
Fターム[5C054AA01]の内容
閉回路テレビジョンシステム (47,623) | 閉回路TVシステム (1,968) | 一方向性閉回路TVシステム (680)
Fターム[5C054AA01]に分類される特許
1 - 20 / 680
画像処理装置及び画像処理方法
画像間差分装置および画像間差分方法
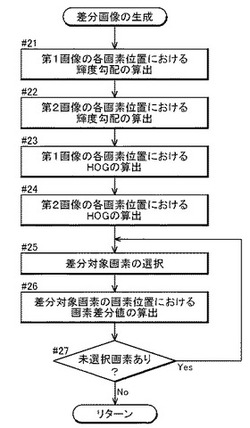
【課題】外乱の影響を受け難いロバストな画像間差分技術を提供する。
【解決手段】勾配方向算出部14aは、画像を構成する各々の画素の画素位置における画素値の勾配方向を求める。ヒストグラム生成部14bは、各々の画素を対象画素として設定するとともに、対象画素の周囲にヒストグラム算出領域を設定し、ヒストグラム算出領域に含まれる画素の画素位置における勾配方向の度数分布を対象画素の画素位置におけるヒストグラムとして生成する。画素差分部14cは、第1の画像の差分対象画素の画素位置におけるヒストグラムと、第2の画像の比較対象画素の画素位置におけるヒストグラムと、の差分値を差分対象画素と比較対象画素との画素差分値として算出する。画像差分部14は、差分対象画素の画素位置における画素値を画素差分値に基づいて設定することにより差分画像を生成する。
(もっと読む)
監視システムおよび撮像装置

【課題】プライバシ保護範囲のマスク処理を実行するにあたって、撮像装置の処理負荷を低減するとともにコストの低減を図る。
【解決手段】撮像装置10は、信号生成部13において、映像信号a1に、パンチルト角度情報を示す信号a4およびf値情報を示す信号a5を重畳させて、重畳信号a2を記録装置20に出力する。記録装置20は、コントローラ30から、マスク設定位置の情報(a8)や操作信号(a12)を含む信号a6を受信するとともに、受信した重畳信号a2から映像信号a7、f値およびパンチルト角度を分離して、f値およびパンチルト角度を用いてマスク画像を生成し、映像信号a7に上書きすることにより、マスク処理済画像を示す信号a11を生成する。
(もっと読む)
車両周辺撮影装置および車両周辺画像の処理方法
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
車両周辺監視用画像生成装置
【課題】魚眼レンズのような広角レンズを用いた撮影画像であっても、車両周辺監視に適したモニタ表示画像を作成することができる画像生成装置の提供。
【解決手段】広角レンズを装着した車載カメラ1によって取得された車両周辺の撮影画像を入力する画像入力部51と、撮影画像の横方向に延びる歪み補正基線によって上下方向で区分けされた撮影画像領域に対して個別に、広角レンズの縦方向のレンズ歪みを補正する画素単位の歪み補正量の強度を設定する補正強度設定部55と、補正強度設定部55によって設定された歪み補正強度に基づいて撮影画像に対する歪み補正を実行する歪み補正実行部54と、歪み補正実行部54によって補正された撮影画像からモニタ表示画像を出力するモニタ表示画像出力部58とが備えられている。
(もっと読む)
車両室外撮像装置
【課題】記憶容量の増加を抑制可能な車両室外撮像装置等を提供する。
【解決手段】車両室外撮像装置は、車両の室の内部の人の所定の状況変化を検知する検知用マイク10、検知用カメラ20等の検知部と、車両の室の外部を連続的に撮像して一連の外部画像を生成する外部撮像部40と、人の所定の状況変化が検知部によって検知される場合、一連の外部画像のうちの一部を記憶する記憶部60と、を備える。車両室外撮像装置は、車両の室の内部を連続的に撮像して一連の内部画像を生成する内部撮像部70を備えることができる。この場合、記憶部60は、一連の内部画像のうちの一部も記憶することができる。
(もっと読む)
リアビューカメラ用目安線登録重畳装置
【課題】リアビューカメラで表示する車両後方の画像に重畳する目安線の登録を簡便に行
う。
【解決手段】車両停止位置設定部150によって、床面や路面に表示された目安線と所定
の相対関係をなす位置に車両10を停止させ、撮像部20で撮影した目安線を含む画像の
