
Fターム[5B057DC39]の内容
Fターム[5B057DC39]の下位に属するFターム
学習機能 (505)
Fターム[5B057DC39]に分類される特許
201 - 220 / 261
地図更新装置
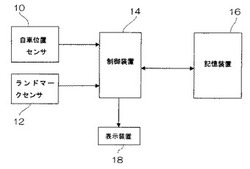
【課題】自車両周辺の立体物等の目印を用いて自車両位置を高精度に推定した結果から道路形状等の地図情報を更新する。
【解決手段】自車両の位置を検出する自車位置センサ10、自車両周辺の目印をランドマークとして検出するランドマークセンサ12と、道路形状及び複数のランドマークの位置を含む地図情報を記憶する記憶装置16と、複数のランドマークの位置情報と記憶装置に記憶された複数のランドマークの位置情報とがマッチングしているか否かを判断し、マッチングしていると判断された複数の目印の位置情報及び自車両の位置情報に基づいて、道路形状を演算し、演算された道路形状に基づいて、地図情報を更新する制御装置14とから構成されている
(もっと読む)
顔画像認証装置

【課題】様々な顔向き条件および照明条件の組合せで顔画像による個人認証を行った場合でも、登録者を拒否する可能性を低減させる。
【解決手段】撮影した顔画像から顔特徴量を演算し(S211)、この顔特徴量と既登録の顔特徴量との類似度を演算し(S212)、類似度が類似度最大値Pmaxより大きい場合は(S213)、類似度を類似度最大値Pmaxに設定する(S214)。類似度最大値Pmaxが第1閾値Th1以上である場合は(S215)、顔画像の顔向き条件の演算(S216)および照明条件の演算(S217)を実行し、顔向き条件および照明条件の組合せに対応して顔特徴量が未登録である場合(S218)、顔特徴量を顔向き条件および照明条件の組合せに対応させて追加登録する(S219)。類似度最大値Pmaxが第2閾値Th2未満である場合(S220)、登録者であるとは認証せず(S222)、類似度最大値Pmaxが第2閾値Th2以上である場合(S220)、登録者であると認証する(S221)。
(もっと読む)
補正画像データ生成方法,検査画像データ補正方法,補正画像データ生成プログラム,記録媒体,補正画像データ生成装置
【課題】 シェーディング補正を高精度に行うことができる補正画像データ生成方法を提供すること。
【解決手段】 欠陥の無い基準パネル111によって表示される一様な基準画像をCCDカメラによって撮像する際に、基準パネル111の固定枠2内における固定位置を順次変更する。そして、基準パネル111の各固定位置ごとに取得される基準画像データに基づいて、固定枠2内における基準パネル111の固定可能領域全体を覆う補正画像データを生成する。
(もっと読む)
判別器学習方法および対象判別装置ならびにプログラム
【課題】 画像内の判別対象の検出について誤検出率を低く保ちつつ高速化を図る。
【解決手段】 部分画像生成手段11によりサブウィンドウWが全体画像P上を複数画素間隔で走査し複数の部分画像PPが生成される。生成された部分画像PPは、候補判別器において顔(判別対象)であるか否かが判別され、顔である可能性のある候補画像CPが検出される。そして、対象検出手段20において、候補画像CPが顔であるか否かが判別される。ここで、候補判別器12は、基準サンプル画像と面内回転サンプル画像とを用いてにより学習されている。
(もっと読む)
顔認証装置および顔認証システムならびに顔認証方法
【課題】加齢による顔の変化等による認証率の低下を容易に防止でき、さらに他人による不正な顔認証や登録顔画像の更新をなされにくくし、セキュリティを向上させることができる。
【解決手段】顔認証装置1は、被写体が自身の顔の位置を確認するために用いられる誘導鏡13と、被写体を照明する照明部10と、被写体の顔画像を撮影する撮影部20と、撮影部20で撮影された顔画像を用いて認証処理等のデータ処理を行うデータ処理部40と、外部と電子データのやり取りを行うデータ送受信部50とを備え、撮影された顔画像を端末装置に送信し、端末装置から送信されてくる登録顔画像の更新に関する指示を受け付けて登録顔画像の更新を行う。
