
Fターム[5B057DC13]の内容
Fターム[5B057DC13]に分類される特許
161 - 180 / 188
車線認識装置

【課題】撮像された車輌前方の画像中から自車輌が走行する車線を的確に検出し、特に、急なカーブ等の複雑な道路形状や路面の汚れ、雨天等に影響され難く安定して車線を検出するとともに、車線分岐等をも的確に認識可能な車線認識装置を提供する。
【解決手段】車線認識装置1は、自車輌の進行路を撮像する撮像手段2と、撮像画像の設定領域における実空間上の距離Lを算出する画像処理手段6と、車線を検出する検出手段9とを備え、検出手段9は、輝度pnijと距離Lに基づいて道路面上の画素を車線候補点として検出し、車線候補点に対してハフ変換を行い、ハフ変換により得られる直線の中から少なくとも自車輌の位置又は挙動に基づいて車線としてふさわしい直線r1、l1を自車輌の左右に1本ずつ検出し、直線r1、l1を基準として車線候補点の中から車線ポジションを記録していくことで直線状または曲線状の車線LR、LLを検出する。
(もっと読む)
三次元位置測定装置及びソフトウエアプログラム

【課題】 装置の設置作業を簡略化することのできる三次元位置測定装置及びソフトウエアプログラムを提供する。
【解決手段】 対象領域の第1の平面と第2の平面にパターンを形成するパターン光を投影する投影装置11と;パターン光が投影された、対象物の存在する対象領域を撮像する撮像装置12と;対象領域に対象物が存在しないときに第1の平面と第2の平面に投影されたパターン光を基準として、撮像された像上のパターンの移動を測定し、該測定されたパターンの移動に基づいて、対象物に投影されたパターン光の三次元位置を算出する測定手段14と;パターン光11bの投影範囲に比較して十分に広いものと仮想した仮想平面に投光され、投影装置11と撮像装置12との光学配置に基づいて算出される仮想のパターン光と、実際に撮像されるパターン光とを比較して、第2の平面での基準の位置を算出する基準位置算出手段24を備える三次元位置測定装置。
(もっと読む)
画像歪み補正装置
【課題】実際の寸法を要する照合処理等に非固定式イメージスキャナで撮影した画像を利用できるようにする手段を提供する。
【解決手段】画像を撮影する画像撮影手段と、撮影された紙葉類の画像の歪みの補正処理を実行する制御部とを有する画像歪み補正装置において、撮影される紙葉類の下に敷く基準マットを設け、制御部は、基準マットの実際の寸法の頂点である実寸頂点の座標を格納する手段と、画像撮影手段により撮影された基準マットを含む紙葉類の画像を取得する手段と、取得した画像の基準マットの頂点である画像頂点の座標を検出する手段と、画像頂点の座標を実寸頂点の座標と一致させるように画像頂点の座標を変換する手段と、画像頂点の座標変換に基づいて、紙葉類の画像を実際の寸法に補正する手段とを備えることを特徴とする。
(もっと読む)
直線検出装置、直線検出方法およびそのプログラム
【課題】 直線上の点のばらつきが大きい場合でも直線を検出することができるようにする。
【解決手段】 画像データから実空間における直線上の候補点を検出し、候補点の座標値をハフ空間に投影して、ハフ空間上の曲線LSを求める。ハフ空間内を所定の大きさで区分けした小区間ΔDを複数まとめた検出区間Mを複数設定し、各検出区間M内を通過する曲線LSの数をカウントして、検出区間M内を通過する曲線LSの数が第1の閾値を越えた検出区間M内のいずれかの小区間ΔDの座標値を用いて、実空間上の直線を求める。
(もっと読む)
画像処理方法および装置
【課題】
形状特徴を用いて条件変化に安定な背景差分やパターン認識を行うために、注目画素から安定な画素を選択して、注目画素の周辺のパターン形状を表す特徴ベクトルを算出する画像処理方法および装置を提供することにある。
【解決手段】
カメラからの信号入力部,入力信号から基準画像を作成または更新し、入力画像との比較を行いオブジェクトの検出行う画像処理部,検出結果を利用する出力部および特徴ベクトルを算出する特徴ベクトル部を備え、条件変化に対して安定な画素を選択して注目画素との対を構成し、注目画素と特徴画素との距離と方向を表すベクトルを算出する機能を備え、そのベクトルの長さの大小関係を符号化した特徴ベクトルの比較を行うことにより高速で安定したパターン検出や画素の類似度判定を行うことができる。
(もっと読む)