中から目安線抽出部40で目安線を示す領域を抽出し、抽出した領域の形状と階調値を目
安線補正部50で補正して、目安線記憶部60に登録する。
(もっと読む)
カメラ装置及びその制御方法
【課題】特定の被写体を検出してその方向に撮影方向を変更するまでの設定を短時間に行うことができるようにする。
【解決手段】初期化処理としてパン方向及びチルト方向の原点位置を検出している間に対象物を検出した場合、その検出位置の情報をRAM113に記憶する。そして、ローテーション方向の原点を検出し、初期化が終了した後に、その対象物が映る方向へ撮影方向を変更するようにして、撮影方向の設定を短時間に行うことができ、カメラの設置及び設定作業の時間を短縮することができるようにする。
(もっと読む)
遠隔タイムシフト監視システム
【課題】現場における作業の作業シークエンスにおいて、監視項目となる部分をチェックポイントとしてマーキングを行い、マーキングにより作成したマーク情報を参照してチェックポイントの画像を抽出し、監視モニターに表示した一画面に抽出した複数画像を表示するマルチビューを実現することが一つの課題である。
また、作業員への監視結果の通知および監視結果に基づく指示を通知することにより、作業員に現在進行中の作業の状態や評価、あるいは適切な作業をするための指示をフィードバックして現場の作業を安全かつ効率的なものとする監視システムを提供することも課題となる。
【解決手段】作業現場A1001、作業現場B1002、ネットワーク1003、以下に説明する各種機能を制御するサーバとして構成される画像管理手段1004、監視所1005という構成である。
(もっと読む)
作業車両の周辺監視装置
【課題】不要な警告を抑制可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
(もっと読む)
作業車両の周辺監視装置
【課題】俯瞰画像において作業車両の近くに位置する物体を容易に認識することができる作業車両の周辺監視装置を提供する。
【解決手段】作業車両の周辺監視装置において、第1撮像部は、作業車両の周囲の第1領域を撮像して第1画像データを得る。俯瞰画像作成部は、第1画像データを所定の仮想投影面31に投影することにより、作業車両の周囲の俯瞰画像を作成する。仮想投影面31は、作業車両に近づくほど地面からの高さが高くなる形状を含む。
(もっと読む)
接近物検知装置および接近物検知方法
【課題】接近物であるか否かの判定を迅速に行うことができ、静止物が接近物であるとの誤判定を低減して、接近物警報システムに適用する際の静止物を対象とした誤警報の出力を低減することができる「接近物検知装置および接近物検知方法」を提供すること。
【解決手段】接近物候補検出手段4によって立体物の最新の検出結果が取得される毎に、最新の検出結果に示される立体物の重心を算出する重心算出手段5と、前記重心の算出結果に基づいて、前記重心の移動方向を算出する移動方向算出手段6とを備え、接近物判定手段7は、前記重心の移動方向が、移動体への接近を示す方向である場合には、接近物であると判定し、前記重心の移動方向が、移動体からの離間を示す方向である場合には、接近物でないと判定すること。
(もっと読む)
作業車両の周辺監視装置
【課題】車体と車体周辺の物体との位置関係をカメラ画像上で容易に判断可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、カメラ画像と、カメラ画像上の地面に垂直投影される車体(ベッセル4を含む)の外縁を示す車体外縁線BLと、をモニタ30に表示させる表示制御部40を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
画像送信装置、画像送信方法、及びプログラム
【課題】 本発明は、撮像方向を変更可能なネットワークカメラにおいて、カメラが撮像方向を特定するための基準方向の探索中も被写体のプライバシーを保護することを目的とする。
【解決手段】 本発明は、変更部が撮像方向の変更を開始してから撮像方向が基準方向に達したことを検出部が検出するまでに撮像された撮像画像を、表示制約領域の表示が制約されない撮像画像を閲覧する権限を有する第1のクライアントには表示させ、権限を有さない第2のクライアントには表示を制限させる制御部を有する。
