
Fターム[5B057DC13]の内容
Fターム[5B057DC13]に分類される特許
21 - 40 / 188
直線検知装置
【課題】解像度を劣化させることなく計算量を低減することができ、しかも、左右の対称性を維持することができる直線検知装置を提供する。
【解決手段】画像のXY平面から複数の候補点を抽出する候補点抽出部2と、XY平面に置かれた原点を基準に各候補点をハフ変換する候補点ハフ変換部3と、ハフ変換で得られた各正弦波に従いθρ平面としてメモリ上に確保された二次元配列の配列要素に投票する配列投票部4と、投票値が閾値を超える配列要素からXY平面上の直線を検知する直線検知部5と、検知された複数の直線から消失点を推定する消失点推定部6と、消失点に画像の原点を置き直す消失点原点化部7とを備える。
(もっと読む)
車両用白線認識装置

【課題】分岐路や路外のノイズ等が存在する場合にも自車走行路に対応する白線を精度良く認識することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、左右の各白線検出領域Al,Ar内で検出した白線候補点Pcの各点群に基づいて左右の仮白線近似線xtl,Xtrをそれぞれ演算してこれらの平行性を判定する。平行性が低いと判定したとき、予め設定した評価方法に基づいて左右何れか一方の仮白線近似線Xtを正しい仮白線近似線として判定するとともに、他方を誤認識した仮白線近似線として判定し、正しいと判定した仮白線近似線Xtを誤認識側にオフセットさせた仮白線近似線Xgに基づいて候補点抽出領域αe1を設定する。そして、設定した候補点抽出領域αe1外の白線候補点Pcを削除する。
(もっと読む)
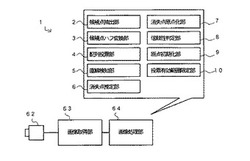
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
駐車支援装置
【課題】撮影画像に含まれる駐車枠を高精度に検出することができる技術を提供する。
【解決手段】算出手段による投票数の和が最も大きなθの組における複数の点(図4中の△、○で示される点)について、ρθ空間のρにより表される距離lが各仕切線SL間の距離と同一を示す点の組が駐車枠Pとして検出手段により検出されることで、上方視画像に含まれる所定以上の長さを有する直線を示すエッジのうち、駐車枠を形成する直線Lおよび仕切線SLとは異なる直線を示すエッジを形成する各画素について、前記θの組と異なるθ座標上の点(図4中の×で示される点)に投票が行われることにより検出される直線が、駐車枠であると誤って検出されることが防止されるので、撮影画像に含まれる駐車枠を高精度に検出することができる。
(もっと読む)
車線境界検出装置、車線境界検出プログラム
【課題】撮像画像から得られる車線境界線以外の路面標示の情報を利用して、車線境界の検出精度を向上させる。
【解決手段】車線境界検出装置10は、車線境界線と補助線とからなる複合線が検出された場合に、複合線を構成する車線境界線および補助線の全てを境界線候補とし、これら境界線候補から求めた候補位置パラメータ(車線中央側のエッジの位置を近似した直線を規定するパラメータ)のうち最も信頼性の高いものを基準線に設定する。基準線の横位置D3を算出し、補助線が基準線に設定された場合は、補助線と車線境界線との間隔(線間隔)D2だけ、基準線の横位置D3を車線境界線側にシフトさせる補正をした位置D2+D3を境界パラメータとして設定する。
(もっと読む)
注視エリア検出装置及び頭部装着型情報表示装置
【課題】処理負荷が軽く、検出までの処理速度が一定かつ高速な注視エリア検出装置、及び頭部装着型情報表示装置を提供する。
【解決手段】注視エリア検出装置は、眼球を撮像して第1の眼球像を生成する撮像素子(12)と、第1の眼球像に対して画像処理を行って第2の眼球像を生成する画像処理部(13)と、第2の眼球像から注視エリアを検出する注視エリア検出手段(14,15)とを備え、注視エリア検出部は、検出時間を一定とするように、第2の眼球像に対して確率統計を用いた確率統計処理を行って注視エリアを検出する。頭部装着型情報表示装置はこの注視エリア検出装置を備える。