障害物検知装置及びその方法
【課題】自動車の安全運転支援や自動走行を実現するための技術であって、車両に搭載されたカメラを用い、先行車、駐車車両、歩行者等、道路上に存在する障害物を、走行上の障害とならない路面上の白線や標識といったテクスチャ、路側のガードレール等の物体から区別して検知する障害物検知装置を提供する。
【解決手段】障害物検知装置10は、複数の撮像装置からの画像を入力・蓄積する画像入力部11と、前記蓄積されている画像から予め定められた任意の画像特徴量を算出する特徴算出部12と、複数の撮像装置からの画像の特徴量を比較する特徴比較部13と、前記特徴比較部13にて得られた比較結果から障害物の有無を判定する結果判定手段14とからなる。
(もっと読む)
物体認識方法及び装置
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体の表面形状情報を検出し、この物体の輪郭形状を認識する物体認識方法であって、表面形状情報を構成する標本群から任意の標本を抽出する標本抽出工程#1と、抽出した標本に基づいて形状モデルを定める形状モデル設定工程と、形状モデルに対する標本群の一致度を演算する一致度演算工程と、一致度に基づいて輪郭形状を定める輪郭形状決定工程と、を実施するものであり、標本抽出工程#1は、抽出した標本により形状モデルとして所定の形状が形成可能か否かを判定する概略形状判定工程#14を備え、所定の形状を形成不可と判定した場合には、改めて前記標本を抽出する。
(もっと読む)
移動体用の障害物検出装置
【課題】姿勢安定装置のような機構を不要とし、かつハフ変換に比較して処理負荷を軽減することができる移動体用の障害物検出装置を提供する。
【解決手段】距離画像センサ11は、移動体本体2に搭載され移動体本体2が走行しようとする面を含む空間領域を斜め下向きに撮像する。基準画像記憶部15には、移動体本体2が平面上を走行する際に距離画像センサ11で生成されることが予測される角度範囲内の平面の距離画像が所定の刻み幅で候補基準画像として格納される。差分画像生成部12は、基準画像記憶部15に格納された複数の候補基準画像のうち距離画像センサ11で生成された距離画像との差分画像を生成し、基準距離画像選択部13は、差分画像において一致領域の面積が最大になる候補基準画像を基準距離画像として選択する。判断部14は、この基準距離画像に対する差分画像の一致領域以外を障害物が存在する領域とする。
(もっと読む)
車線認識装置
【課題】 点列状のラインマーカも含む車線検出を可能とし、計算量が少なく高い検出性能を持つ車線認識装置を提供する。
【解決手段】 車線認識装置2が、視覚センサー1を介して取込まれる時系列入力画像から抽出される特徴画像に基づき、時間の経過とともに直線的軌跡を描く点列状の車線を抽出する。また、ある時刻における平滑特徴画像について、各画素値と前記抽出される特徴画像の対応画素の画素値を所定の割合で加算して更新し、時系列的に平滑化された平滑特徴画像を得る。更に、画像を路面平面座標に変換して処理することにより、入力画像もしくは入力画像に平滑化処理を施した画像にハフ変換等、計算量の大きな処理を加える場合に比べて計算量を少なくする。
(もっと読む)
自動化された非侵入的な虹彩認識システムおよびその方法
【課題】虹彩の高品質な画像を獲得し、虹彩の場所を探り当て、正確に照合する。
【解決手段】イメージ化器の視野に使用者の眼を自己目合わせできる虹彩獲得と、虹彩を唯一に定める使用者の目のディジタル化されたビデオ像の部分を定めるデータを配置して、空間的に登録されたそれぞれの虹彩の区別に役立つ空間的な特徴の各々をお互いに比較するために規格化された空間相関を採用することによって、使用者の眼の虹彩を定める空間的に配置されたデータを、虹彩モデルを定めるデータを用いて複数の空間のスケールの各々においてパターン照合し、その空間スケールでの照合の良さの評価を定量的に決定して、その後に、使用者の眼の虹彩を唯一に明示するパターンが、前記複数の空間のスケールの各々において定量的に決定された照合の良さの評価のある組み合わせのとおりに、モデルの虹彩と一致するか否かを判定する、ことによって達成される。
(もっと読む)
障害物検出装置、キャリブレーション装置、キャリブレーション方法およびキャリブレーションプログラム
