
Fターム[5B057DC04]の内容
Fターム[5B057DC04]に分類される特許
21 - 40 / 997
画像処理方法及び画像処理装置
【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
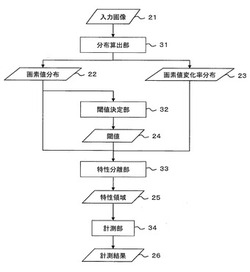
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
(もっと読む)
シワ検出方法、シワ検出装置およびシワ検出プログラム、並びに、シワ評価方法、シワ評価装置およびシワ評価プログラム

【課題】被験者の顔を撮影した画像からシワを検出する際に誤検出を低減することができるシワ検出方法を提供する。
【解決手段】被験者の顔データを取得し、取得された顔データの所定の部位に解析領域を設定し、設定された解析領域に対して、顔の所定の部位毎に予め設定されたシワの延びやすい角度範囲内の一方向若しくは互いに異なる複数の角度で延びるシワ成分をそれぞれ抽出した複数のシワ成分抽出データを生成し、複数のシワ成分抽出データのそれぞれに対してシワ成分を強調した複数のシワ成分強調データを生成し、複数のシワ成分強調データを互いに合成した合成データを生成し、合成データにおいて所定の閾値以上の強度を有するシワ成分を被験者のシワとして検出する。
(もっと読む)
正しい機器使用姿勢誘導装置及び方法
【課題】 ユーザが正しい姿勢を保持するように補助する装置及び方法を提供する。
【解決手段】 正しい機器使用姿勢誘導装置は、携帯端末で撮影されたユーザの顔映像、携帯端末の傾斜角度またはその組み合わせのうちの少なくとも1つを用いて、ユーザが、携帯端末を正しい姿勢で使っているか否かを判断する判断部と、判断部の判断の結果によって、ユーザが、携帯端末を正しい姿勢で使っていない場合、所定の警報を発する警報実行部と、を含む。
(もっと読む)
画像診断支援システム
【課題】断層画像内に複数の領域を設定して、被験者及び特定グループに属する者の断層画像を比較し、被験者が所定の疾患であるか否かを鑑別するための支援をする。
【解決手段】
本発明の一つの態様に従う画像診断支援システムは、
被験者データ記憶部11と、健常者データ記憶部12と、断層画像内の複数の領域を示す領域データを記憶する領域データ記憶部20と、被験者の断層画像と健常者の断層画像とを比較し、複数の領域のそれぞれについて、被験者の断層画像が健常者の断層画像と異なる特徴を有する特徴領域であるか否かを判定する手段15,17,18と、疾患別の鑑別データを記憶する鑑別データ記憶部21と、判定結果と鑑別データとを比較するマッチング部19とを備える。
(もっと読む)
画像処理装置及びカメラ
【課題】画像処理によって生じる不自然さを抑制しつつ、人物の顔の印象を積極的に改善する画像補正を実施可能な画像処理装置等を提供する。
【解決手段】デジタル画像から、人物の目が写っている領域である目領域を抽出する目抽出部44と、前記目領域に対して、黒目の白目に対する比率が大きくなるように、前記目領域に補正処理を実施する色補正処理部70と、強膜領域を抽出する第1領域抽出部50と、瞳孔及び虹彩を抽出する第2領域抽出部60と、境界を縁取りする形状を有する補正予定領域を算出する補正領域算出部66と、色補正処理部を有する画像処理装置。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】色の劣化が生じた画像からでも、もともとの色領域を正確に抽出することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】前景特徴量算出部11は、それぞれの画素を対象画素として、その対象画素を含む予め決められた範囲の画素の色に対する対象画素の色の違いを示す特徴ベクトルを、予め決められた範囲の画素の色の平均色から対象画素の色への色空間におけるベクトルとして算出する。統合判定部12は、統合対象の二つの画素または領域についての前景特徴ベクトルの類似度に従って、統合の可否を判定する。領域統合部13は、統合判定部12で統合すると判定された二つの画素または領域を1つの領域に統合する。統合する際には、統合後の領域の前景特徴ベクトルを算出しておく。終了判断部14で終了条件を判定し、終了でない場合には統合判定部12に戻って、終了条件が満たされるまで処理を繰り返す。
(もっと読む)
画像処理装置及びカメラ
【課題】人物の髪の毛に対して、自動的に好ましい画像処理を行うことができる画像処理装置等を提供する。
【解決手段】デジタル画像から、人物の髪の毛が写っている領域である髪エリアを抽出するエリア抽出部と、前記髪エリアの輝度又は明度の分布を算出する明るさ算出部と、前記分布を用いて、前記髪エリアの中から、前記髪エリアにおける輝度又は明度の最頻値又は平均値に対して、所定値以上高い輝度又は明度を有する明部を検出する明部検出部と、前記明部の検出結果に応じて、前記髪エリアに対して画像補正を実施する補正部と、を有する画像処理装置。
(もっと読む)
細胞画像解析装置、細胞画像解析方法、及び細胞画像解析プログラム
【課題】剥離細胞と接着細胞との重なりを考慮せずに、細胞剥離性能を高精度に評価する。
【解決手段】細胞と液体とを含む系に動きを与えた状態から、前記細胞が静止するまでの状態を動画撮影した動画ファイルのフレームのうち、前フレームとの画素の差分値が所定の値以上である動きエリアを抽出する動きエリア抽出部を有することを特徴とする細胞画像解析装置。
(もっと読む)
画像評価装置、撮像装置およびプログラム
【課題】 簡易な操作で画像の評価にユーザの嗜好を反映させる。
【解決手段】 画像評価装置の画像評価部は、各々の候補画像から特徴量を抽出するとともに、特徴量を変数とする評価式を用いて複数の候補画像のうちから代表画像を選出する。表示処理部は、代表画像および複数の候補画像を表示装置に表示させる。入力部は、候補画像のうちから最適画像の指定を受け付ける。学習処理部は、代表画像の選出後に最適画像の指定があったときに、最適画像が代表画像として選出されるように評価式を調整する。
(もっと読む)
画像処理装置、積分画像作成方法及びプログラム
【課題】積分画像の格納に必要な記憶容量を削減できる画像処理装置、積分画像作成方法及びプログラムを提供することを課題とする。
