関する参照関数を提供するステップと、個々の選択された位置の分析関数を、選択された位置の分析関数と参照関数との間の発散の極性の分析期間における傾向を表す極性傾向を判別する参照関数と比較するステップと、個々の選択された位置に対するパラメトリック値を含むパラメトリック画像を生成するステップであって、パラメトリック値は選択された位置の極性傾向を示す、ステップとを含む。 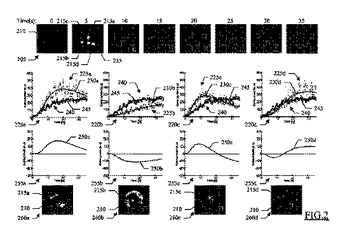 (もっと読む)
(もっと読む)
画像処理方法および画像処理装置
【課題】モノクロ画像のより鮮やかなカラー化を実現する。
【解決手段】モノクロ画像の各画素に対して、次の(a)〜(d)を満たすように当該画素の明るさを表す画素値に応じて色を決める。(a)画素値のとり得る数値範囲内の最小値には黒色が対応し、画素値が大きいほど明度の大きい色が対応し、最大値には白色が対応する。(b)最小値付近の画素値には青色域の色が対応する。(c)最大値付近の画素値には黄色域の色が対応する。(d)最小値付近から最大値付近までの画素値には、青色域から赤色域を経て黄色域へ至る色相範囲内の色が対応し、または青色域から緑色域を経て黄色域へ至る色相範囲内の色が対応する。
(もっと読む)
立体画像生成装置
【課題】立体画像に対してより立体感を出せ、水系を容易にたどれる視覚化立体地図を得る。
【解決手段】DEMデータ作成部6と、DEM読込間隔設定部7と、パラメータ計算部8と、立体赤色マップ作成部20と、傾斜画像階調補正部22と、地上開度画像階調補正部23と、地下開度画像階調補正部21と、L*チャンネル化部26と、b*チャンネル化部25と、a*チャンネル化部27と、L*a*b*カラー式画像化部と、階調補正部29と、XYZ表色系変換部と、RGB表色系変換部31と、合成部32と、微調補正部33、傾斜スペクトラム算出部52と、地下開度スペクトラム算出部51と、地上開度スペクトラム算出部53等を備えて、画像を地下開度が高い谷や窪地をシアン色に、地上開度の大きい尾根や頂上を赤色に調整し、この地上開度−地下開度調整画像を、赤色立体地図と重ねあわせ合成することによって画像(KLi)を得る。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】画像データに有彩色が含まれている場合はその画像データに含まれているグレーを複数色の濃度の組み合わせで表現し、有彩色が含まれていない場合は黒単色の濃度で表現する場合において、より早い段階で変換データを出力できる画像処理装置を提供する。
【解決手段】画像処理装置は、有彩色を含む部分データより前にグレーを含む部分データを取得した場合は出力を待機し、待機開始後に有彩色を含む部分データを取得した場合は、グレーを複数色の濃度の組み合わせによって表現した変換データである複数色変換データを出力する一方、待機開始後に有彩色を含む部分データを取得することなく画像データの取得が終了した場合は、グレーを黒単色の濃度で表現した変換データである黒単色変換データを出力し、有彩色を含む部分データを取得した場合はそれ以後に取得する部分データを複数色変換データに変換して出力する。
(もっと読む)
画像変換装置および画像変換プログラム
【課題】操作者が筆記した文字や線などの筆跡を、筆跡の領域幅、止め、はらいなどを含め、光学撮像方式により筆記された状態のまま記録することができる画像変換装置および画像変換プログラムを提供する。
【解決手段】記録媒体12には座標位置を示す図形が規則的に配置されている。座標位置特定部23は、筆記具11内の撮像部21によって撮像された撮像画像から図形を抽出し、座標位置を特定する。また図形読取部24は、撮像画像内の図形の数を特定する。一方、接触状態検出部22は筆記具11と記録媒体12との接触状態を検出する。対応付け部25は、特定された座標位置から算出された筆記速度と接触状態の検出結果とともに、図形の数の増減から、筆記された筆跡の領域幅を制御し、座標位置と対応付けて筆跡の情報を筆跡記録部26に記録する。
(もっと読む)
位置計測システム、位置計測用演算装置およびプログラム
【課題】 撮像装置で撮像した物体の位置計測用の基本標識を識別用の識別標識と混同することなく位置計測を行うことができる位置計測システム、位置計測用演算装置およびプログラムを提供する。
【解決手段】 位置計測システムは、平面上に幾何学的形状として四角形を形成する位置関係の分かっている4つの基本標識a1,b1,c1,d1および平面上に配置される識別標識a2を有する物体1と、2次元撮像素子2を有する撮像装置3と、撮像装置3により撮像した基本標識および識別標識の画像情報から得られた直線上の4点を利用して複比を計算し、計算した複比に基づいて4つの基本標識a1,b1,c1,d1を識別し、識別した4つの基本標識a1,b1,c1,d1の位置情報に基づいて物体1の3次元位置および角度の少なくとも一方を求める演算を行う演算装置4とを備える。
(もっと読む)
321 - 340 / 2,237
[ Back to top ]