【課題】変換パラメータの長期的変動に対応可能で、キャリブレーションを簡略化可能なキャリブレーション装置を提供すること。
【解決手段】画像を撮影する複数のカメラ101a、101bのうち一のカメラにおいて撮影された前記画像内の3次元空間上の任意の面上の点を、他のカメラから観察した画像内の前記面上の点に変換する変換パラメータを用いて、前記複数のカメラが撮影した画像から前記面上に存在する障害物を検出する障害物検出部121と、前記障害物までの距離を検出する距離検出部102が検出した前記障害物までの距離と、前記障害物検出部121が検出した前記障害物の前記画像上における位置座標とから、前記変換パラメータを補正する並進成分補正部123と変形成分補正部124とを備えた。
(もっと読む)
トロリー線検出装置
【課題】入力画像における背景と濃淡値の大きな箇所をトロリー線として誤検出することを防止する。
【解決手段】トロリー線20が映る面像をカメラ10により取得し、取得した画像へトロリー線検出演算子を積和してトロリー線のエッジを抽出し、抽出したエッジの座標をHough変換でHough空間へ投票し、投票されたHough空間の頂点を検出することでトロリー線を検出する画像処理を行うトロリー線検出装置40において、トロリー線検出演算子の積和の前に、トロリー線検出演算子の左右両端座標(h,j),(k,j)に対応する画像の濃淡値g(h,j),g(k,j)の差が一定値以上か否かを判定し、一定値以下の場合はトロリー線であるとして積和計算を行うが、一定値以上の場合はトロリー線以外であるとして積和計算しないので、トロリー線の誤検出を防ぐ利点がある。
(もっと読む)
映像記録装置及び映像記録方法
【課題】高解像度の映像情報を自動的に記録することができる映像記録装置及び映像記録方法を提供する。
【解決手段】入力された映像信号を受けて動きがある領域のみ抽出した後、抽出した動領域の中から人物の顔が写っている部分のみを抽出して人物の顔が最も良く写っているフレームを検出してベストショットトリガ信号を生成し、入力された映像信号を周波数領域映像信号に周波数変換した後、該周波数領域映像信号を複数のサブバンド映像信号に分割し、ベストショットトリガ信号が生成されたときには、そのときのフレームに対応する全てのサブバンド映像信号を選択し、ベストショットトリガ信号が生成されなかったときには、そのときのフレームに対応する低域側の一部のサブバンド映像信号のみを選択し、選択した各サブバンド映像信号を圧縮してサブバンド圧縮映像信号として、各サブバンド映像信号を多重して圧縮映像信号としてストレージ112に記録する。
(もっと読む)
画像処理装置及び画像処理における登録データ生成方法
【課題】 オペレータが異なっても、フィッティング精度が低下することなく、マッチング処理に用いられる登録データを常に適切に求めることができる画像処理装置を提供する。
【解決手段】 撮像部11によって撮影された画像データに基づいてエッジ点を抽出し、エッジ点からなる被写体の輪郭画像を生成する輪郭画像生成部21と、輪郭画像に基づいて、所定形状の線を輪郭画像上の被写体にフィッティングさせ、第1のフィッティング線を生成する第1フィッティング線生成部24aと、第1のフィッティング線に幅を持たせ、その線幅内を有効エッジ点領域とする有効エッジ点領域生成部24bと、輪郭画像上の有効エッジ点領域内にあるエッジ点に基づいて、所定形状の線からなる第2のフィッティング線を生成する第2フィッティング線生成部24dにより構成される。
(もっと読む)
人物追尾装置及び人物追尾プログラム
【課題】特徴量抽出領域の特徴量が背景と酷似している場合やズームを使用する場合でも安定して追尾を継続することができる人物追尾装置及び人物追尾プログラムを提供する。
【解決手段】ユーザによって指示された人物を追尾する場合に、指示された座標位置の周辺を探索領域としてその領域内の人物の頭部らしい領域を探索し、頭部を含む領域を特徴量抽出領域として決定すると共に、追尾中も常に探索範囲内にある人物の頭部らしい領域を探索し、頭部が充分な信頼性持って検出された場合には検出された頭部を含む領域を、また頭部が検出できなかった場合にはテンプレートに登録された特徴量と処理フレーム内の特徴量抽出領域との相関値を算出した結果から追尾対象の移動量を算出し、その結果によりパン・チルト・ズーム機能を有する撮像装置101を制御する。
(もっと読む)
