
Fターム[5C054FC11]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623)
Fターム[5C054FC11]の下位に属するFターム
関心領域の抽出;特定 (2,029)
動き抽出 (836)
輪郭抽出 (304)
計測処理 (704)
統計処理 (158)
Fターム[5C054FC11]に分類される特許
21 - 40 / 592
頭部装着型撮像システム、頭部装着撮像装置、画像表示方法
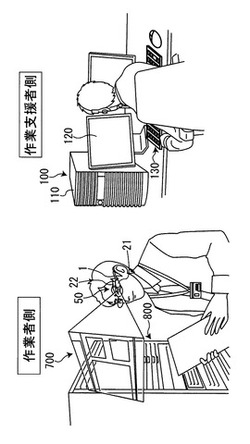
【課題】頭部に頭部装着型撮像装置を装着した作業者の視界方向に関わらず、作業支援者が作業対象物を視認することができる頭部装着型撮像システムを提供する。
【解決手段】作業者の視界方向を連続的に撮像して撮像データを生成する撮像部22を有する頭部装着撮像装置50と、前記撮像データを表示する遠隔側表示部120を有する遠隔側装置100を備え、作業者の作業状態を検出する作業状態検出部と、前記作業状態検出部が検出した作業者の作業状態に基づき、作業対象物が作業者の視界に入っているか否かを判断する作業対象物検出判断手段を更に有し、作業対象物が作業者の視界に入っていないと判断された場合には、前記撮像データに基づいて、作業対象物が含まれる静止画像が遠隔側表示部120に表示される。
(もっと読む)
移動物体追跡装置

【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、監視空間内の障害物の領域に設定された予測位置を画一的に排除すると物体位置の判定精度が劣化する。
【解決手段】ペナルティ設定部50は、障害領域に対応して障害物の高さに応じたペナルティ値を設定する。物体位置判定部53は、各予測位置に対応して画像から抽出される移動物体の特徴量に応じた評価値を算出し、当該評価値に基づいて物体位置を判定する。当該判定に際して、物体位置判定部53は各予測位置の評価値を当該位置でのペナルティ値に応じて低める補正を行う。
(もっと読む)
周辺監視装置
【課題】周辺監視装置の最終出力画像において、被写体が歪むことを抑制すること。
【解決手段】周辺監視装置では、一台のカメラで撮像した撮像画像を取得し(S120)、鳥瞰画像へと変換して記憶する(S150)。さらに、時間軸に沿った複数の鳥瞰画像を合成して一枚の鳥瞰画像(即ち、合成画像)を生成する(S160)。その後、障害部検出センサにて検出した同一障害物の外郭における地点の時間軸に沿った履歴から障害物の輪郭を推定し(S210)、その輪郭を境界とし、合成画像において、障害物が占有する領域よりも大きな領域である対象領域を特定する(S220)。そして、その特定した合成画像の対象領域について、該対象領域を構成する各撮影画像を撮影した時点に存在したカメラ10の中心位置に向かう方向に沿って圧縮することで、最終出力画像を生成する(S230)。
(もっと読む)
画像生成装置、画像表示システム及び画像表示方法
【課題】重複領域に含まれる物体の像を強調する技術を提供することを目的とする技術に関する。
【解決手段】
複数の撮影画像を合成して、仮想視点から見た車両の周辺の様子を示す合成画像を生成し、かつ、複数の車載カメラのうちの2つの車載カメラの撮影範囲が重なる領域に対応する合成画像の重複領域を生成する際に当該2つの車載カメラの2つの撮影画像を混合して、重複領域に含まれる物体の像を強調する。これにより、重複領域の画像の像をユーザが容易に認識できる。
(もっと読む)
内視鏡装置
【課題】接続された外部機器を容易に確認できる内視鏡装置を得る。
