
Fターム[5B057DB01]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 一次元 (32)
Fターム[5B057DB01]に分類される特許
1 - 20 / 32
3次元計測装置と3次元計測方法
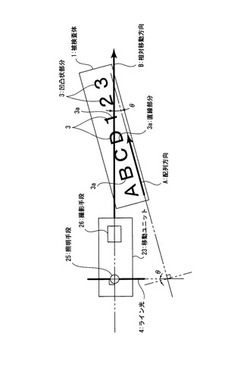
【課題】ライン光が撮影手段に向けて正反射されることがなく、撮影が困難になることを防止する。
【解決手段】被検査体1にライン光4を照射して両者を相対移動させながら撮影手段26で撮影することにより、光切断法によって被検査体1を3次元計測することができる。上記被検査体1は、ワークに予め定められた配列方向Aに配列して設けられた複数の凹凸状部分3を有しており、この凹凸状部分3は、上記配列方向Aと直交する方向の直線部分3aを有している。上記ライン光4の相対移動方向Bと、この相対移動方向に対するライン光の角度θとは、該ライン光4が上記直線部分3aに対して斜めに交差して照射されながら相対移動されるように予め設定されている。
(もっと読む)
画像評価装置、画像評価プログラム、画像評価方法

【課題】端部を含めたバンディング評価を適切に行うことができる画像評価装置、画像評価プログラム、画像評価方法を提供すること。
【解決手段】バンディング評価の対象となる画像から1次元信号を抽出し(図4(a))、その1次元信号を、その1次元信号の1周期である20mmの4倍で切り出すことで(図4(d))、その切り出した1次元信号の両端の差が軽減され、その1次元信号を離散フーリエ変換することに伴い発生するエッジ効果が抑制される。即ち、切り出した1次元信号の両端の情報を欠落させずに、エッジ効果を抑制できる。従って、図4(d)に示す1次元信号を離散フーリエ変換しても、端部の情報を保持したまま、エッジ効果が抑制されるので、端部を含めたバンディング評価が適切に行われる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び、波形データ処理装置
【課題】画像処理を規定するパラメータを適正に調整する。
【解決手段】CPU11は、文字列を構成する少なくとも1つの文字の認識が失敗したか否かを判定する成否判定部113と、成否判定部113によって文字列を構成する少なくとも1つの文字の認識が失敗したと判定された場合に、文字の認識が失敗した原因を推定する原因推定部116と、原因推定部116によって推定された原因に基づいて、画像処理を規定する複数のパラメータのうち、推定された原因に対応する少なくとも1つのパラメータの値を修正する処理修正部117と、を備える。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
路面画像生成車両、路面画像生成装置、及び、路面画像生成方法
【課題】車両を曲線に沿って走行させた場合に、曲線に沿った路面の画像を生成することができる技術を提供する。
【解決手段】繰り返し路面を撮影する路面撮影手段と、第1視野範囲62内の路面を撮影する第1ラインカメラ14と、第1視野範囲と交差する第2視野範囲60内の路面を撮影する第2ラインカメラ16と、第1タイミングで第1ラインカメラと第2ラインカメラで路面を撮影し、第2タイミングで第1ラインカメラと第2ラインカメラで路面を撮影し、第1タイミングの第1ラインカメラの撮影画像と第2タイミングの第2ラインカメラの撮影画像との一致点を特定し、第1タイミングの第2ラインカメラの撮影画像と第2タイミングの第1ラインカメラの撮影画像との一致点を特定し、第1の一致点と第2の一致点に基づいて路面撮影手段で撮影された画像を配列する手段を有する路面画像生成車両10。
(もっと読む)
電子透かし情報の抽出装置
【課題】 フレーム境界探索処理を行わず、少ない演算量でキャリア信号から効率的に電子透かし情報のシンボルを抽出する。