(もっと読む)
電子内視鏡システム並びに画像処理方法及びソフトウェア
【課題】正常部と異常部とを正確かつ明確に分別することが可能な電子内視鏡システムを得る。
【解決手段】本発明による動的閾値決定処理について説明する。この処理では、正常部と異常部とを暫定的に分けるために用いる初期閾値が予め定められている。動的閾値決定処理は、初期閾値によって分けられた2つの集団のうち1つの集団の重心を求め、初期閾値から重心までの間において正常部と病変部とを最も良く分ける動的閾値を探索する処理である。初期閾値から重心まで所定の移動ステップで仮の閾値を移動させ、その仮閾値の近傍に位置する画素の数が最も少ないときに、その仮閾値を動的閾値として決定する。
(もっと読む)
監視映像再生方法および装置
【課題】監視カメラ11等により長時間記録された監視映像を再生しながら、所望の映像を探す作業に要する時間を短縮できる監視映像再生装置を提供する。
【解決手段】分割画面の各画面に1台または複数の監視カメラの記録映像を再生するに当たり、一定時間ごとに別な時間帯の映像を複数の分割画面1−4に同時に再生し、各画面の中で、例えば画面2に割り当てられた時間帯の再生が終了した場合、画面移動(1),(2)により、画面を時系列に詰めて再構成し、詰めたことによって空いた最後の画面4で、(3)のように、新たな時間帯の再生を開始する。これにより、監視映像のように、飛び飛びに記録された場合でも、所望映像を探し出す作業に要する時間を短縮する。
(もっと読む)
画像処理装置
【課題】回路規模が低減された簡易な構成として、物体の動きを映像によって確認可能とするための画像処理装置を提供すること。
【解決手段】実施形態によれば、画像処理装置であるDSP4は、積算部12及び動き判別部13を有する。積算部12は、映像信号から得られる画素ごとの情報である輝度信号21を積算する。動き判別部13は、撮影された映像の時系列的な変化を積算部12による積算結果から検知する。動き判別部13は、映像での物体の動きを判別する。積算部12は、単位領域内について、第1のフレームの情報を積算してから、第1のフレームについての積算の際とは信号レベルの符号を反転させて、第2のフレームの情報をさらに積算する。動き判別部13は、積算部12における第1のフレーム及び第2のフレームについての当該積算結果に応じて、単位領域内の動き判別を実施する。
(もっと読む)
画像記録装置
【課題】画像記録装置内の画像を記録する記録媒体には、HDD(Hard Disk Drive)またはSSD(Solid State Drive)のいずれか一方のみが用いられており、それぞれの特徴に応じていずれかが選択されるのみであり、どうしてもそれぞれ苦手な場面が存在した。
【解決手段】本発明によると、記録媒体にHDDとSSDを併用し、それぞれの特徴を生かして、通常記録時にはHDDに、アラーム記録時にはSSDに記録することで、より安全性が高く効率的な画像記録を実現することができる。
(もっと読む)
車載情報システム、及びその制御方法
【課題】異常事態発生時において、異常事態の記録情報を複製し、複製された記録情報を車外へ容易に持ち出し可能な車載情報システムを提供する。
【解決手段】本発明に係る車載情報システム1F00は、システム制御部1000と、データバッファ部1200と、車両の操縦情報、車両の運動状態、及び車両の位置情報の少なくとも1つと、車両の前方及び後方の少なくとも一方の映像を含む映像情報とを含む運転情報を取得し、データバッファ部1200に記録する運転情報取得部1350と、映像情報を所定のビットレートでエンコードするビデオエンコード部1300と、映像及び音声のうち少なくとも一方を含むAV情報を再生するAV処理部1100とを備え、システム制御部は、ビデオエンコード部によってエンコードされ、データバッファ部に記録された運転情報の少なくとも一部をAV処理部にメディアへ記録させる。
(もっと読む)
1 - 20 / 680
[ Back to top ]