(もっと読む)
車載カメラのカメラキャリブレーション装置
【課題】車載カメラの内部パラメータと外部パラメータの情報を、専用のカメラキャリブレーション用パターンなどを用いずに簡便に求める。
【解決手段】コントローラ10は、車載カメラ1から、白線を含む道路の入力画像を取得し、複数の異なるレンズ歪みパラメータに基づいて入力画像を補正して第1の補正画像をそれぞれ生成し、各第1の補正画像において、各白線に対応する直線を検出し、直線検出結果に基づいて、補正の妥当性を評価するための評価値を計算し、最良の評価値に対応するレンズ歪みパラメータを決定し、決定されたレンズ歪みパラメータに基づいて入力画像から補正された第2の補正画像を生成し、第2の補正画像において、各白線に対応する2本の直線を検出し、検出された2本の直線の交点を消失点位置として決定する。
(もっと読む)
ゴルフスイングの診断方法
【課題】スイングの良否が手軽に診断できる方法の提供。
【解決手段】ゴルフクラブをスイングしてゴルフボールを打撃するゴルファー及びこのゴルフクラブを、カメラ10が撮影する。撮影により、画像データが得られる。演算部16は、この画像データからフレームを抽出する。演算部16は、このフレームのエッジ画像を得る。演算部16は、このエッジ画像に対して所定の閾値に基づく二値化を施し、二値化画像を得る。演算部16は、この二値化画像にハフ処理を施してゴルフクラブのシャフトの位置を抽出し、ゴルフクラブの先端座標を特定する。演算部16は、異なるフレーム間の先端座標を対比することにより、アドレス時の仮フレームを決定する。演算部16は、仮フレームよりも所定数後のフレームから逆送りで各フレームの基準領域内の色情報を算出し、この色情報の変化に基づいてアドレス時のフレームを決定する。
(もっと読む)
区画線検出装置
【課題】高い精度で区画線を検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、動作モードを判断し(S14)、破線モード,フレーム加算モードのいずれかであれば(S14:YES)、フレーム加算処理を行う(S18、S20)。続いて、エッジ線の抽出を行う(S22)。ここでは、エッジ点をハフ変換して、一番多くエッジ点を通るエッジ線を抽出する。なお、このS22にて抽出されたエッジ線が区画線となる。次に、警報処理を行い(S24)、車両が車線から逸脱する危険ありと判定すれば、ブザーに対してブザー要求の制御信号を出力する。
(もっと読む)
撮影装置、並びに撮影装置の制御プログラム及び制御方法
【課題】対象物を表す複数の画像に基づいて精度良く対象物の立体画像を生成できる撮影装置、並びに撮影装置の制御プログラム及び制御方法を提供する。
【解決手段】撮影装置100は、対象物を撮影した第1画像と第2画像とを取得する画像取得部150と、対象物上の点が第1画像に表された第1特徴点と、対象物上の点が第2画像に表された第2特徴点とを複数取得する特徴点取得部161と、対象物が有する平面上の点を表す第1特徴点と第2特徴点とを特定する面上点特定部163と、面上点特定部163が特定した第1特徴点と第2特徴点とに基づいて、第1画像の撮影時と第2画像の撮影時とにおける撮影装置100の配置の変化を特定する配置変化特定部164と、配置変化特定部164が特定した配置の変化と、第1特徴点と第2特徴点とに基づいて、対象物の立体画像を生成する立体画像生成部170と、を備える。
(もっと読む)
画像処理装置及び電子機器
【課題】画像上に写り込んでいる不要オブジェクトを簡便に除去する。
【解決手段】人物312が不要オブジェクトである場合、タッチパネル機能を利用してユーザが人物312を指定することで、人物312の画像領域が不要領域に設定される。画像補正部は、不要領域を含む補正対象領域320を設定する一方で、補正対象領域320から不要領域を除外した部分の画像をテンプレートとして用いて、その画像の類似領域を入力画像310内から探索する。類似領域331が見つかると、画像補正部は、類似領域331を包含する画像領域を補正パッチ領域340として設定し、補正対象領域320の画像データと補正パッチ領域340の画像データを混合することで補正対象領域320内の画像を補正する。