道路認識装置及び道路認識方法
【目的】主に道路監視カメラシステムに有用な道路認識装置及び道路認識方法を提供する。
【構成】道路監視カメラシステム10の道路認識装置8は、道路領域A又は道路白線Lwを含む領域を撮像する撮像手段1と、撮像情報Dにおける画素の輝度値からエッジ情報Eを抽出するエッジ情報抽出手段2と、撮像画面Vにおける所定の対象範囲を指定して段階的に拡げつつ、この拡げられた対象範囲におけるエッジ情報Eに対して順次に直線のハフ変換を行って直線候補L1、・・を検出する直線候補検出手段3と、得られた直線候補を拡げられた対象範囲毎に分けて保持する保持手段4と、その中から所定の直線候補の交点Vpを検出して撮像画面Vにおける水平線Sの位置を検出する水平線検出手段5と、この水平線Sの位置以下の直線候補L1、L2、・・を保持手段4から選択し、これに基づき道路領域A又は道路白線Lwを認識する道路認識手段6と、を備える。
(もっと読む)
画像認識装置及び方法、ナビゲーション装置
【課題】 行路中に画像処理に関して、その処理上障害となる事象が比較的頻繁に発生することがある地点が含まれている場合に、合理的な処理負荷で画像処理を実行することができる画像認識装置を得る。
【解決手段】 走行路R上を走行する走行体1に装備可能に構成され、撮像手段により撮像された撮像画像i1から走行路Rに存する認識対象3を所定の認識ロジックに従って画像認識する画像認識手段を備えた画像認識装置を構成するに、画像認識を困難とする障害発生の可能性が高い地点である認識障害地点Oと前記認識障害地点以外の地点Nとで、画像認識手段における認識処理を異ならせる認識処理変更手段を備える。
(もっと読む)
画像処理方法及び画像処理装置
本発明は有効又は無効な画素で構成された1個の画像中で重なり合う第1の画像オブジェクトから第2の線状画像オブジェクトを除去する画像処理技術である。そして、第2の線状画像オブジェクトから線分抽出を行う線分抽出ステップ、第1の画像オブジェクトから、第2の線状画像オブジェクトを除去する除去ステップ、該第1の画像オブジェクト上の該線分近傍領域を走査し、該走査対象画素を順に抽出する画素抽出ステップ、該抽出された走査対象画素が有効画素か否かを判定する有効画素判断ステップ、該有効画素判断ステップにおいて有効画素と判定された走査対象画素から直近の線分に向けた垂線を導出し、該垂線上の全ての画素を有効画素にする画素補完ステップの各ステップを含んでいる。 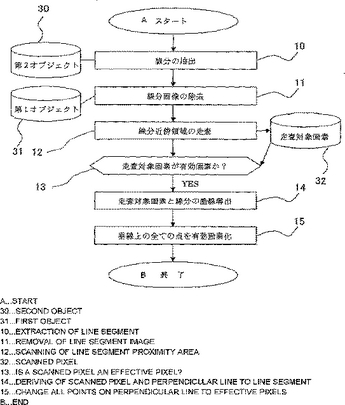 (もっと読む)
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】 1つのカメラより撮影された画像情報に基づいて、リアルタイムに視線を追跡する視線方向の推定装置を提供する。
【解決手段】 視線方向の推定装置は、対象画像領域内において、初期的に所定の汎用目尻テンプレートを用いて左右の目尻を検出して、左右の目尻の近傍の所定領域から追跡用目尻テンプレートデータを採集しておく。そして、対象画像領域内において、左右の虹彩を追跡する虹彩追跡手段(S202)と、追跡用目尻テンプレートデータを用いて、対象画像領域内において左右の目尻を追跡する目尻追跡手段(S206,S208)と、検出された左右虹彩の中心位置と検出された左右目尻の中心位置とに基づいて、視線を推定する視線推定手段(S210)とを備える。
(もっと読む)
撮影装置、画像処理装置、画像処理方法及びプログラム
【課題】撮影画像から原稿画像を確実に切り出す。
【解決手段】書画カメラ1に備えられた画像処理装置は、予め、台座13に原稿5が載置されていない状態で撮影を行って比較画像を取得する。そして、画像処理装置は、台座13に原稿5が載置された状態の縮小画像と比較画像とを比較して、その差分画像を取得する。これにより、台座画像は除去される。さらに、画像処理装置は、取得した差分画像から、その2値エッジ画像、2値画像を作成する。画像処理装置は、それぞれ、作成した2値エッジ画像に基づいて原稿画像の輪郭を形成する直線を検出し、直線の角度を取得する。画像処理装置は、2値画像に基づいて投影ヒストグラムを作成し、原稿画像の領域を特定する。そして、画像処理装置は、取得した直線の角度と領域とに基づいて原稿画像を切り出す。
(もっと読む)
161 - 180 / 188
[ Back to top ]