【解決手段】 時間/周波数変換部21は、Nサンプルからなるフレーム毎に1シンボルずつ電子透かし情報が埋め込まれたキャリア信号を受け取り、N/2サンプルからなるサブフレームに分割する。相関算出部24は、各サブフレームとシンボルを示す各サブ基準信号との各相関度を各々算出する。相関判定部25は、サブフレーム毎に各サブ基準信号との各相関度の中から最も高いものを選択し、その相関度が閾値を越えている場合には、その相関度の得られたサブ基準信号に基づき当該サブフレームのデコード結果を求める。また、相関判定部25は、奇数番目のサブフレーム、偶数番目のサブフレームの各グループのうち閾値以上の相関度の発生個数が多いグループのデコード結果を選択する。
(もっと読む)
表面計測方法及び装置
【課題】計測対象物の平面部と凹部とを正確に分離可能な表面計測装置を実現する。
【解決手段】計測点読取処理110が読み取った計測点データは範囲外点排除処理111で範囲外データが排除される。最頻点抽出処理112は抽出した計測点データから最小二乗法で直線を作成し計測点と直線との差を作成する。ヒストグラムを作成し第1の閾値と平均値を算出し閾値と平均値とが同一とみなせるかどうかを判定する。同一ではない場合、閾値以下の計測データを排除し、直線近似から再処理を行い、閾値と平均値とを再度算出する。算出した閾値と平均値とが同一とみなせるまで処理を繰り返し実行する。
(もっと読む)
監視カメラ画像を用いた連動表示計測システム
【課題】段階的な手段をとらなくとも一目で監視カメラ画像、三次元画像、平面図画像上での指定個所をそれぞれの画像上で正確に直に提供できる単眼視の監視カメラ映像を用いた連動表示計測システムを得る。
【解決手段】カメラ選択部31と、モード判定部32と、画角設定部33と、表示処理部34と、カメラ画像指定個所連像表示部11と、GIS画像指定個所連動表示部12と、平面図指定個所連動表示部13等を備えて、対象範囲が数キロに亘る広範囲で撮影されたカメラ画像を三次元地形モデルに対応付けて、その監視カメラが撮影した三次元GIS画像並びに平面図画像を連動表示すると共に、いずれかの画像(カメラ画像、三次元GIS画像若しくは平面図画像)上の指定位置(カーソル)を各々の画像上に連動表示し、かつその指定位置の三次元座標を知らせる。
(もっと読む)
ラインスキャンカメラを使用してオンラインウェブを監視するシステム及び方法
様々な実施形態は、流れ方向(118)に装置に対して移動するオンライン製品ウェブを検査する装置を目的とする。装置は、視野(114)を画定し、視野が製品ウェブ(208)の部分を含むように配置されるラインスキャンカメラ(102)を含み得る。カメラ制御システム(104)は、カメラ(102)と電子通信し得、ウェブ速度センサ(110)から製品ウェブの速度を示すウェブ速度データを受信し、ウェブ速度データをライントリガ信号に変換するように構成され得る。ライントリガ信号は、流れ方向に不断の画素解像度を達成するために必要なカメラ画像キャプチャの時間周波数を示し得る。更に、カメラ制御システム(104)は、製品位置データを受信し、製品位置データを考慮するフレームトリガ信号を生成するように構成され得る。フレームトリガ信号は、画像フレームと画像フレームとの間で中断を示し得る。 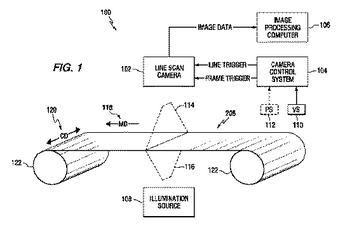 (もっと読む)
(もっと読む)
撮像装置、ストロボ画像生成方法、および、プログラム
【課題】ストロボ画像を高速に生成する。
【解決手段】撮像部100の連写動作により画像メモリ230に格納された連写画像を、1次元データ生成部213が、被写体の移動方向に応じた1方向に投影することで、データ量の少ない1次元データに変換する。被写体検出部214が、生成された1次元データに基づいて、各撮像画像において被写体を示す部分を検出すると、画像選択部215が、検出された被写体部分が重ならない画像を有効フレームとして選択する。1次元データに基づいて有効フレームが選択されると、有効フレームの画素値を用いて背景画像生成部216が背景画像を生成するとともに、被写体検出部214が、各有効フレームの被写体部分を抽出する。抽出された被写体画像と背景画像をストロボ画像生成部217が合成することで、ストロボ画像が生成される。