(もっと読む)
画像管理装置、ならびに画像管理用コンピュータプログラムおよびそれを記録した記録媒体
【課題】個々の画像データに対する情報付加の手間を軽減でき、かつ、正確な検索が可能な画像管理装置を提供する。
【解決手段】人物画像を含む複数枚の画像データは、写真データベース20に格納される。人物画像検出部31は、各画像データ中の人物画像(たとえば顔画像)領域を抽出する。この抽出された領域の画像に対して人物画像認識処理部32による画像認識が行われ、認識結果は、写真データベース20に格納される。使用者による認識結果の修正入力は、修正入力受付部34によって受け付けられる。これを受けて、認識結果修正処理部35は、写真データベース20に格納されている認識結果を修正する。画像データの検索は、検索条件入力受付部38を介して受け付けられた検索条件に従い、画像検索処理部39によって実行される。
(もっと読む)
XYθステージによる位置アライメントシステム
【課題】従来、人間によって指定又は調整を行なわなければならず問題であった基準マークの登録、XYθステージと同上システムとの間の座標軸の自由度調整、カメラの配置位置がXYθステージの表裏どちら側かの判定・調整および基準マークのカメラ視野内への捕捉を完全に自動化したXYθステージ位置アライメントシステムを提供する。
【解決手段】カメラの視野から幾何学的に特徴的なパターンを特別な画像処理アルゴリズムにより基準マークとして抽出・登録する手段、XYθステージの所定の動作に対するカメラの撮像画像上での動きの計測によるXYθステージと位置アライメントシステムの座標軸の自由度自動調整手段、カメラのXYθステージに対する配置位置の自動判定・自由度自動調整手段、更には所定の視野移動方法による基準マークを含む探索パターンのカメラ視野内への自動捕捉手段の内の任意の組合せを適宜具備させる。
(もっと読む)
地図情報生成装置
【課題】 交差点や横断歩道などの正確な道路地図情報を容易に生成する。
【解決手段】 路面を撮像した撮像画像から道路記号を検出し、一旦停止の道路記号を検出したときに報知する。また、路面を撮像した撮像画像から道路記号を検出するとともに、車両の現在位置を検出し、一旦停止の道路記号を検出した場合に、検出した道路記号が示す道路地図情報を車両の位置情報とともに道路地図記憶装置に記憶する。
(もっと読む)
画像処理用部品データ作成方法及び画像処理用部品データ作成装置
【課題】 部品の種類に応じた適切な部品データを自動的に作成できるようにする。
【解決手段】 画像処理用部品データの作成対象となる部品の画像データを取り込み、この部品の画像データから当該部品の特徴を表す部分のデータ(以下「特徴データ」という)を抽出する。この特徴データには、水平方向と垂直方向のピクセル頻度とゼロクロスパターン頻度のデータが含まれる。この後、抽出した特徴データをリファレンス用部品データのデータベースの特徴データと比較して両者が最も一致する部品の種類を自動判別する。判別した部品の種類に応じて当該部品の画像データから当該部品の画像処理用部品データ(ボディ、リード、バンプ等の位置やサイズ等のデータ)を抽出する。この後、抽出した部品の画像処理用部品データを画像処理用部品データのデータベースに当該部品の種類と関連付けて保存する。
(もっと読む)
位置記録装置及び位置記録方法
【課題】認識対象物の検出誤差を考慮して記録処理を行うことにより、認識対象物の正確な位置記録が行える位置記録装置及び位置記録方法を提供すること。
【解決手段】カメラ2で撮像された画像情報に基づいて標識の画像認識を行い(S12)、画像認識された標識の位置を検出し(S20)、検出された標識の位置情報の誤差を演算し(S22)、標識の位置情報及びその位置検出誤差情報を記録し(S24)、地図情報の標識位置と今回検出された標識の位置情報の計測誤差を比較し(S34)、その誤差の小さい方の位置情報を地図データとして記録する(S36)。
(もっと読む)
属性識別システムおよび属性識別方法