(もっと読む)
障害物検出装置、及び障害物検出方法
【課題】道路遠方の障害物の検出ができ、障害物を検出する処理で必要とされる記憶領域の容量を抑えて処理負荷の軽減を図ることが可能な技術を提供する。
【解決手段】車両から撮影された画像から、該車両が走行する道路の領域としての画像領域を抽出し、抽出された画像領域における遠方領域を拡大して拡大画像を生成し、生成された拡大画像を記憶し、記憶された時間的に前後する拡大画像を比較するため、車両の速度に関する速度情報に基づいて車両の移動距離を算出し、時間的に前の拡大画像を該移動距離に応じた変換拡大画像に変換し、拡大画像と変換された変換拡大画像とを比較して両画像の異なる点を障害物として検出し、検出した検出結果を出力する。
(もっと読む)
区画線認識システム、区画線認識方法、及び区画線認識プログラム
【課題】路面上の区画線を高精度に認識すること。
【解決手段】区画線認識システムは、自車の車速を検出する車速検出手段と、自車のヨーレートを検出するヨーレート検出手段と、路面の原画像を入力する画像入力手段と、複数の異なる時刻における原画像に基づいて合成鳥瞰画像を生成し、合成鳥瞰画像に、合成鳥瞰画像を生成したときの車速とヨーレートとを関連付ける合成鳥瞰画像生成手段と、原画像および合成鳥瞰画像のうち少なくとも一方から、区画線候補を検出する区画線候補検出手段と、合成鳥瞰画像と関連付けられた車速およびヨーレートとに基づいて、車両の直進区間を抽出し、直線区間毎に区画線候補を認識し、認識した区画線候補が区画線として適しているか否かを検定する区画線候補検定手段と、を備えている。
(もっと読む)
検出装置およびその方法
【課題】頭部内のエッジを頭部の境界として誤検出することを防ぎ、頭部領域を精度よく検出する画像処理装置を提供する。
【解決手段】画像処理装置は、画像から人物の顔領域を検出する顔検出手段と、検出された人物の顔領域に基づいて頭部検出領域を設定する頭部検出領域設定手段と、設定された頭部検出領域のエッジを検出してエッジ画像を生成するエッジ検出手段と、顔領域の色に基づいて頭部検出領域の画像において、肌色領域を検出する肌色領域検出手段と、エッジ画像において、前記肌色領域を膨張させ、膨張した肌色領域に存在するエッジを削除するエッジ削除手段と、エッジ削除手段によりエッジが削除された画像から頭部領域に対応した候補楕円を検出する楕円検出手段とを備える。
(もっと読む)
画像処理装置及び方法、並びにプログラム
【課題】記念撮影等で構図の自由度を高めつつ簡便な操作で、人物全員が含まれた画像を得ること。
【解決手段】前景らしさ判定部63は、背景及び前景物体が含まれる第1フレーム原画像と、背景が含まれ、かつ第1フレーム原画像とは異なる位置に前景物体が含まれる第2フレーム原画像との各々に含まれる一定長以上の直線エッジを、背景の構造物のエッジとして、第1原フレーム画像及び第2原フレーム画像のうち、一方の領域に直線エッジが含まれ、他方の同一位置の領域に直線エッジが含まれない場合、他方の前記領域に前景物体が含まれる確率が、それ以外の場合よりも高いという前提事項の下、コスト関数のデータ項を設定する。前景切取線決定部65は、設定されたデー項を含むコスト関数が最小となるように、第1原フレーム画像及び第2原フレーム画像の切取線を決定する。
(もっと読む)
画像処理装置
【課題】画角内領域と画角外領域の境界線に対して垂直に交わらない線を含む実際の撮影画像に基づいて画角外領域を補間して仮想画像を作成する際に、違和感のない仮想画像を作成できる画像処理装置の提供。