【解決手段】画像処理装置であって、画像を分けたブロック単位で、ブロックに含まれる1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値を格納した記憶手段と、ブロックに含まれる全ての座標の面積積分値を、記憶手段から読み出した1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値により算出する制御手段とを有することにより上記課題を解決する。
(もっと読む)
診断支援装置およびその制御方法、診断支援システム、プログラム
【課題】符号化されたデータから診断に有効な領域を優先的に読み出すことを可能とし、必要な画像を迅速に取得可能とする。
【解決手段】初期ストリーム設定部18及び入力制御部14の制御により、画像入力部11は、符号化画像データストリームのうち、まず、診断支援処理を可能とする低画質画像を再生可能な分を取り込む。懲り込まれたデータストリームは、復号化部12で復号化され、得られた2次元画像13が診断支援部16で解析されて陽性領域17が決定される。そして、入力制御部14が陽性領域17の部分を優先して取り込むべく画像入力部11を制御することにより、診断に有効な領域が優先的に取り込まれ、詳細に再生される。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】画像認識処理を行う範囲として認識地物単位毎に設定される認識要求範囲を取得する認識要求範囲取得部27と、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に認識率を決定する認識率決定部26と、認識要求範囲が互いに重複する複数の認識地物単位の中から認識率に基づき認識対象とする認識地物単位を選択する認識対象選択部25とを備え、認識率決定部26は、道路長さ方向に分かれて配置された地物群からなる特定認識地物単位について、各時点での各地物の画像認識結果に応じて、当該特定認識地物単位を構成する複数の地物の一部が画像認識された場合には当該特定認識地物単位を構成する残りの地物の予想認識率ERに基づき認識率を決定する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
画像処理装置、撮像装置、画像処理プログラム、および、記録媒体
【課題】画像処理における設定値をユーザの好みに合わせて変更することができる画像処理装置を提供する。
【解決手段】画像処理装置が、画像データが予め記憶されている画像データ記憶部から読み出した画像データから特徴量を抽出し、当該抽出した特徴量に基づいて、画像の特徴を示す特徴量に対しての設定値を生成する第1の設定値生成部と、対象画像データに対して、第1の設定値生成部により生成された設定値に基づいて画像処理する画像処理部と、を備えている。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置
【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】画像から検出された注目領域が優先的に観察すべきものであるか否かを分類することができる画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】画像処理装置は、画像内に含まれる注目領域を複数の分類項目に分類する画像処理装置において、注目領域の少なくとも一部を検出して初期領域として設定する初期領域検出部110と、初期領域を拡張することにより拡張領域を検出する拡張領域検出120と、初期領域及び拡張領域の特徴量を算出し、該特徴量に基づいて注目領域が複数の分類項目の内のいずれに相当するかを判定する領域判定部130とを備える。
(もっと読む)
対象物検出装置、撮像装置及び画像処理プログラム
【課題】画像内から顔を検出する際の過検出を抑制すること。
【解決手段】ユーザが被写体登録用に撮像をする際に顔検出処理部22により画像から顔検出を行い、検出された顔のサイズ、撮像装置10から被写体までの距離、及び撮像時のズーム倍率を記憶しておき、本撮像モードにおいては、撮像装置10から被写体までの距離及びズーム倍率と登録時に記憶された情報とより推定顔サイズ算出部26にて画像上の推定顔サイズを算出し、顔サイズ比較部28にて、この推定顔サイズと該本撮像モードにおいて顔検出処理部22による顔検出で検出された顔領域のサイズとを比較し、両者がほぼ一致した場合に、顔領域決定部30が該本撮像モードにおいて顔検出処理部22による顔検出で検出された顔領域を顔領域として決定することで、過検出を抑制する。
(もっと読む)
監視システム、および、混雑率算出方法
【課題】監視システムで、列車の車内などを効果的に監視する。
【解決手段】監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、車両内に存在する人物を検出し、その人物が車両をどれくらい占める割合で検出されたかにより、乗車率Aを判定する。また、監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、乗降車する人数を計測し、最大乗車可能人数に対する現在乗車している人数により、乗車率Bを判定する。そして、これら2通りの方法で算出された乗車率から、平均値を取る等して精度の高い乗車率を判定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】絵画調に変換する画像処理に要する時間を短縮するとともに、特定の被写体のみを絵画調にすることで、鮮明な写真画像と感性が入った絵画調画像とが融合し、両者単独の画像では味わえない特別な味わいをユーザに覚えさせる装置を提供する。
【解決手段】CPUは、画像データを取得し、所定の範囲を規定し、ステップS22の処理を実行することで所定の範囲内において画像の輪郭線を抽出し、ステップS24の処理を実行することで輪郭線により形成された閉曲線を選択する。画像処理部及びCPUは、ステップS25の処理を実行することで閉曲線で囲まれた部分のデータを絵画変換する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
21 - 40 / 997
[ Back to top ]