【課題】画像に含まれる対象の属性を正確に識別することができる属性識別システムを提供する。
【解決手段】このシステムは、顔画像に基づいて人物の属性(年齢、性別など)を識別する。属性識別辞書は、オフライントレーニングシステムを構成するコンピュータ33によって生成される。このコンピュータ33は、属性が既知の人物の顔画像をそれぞれ含む複数枚のサンプル画像データと個々の人物の属性とを対応付けた学習サンプルデータを用いて学習を行う。これにより、顔画像の人物の属性を識別するための属性識別辞書が生成される。オンライン動作システムを形成するコンピュータ3は、コンピュータ33によって作成された属性識別辞書に基づいて、未知の人物の顔画像に基づき、当該人物の属性を判定する。
(もっと読む)
画像処理方法および装置
【課題】
形状特徴を用いて条件変化に安定な背景差分やパターン認識を行うために、注目画素から安定な画素を選択して、注目画素の周辺のパターン形状を表す特徴ベクトルを算出する画像処理方法および装置を提供することにある。
【解決手段】
カメラからの信号入力部,入力信号から基準画像を作成または更新し、入力画像との比較を行いオブジェクトの検出行う画像処理部,検出結果を利用する出力部および特徴ベクトルを算出する特徴ベクトル部を備え、条件変化に対して安定な画素を選択して注目画素との対を構成し、注目画素と特徴画素との距離と方向を表すベクトルを算出する機能を備え、そのベクトルの長さの大小関係を符号化した特徴ベクトルの比較を行うことにより高速で安定したパターン検出や画素の類似度判定を行うことができる。
(もっと読む)
歩留予測装置、不良率予測装置、外観検査装置、歩留予測方法、及び不良率予測方法
【課題】 試料の表面を撮像して得られた撮像画像から試料の欠陥を検出する外観検査の際に、検査対象である試料の歩留を予測することが可能な歩留予測装置及び歩留予測方法を提供する。
【解決手段】 歩留予測装置を、外観検査に使用される撮像画像から得られる試料3に関する複数種の特徴量を、算出及び/又は取得する特徴量算出/取得手段21と、各特徴量毎に特徴量に応じて予想歩留をそれぞれ算出する予想歩留算出手段22と、試料3の歩留に対して各特徴量毎に予め定めた相関関係に基づいて重み付けを決定し、各予想歩留の重み付けを行って試料3の歩留を求める総合歩留算出手段23と、を備えて構成する。
(もっと読む)
画像作成方法、画像作成装置及びパターン検査装置
【目的】 物理モデルに関わりなく、精度の高い参照画像を作成する方法及び装置を提供することを目的とする。
【構成】 良品レチクルパターンの光学画像から、パターンを構成する複数の要素部分に対応する良品レチクルパターンの複数の要素スキャン画像を記憶してデータベースを作成するデータベース作成工程(S106)と、検査対象レチクルパターンの設計データ画像を構成する複数の要素部分に対応する検査対象レチクルパターンの複数の要素設計データ画像に対応する良品レチクルパターンの複数の要素スキャン画像を組み合わせて、検査対象レチクルパターンの設計データ画像に対応する検査対象レチクルパターンの参照画像を作成する検査対象レチクルパターン参照画像作成工程(S112)と、を備えたことを特徴とする。
(もっと読む)
回路基板の外観検査方法
【課題】回路基板上の同一位置に色彩や形状が異なる電子部品を混用する場合であっても、正しい判定結果を導出することができる概観検査方法を提供する。
【解決手段】撮像して得られる電子部品の画像データに基づき、該電子部品データを登録する際に、すでに形態の異なる同一部品のライブラリーデータが存在する場合、当該回路基板に搭載される検査対象の電子部品の特徴データを作成し、その作成した電子部品の特徴データをもライブラリデータとして登録し、該回路基板の検査実行時に、電子部品に対するライブラリデータが複数存在するとき、撮像される回路基板の画像データから検査対象の電子部品の特徴データを作成し、該作成した特徴データと予めライブラリに登録されているライブラリデータ中の特徴データとを比較し、当該比較結果に基づいて前記特徴データと最もマッチングする電子部品のライブラリデータを特定して所定の検査を行う。