【解決手段】画像処理装置1は、実際に撮影した撮像画像と撮像装置の仮想撮像位置に基づいて、当該位置で撮影した場合の仮想画像を作成する際に、該仮想画像に含まれる撮像画像の撮影時の画角内の画像を用いて、画角外となる領域の画像を作成する。画像処理装置1は、仮想画像に含まれる画角内の画像の端辺となる画角内の画像領域と画角外の画像領域の境界線上に端部が位置する直線に近似可能な点群を検出する点群検出部1aと、点群が検出された場合、当該点群の近傍の画像を用いて、境界線の外側へ該点群により近似される直線方向に延出する線画像を補間作成する画角外領域補間部1bと、を備える。
(もっと読む)
頭部認識方法
本願に記載されているのは、ソース画像における人の頭部を認識する方法である。この方法は、ソース画像における人体の少なくとも一部の輪郭を検出するステップと、ソース画像における人体の深度を計算するステップとを含む。ソース画像からは、その深度での人の頭部に対応する楕円の長半径の大きさ及び短半径の大きさを計算し、検出した輪郭の画素の組の少なくともいくつかについて、アキュムレータ・アレイにおいて、輪郭画素の位置に中心があり、長短の半径の長さを有する楕円の少なくとも一部分を生成する。アキュムレータ・アレイにおける強度極大点の位置が、ソース画像における人の頭部の候補の位置に対応するものとして選択される。  (もっと読む)
(もっと読む)
道路認識装置
【課題】車両前方の撮像画像中から車線や横断歩道をリアルタイムで検出可能であり、横断歩道までの距離や横断歩道の距離方向の幅を検出可能な道路認識装置を提供する。
【解決手段】道路認識装置1は、自車両前方を撮像する撮像手段2と、画像T上の水平ラインj上を探索して車線候補点cr、clを検出する車線検出手段10と、車線候補点crに対応する車線の横幅が横断歩道の横幅に相当する横幅であった場合には、当該水平ラインjの探索領域Slを拡大し、当該水平ラインj上で輝度の繰り返しパターンが存在するか否かを判断するパターン探索手段11と、繰り返しパターンが存在する各水平ラインjをグループ化するグループ化手段12とを備え、グループ化手段12は、グループ化したグループの最も手前側の位置までの距離Znearを横断歩道までの距離Zcとして算出し、グループの実空間上の距離方向の幅Wzを横断歩道の幅Wczとして算出する。
(もっと読む)
車線内車両検出装置及び車線内車両検出方法
【課題】高速道路の道路表面から所定の高さで設置されたステレオ画像撮像装置により、前方の高速道路を撮像したステレオ画像に基づき、ステレオ画像撮像装置に向かって進行して来る高速道路上の走行車線内の車両を検出して、ほぼリアルタイムで検出した車両の位置・速度を表示する車線内車両検出装置を提供する。
【解決手段】前方の自車線と隣接車線を撮像して基準画像と比較画像を出力するステレオ画像撮像装置と、基準画像と比較画像に基づき、視差画像を生成する視差画像生成部と、車線・車両検出処理部とを備え、車線・車両検出処理部は、基準画像と視差画像に基づき、ステレオ画像撮像装置に向かって進行して来る自車線及び隣接車線内の車両を検出して、検出した車両の位置を、走行車線を表す平面上の2次元位置として表示するとともに、検出した車両の速度と衝突までの時間をも表示する。
(もっと読む)
カメラベースのスキャニング
カメラベースのスキャニングの実施形態が説明される。様々な実施形態で、スキャンされた文書は、デバイスに関連付けられたカメラによって取り込まれた画像を使用して作成することができる。カメラによって取り込まれた画像は、紙、名刺、ホワイトボード、画面など、長方形オブジェクトに対応する、画像内の部分を識別するために処理される。これらの部分の1つまたは複数を、スコアリング方式に基づいて自動的におよび/またはユーザからの入力の助けで半自動的に、スキャニングするために選択することができる。1つまたは複数のスキャンされた文書は、選択された部分のゆがみを除去して遠近法の影響を取り除き(例えば、これらの部分を長方形に調整し)、さらに様々な画像エンハンスメントを適用して体裁を改善することによって、選択された部分から作成される。  (もっと読む)
(もっと読む)
21 - 40 / 188
[ Back to top ]