(もっと読む)
キャリア信号から電子透かし情報を抽出する装置、方法およびプログラム
【課題】 少ない演算量で、迅速にキャリア信号における電子透かし情報の埋め込み区間を探索し、埋め込み区間内の電子透かし情報を抽出する。
【解決手段】 抽出装置200の概略同期探索部272は、キャリア信号において同期シンボル列に対応した変調信号との相互相関の評価の対象となる評価区間を粗いステップでシフトしながら、キャリア信号における同期シンボル列の埋め込み区間の概略的な位置の探索を行い、詳細同期探索部273は、この概略的な位置を初期値として、評価区間を細かいステップでシフトしながらキャリア信号における同期シンボル列の埋め込み区間の詳細な位置の探索を行う。
(もっと読む)
読取装置、コンピュータプログラム及び読取システム
【課題】読み取るべきでないデータが読み取られた場合であっても、必要なデータのみを採用することができる読取装置、コンピュータプログラム及び読取システムを提供する。
【解決手段】リーダライタ2により、通信可能な領域内にあるICタグ3からICタグ3に記録されたデータを非接触で繰り返し読み取る。リーダライタ2が読み取ったデータを管理装置1に送信する。管理装置1において、読取結果を時系列にした読取データを生成するし、生成した時系列データに基づいて、読取結果の特徴を示す特徴データを生成する。生成した特徴データに基づいて、読み取ったデータを必要データ又は不要データに分類することで、ICタグ3を対象タグ又は不要タグに分類する。
(もっと読む)
画像読取装置及び画像形成装置
【課題】簡単な構造且つ低コストで、複数列設されたラインイメージセンサの重複部のずれを検出して複数の画像データを1つの画像データに結合する。
【解決手段】原稿が配置されるコンタクトガラス120と、原稿Dからの反射光による原稿像を結像する結像レンズ111a、111bと、近接して配置される端部において前記原稿像を主走査方向に重複して読み取る複数のラインイメージセンサ112a,112bと、重複して読み取られた画像データを連結して連続した画像データにする画像読取装置において、前記重複して読み取られる領域に位置するコンタクトガラスにコンタクトガラスの透過光量を低減する光量低減部を形成し、前記重複して読み取られた画像データの信号強度を補正する画像信号合成装置130を設けた
(もっと読む)
アナログ式メータの読取方法、読取装置および読取システム
【課題】カメラを用いたアナログ式メータの自動読取方法に関して、処理データを削減するとともに、簡単で確実にメータの指示値を読取る方法を提供する。
【解決手段】指針式メータを撮像した2次元の画像データから半径RADの円周上の画素データを抽出する(ステップS50)。次に、抽出した1次元データの各画素の輝度信号に基づいて、しきい値を計算する(ステップS80)。次に、しきい値を基準に指針に対応する画素を判定し(ステップS90)、指針の指示値を読取る(ステップS100)。このように、1次元データに応じてしきい値を設定するので、メータの設置場所や気象条件などの影響を受けずに確実に指示値を判定することができる。また、好ましくは、各画素の輝度信号および色差信号の両方に基づいてしきい値を求める。
(もっと読む)
ビジネス顕微鏡システム
【課題】組織を構成する人物間の関係性を数値化する。
【解決手段】複数の端末と、前記複数の端末から送信されたデータを処理する処理装置と、を含むセンサネットシステムであって、前記各端末は、物理量を検出するセンサと、前記センサが検出した物理量を示すデータを送信するデータ送信部と、を備え、前記処理装置は、第1の前記端末から送信されたデータ及び第2の前記端末から送信されたデータに基づいて、前記第1の端末を装着した第1の人物と、前記第2の端末を装着した第2の人物との関係を示す値を算出する。