(もっと読む)
不変視点からの画像照合および2次元画像からの3次元モデルの生成
複数の特徴を含む3次元ソースオブジェクトにおける特徴に対して、特徴付けを行い、かつ、基準オブジェクト間で不変視点検索を実行することにより、そのようなオブジェクトの基準データベースの中から最もマッチングする3次元オブジェクトを探索する方法およびシステムを提供する。本発明はさらに、基準オブジェクトを変形することによりソースオブジェクトの3次元表現を作成することを含む。  (もっと読む)
(もっと読む)
画像処理装置及び画像処理方法
【課題】 特徴点を抽出するために用いる参照画像を簡単に生成することができる画像処理装置及び画像処理方法を提供することを課題とする。
【解決手段】 撮像画像から対象物体の特徴点を抽出する画像処理装置1であって、三次元形状が特定可能な対象物体の各特徴点について、基準状態のときの対象物体の基準画像に対する生成が必要とされる画像の二次元上の投影位置及び画素特徴の割合を示すテーブルと、基準状態のときの対象物体を撮像した撮像画像をテーブルに基づいて生成が必要とされる画像に変換する変換手段13とを備え、変換手段13で変換した画像を参照画像として特徴点を抽出することを特徴とする。
(もっと読む)
画像送受信システム、画像送受信方法、並びに画像送信手順と画像受信表示手順を実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】送受信するデータ容量を削減しつつ、材質等の再現が可能な高品質の画像データの送受信を可能にする。
【解決手段】画像送信装置10は、画像データを図形データに変換する画像変換プログラム1、部品画像を蓄積するハードディスク2、蓄積された部品画像に基づいて図形データに対して表示属性を設定する属性設定プログラム3、図形データと当該図形データに設定された表示属性とを送信するデータ送受信デバイス4を備えると共に、画像受信表示装置11は、図形データと当該図形データに設定された表示属性を受信するデータ受信デバイス5、部品画像を蓄積するハードディスク6、図形データと当該図形データに設定された表示属性に基づき蓄積された部品画像を加工して画像データを復元する画像復元プログラム7、復元された画像データを表示する画像表示プログラム8を備えた。
(もっと読む)
対象物の認識方法及び装置
【課題】対象物のサイズが極めて小さい場合でも、確実にその対象物を認識することが可能な対象物の認識方法及び装置を提供する。
【解決手段】撮像装置4で撮像された電子部品2の画像が、アフィン変換処理部36aでアフィン変換されて拡大される。この拡大された画像は、エッジ強調処理部36bにおいて画像のエッジのコントラストが強調される。続いて、加重平均演算処理部36cで、アフィン変換後の画像とエッジ強調後の画像が加重平均され、その加重平均された画像が輝度調整処理部36dでガンマ補正されて、明るさが調整され、その画像に対して認識が行われる。このような構成では、アフィン変換、エッジ強調、加重平均、輝度調整の各処理を施された拡大画像により、部品認識を行っているので、小型部品であっても、高精度な部品認識が可能となる。
(もっと読む)
検出装置、検出方法及び検出プログラム
【課題】画像中に存在する複数の大きさの被写体を、高速に検出可能とする技術を提供する。
【解決手段】検出処理にあたり、複数の大きさの物体を検出するために用いるピラミッド画像と高速検出に用いるピラミッド画像とを一部共通化したピラミッド画像MP(MP1)を作成する。具体的には、検出処理に一度利用した画像を、別の大きさの顔を検出処理する際にも再度利用できるようなピラミッド画像の構成とし、さらに、縮小率β=1/K(Kは2以上の整数)を有効に利用した方法で当該ピラミッド画像を作成する。これにより、検出処理に用いるピラミッド画像の作成総数を減らし、かつ、縮小画像作成に要する処理時間を短縮することが可能となる。
(もっと読む)
201 - 220 / 261
[ Back to top ]