(もっと読む)
画像形成装置
【課題】一部重複域を有する複数のレーザ露光部を備えた画像形成装置において、一部重複域に僅かな濃淡パターンができる場合でも、複雑な光変調器の変調調節を行うことなく、一部重複域の濃淡パターンを視認できないものにすることができる。
【解決手段】互いに隣接するレーザ露光部11、12、13を用いて各分担走査域に画像形成を行わせる画像形成手段(出力コントロール部205)と、一部重複域に形成された画像から得られる該一部重複域における濃淡パターンと同一の濃淡パターンを、一部重複域と同間隔で、かつ第1の方向と直交する第2の方向に設定するシェーディング補正手段とを備え、画像形成手段は、シェーディング補正手段によって設定された濃淡パターンに従って画像データを補正する。
(もっと読む)
補正値取得方法及び印刷方法
【課題】補正値の取得の手間を軽減する。
【解決手段】本補正値取得方法は、基準パターンをスキャナで読み取る基準読み取りステップと、前記基準パターンとプリンタの印刷した第1テストパターンとを前記スキャナで読み取る第1読み取りステップと、前記プリンタの印刷した第2テストパターンを前記スキャナで読み取る第2読み取りステップとを有する補正値取得方法であって、検査対象となるプリンタ毎に、前記第1読み取りステップと前記第2読み取りステップとを繰り返し行い、前記第1読み取りステップの読み取り結果に基づいて、前記プリンタの第1補正値を取得し、前記基準読み取りステップの読み取り結果と前記第2読み取りステップの読み取り結果とに基づいて、前記プリンタの第2補正値を取得する。
(もっと読む)
補正値取得方法及び印刷方法
【課題】補正値の取得の手間を軽減する。
【解決手段】本補正値取得方法は、搬送量を補正するための第1テストパターンを印刷する第1印刷ステップと、前記第1テストパターンをスキャナで読み取る第1読み取りステップと、前記第1読み取りステップの読み取り結果に基づいて前記搬送量を補正するための第1補正値を算出する第1補正値算出ステップと、前記第1補正値に基づいて前記搬送量を補正しつつ、移動方向に移動するノズルからインクを吐出して前記移動方向に沿う列領域にドット列を形成することにより、搬送方向に並ぶ複数の前記列領域に形成された複数の前記ドット列から構成されるテストパターンを印刷する第2印刷ステップと、前記第2テストパターンを前記スキャナで読み取る第2読み取りステップと、前記第2読み取りステップの読み取り結果に基づいて、各前記列領域に対応する第2補正値をそれぞれ算出する第2補正値算出ステップとを有する。
(もっと読む)
耐周囲光ノイズ用デジタル化回路
比較的大きな周囲光の中でバーコード又は類似の記号からデータを引き出す装置及び方法を開示する。その装置は、入力信号の値によって、負のオフセット信号の上部、又は正のオフセット信号の下部に追従するスライス信号を使用する。そのシステムはデジタル又はアナログのハードウェアにおいて実施することができる。 (もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】パノラマ画像を容易に撮影することができるようにする。
【解決手段】ディジタルカメラ1にはX−Yアドレス型の撮像素子と、それぞれのラインの露光時に撮像素子に加えられた変位を検出するセンサが設けられている。その撮像素子においては、ライン単位で露光が行われ、ユーザは、露光を行うラインの切り替え方向と同じ方向にパンしながら撮影を行う。それぞれのラインの露光のタイミングが異なることによって、撮像結果の1枚の画像には、広い範囲の被写体が縮まった状態で取り込まれる。撮像結果の1枚の画像を、センサによって検出された変位に応じて拡大することによって1枚のパノラマ画像が生成される。本発明は、X−Yアドレス型の撮像素子と変位を検出するセンサが設けられている機器に適用することができる。
(もっと読む)
1 - 20 / 32
[ Back to top ]