【解決手段】第1の文字列描画回路312は、観察画像に図形を重畳して重畳画像を作成する。また、図形を抽象化又は暗号化して観察画像に重畳したり、観察画像又は重畳画像を圧縮して圧縮画像を作成したりすることも可能である。図形は、文字等の様々な形状を含む。図形の抽象化は、もとの図形の意味内容を第三者が認識できないような形状に図形を変形することにより行われる。図形が被験者の名称を表す文字である場合、名称をイニシャルに変換して変形する。図形の暗号化は、もとの図形の意味内容を第三者が認識できないような形状に図形を変形することにより行われる。例えば、図形が処理の程度を表す文字である場合、バーコードや二次元コード等の暗号コードに文字を変換する。あるいは、共通鍵を用いて文字を暗号化して暗号文字に変換する。
(もっと読む)
車両用表示装置
【課題】利用者が車両周囲の状況が把握しやすい画像を表示することができる。
【解決手段】車両に搭載されたカメラ1a〜1fが撮像した撮像画像のデータを取得し、表示する映像の仮想視点Pを設定し、撮像画像を投影するために予め定義された曲面Qを有する基準曲面座標系131の少なくとも一部を、基準曲面座標系131に対する仮想視点Pの位置に応じて変形して変形座標系133を得て、撮像画像のデータを変形された変形座標系133に投影し、設定された仮想視点から車両及びこの車両の周囲を見た映像を生成し、生成された映像をディスプレイ3に表示させる制御装置10を備える画像表示装置100を提供する。
(もっと読む)
ネットワークカメラシステムおよびこれに利用する映像情報時刻同期方法
【課題】ネットワーク伝送に影響を与えることなく、ネットワークに接続された複数のカメラ装置で撮影された映像情報間において時刻同期をとることが可能なネットワークカメラシステムおよびこれに利用する映像情報時刻同期方法を提供する。
【解決手段】実施形態によれば、ネットワークカメラシステムは、照明装置と、ネットワークで相互に接続された複数のカメラ装置とを備える。照明装置は、基準時刻情報を取得して照明光通信を行うためにコード化し、照明光により一定期間ごとに監視対象エリアに送信する。複数のカメラ装置はそれぞれ、照明装置から発光された照明光が被写体で反射された反射光を取り込むことにより監視対象エリアの撮影を行い、撮影により得られた映像情報を解析して基準時刻情報を抽出し、撮影により得られた映像情報の抽出された基準時刻情報に対応する位置に、当該基準時刻情報を紐付けして録画させる。
(もっと読む)
作業機械の周囲監視装置
【課題】作業機械に設置したカメラからのカメラ画像に基づいて、上方視点とした俯瞰画像に変換してモニタに表示する際に、車両の振動に基づく画像の画質低下を最小限に抑制できるようにする。
【解決手段】上部旋回体3には、後方カメラ13Bと、左右の側方カメラ13L,13Rとが設けられ、カメラ13B,13L,13Rのカメラ画像を視点変換して個別俯瞰画像を生成して、表示キャラクタ21を中心とした合成俯瞰画像がモニタ20に表示され、油圧ショベルPSには角速度検出器45が設けられて、ピッチ角とその方向及びロール角とその方向が検出され、走行路に凹凸があり、また傾斜地である場合には、仮想視点算出部36で変化した仮想視点VFの位置及び方向に基づく合成俯瞰画像が画像変換部32で生成されて、モニタ20に表示される。
(もっと読む)
検知装置、及び、検知方法
【課題】カメラが撮影した車外画像のみに基づいてカメラの位置ズレを簡易に検知できる技術を提供する。
【解決手段】カメラが撮影した時間的に連続する複数の車外画像の夫々に含まれる他の車両の像に基づいて、他の車両の停車を判断するため、検知装置はその停止を車外画像のみで簡易に判断することができる。更に、他の車両の停車を判断した場合に、導出した車外画像中の他の車両の像の停止位置と基準停止位置とを比較した結果に基づいてカメラの光軸の位置ズレを検知するため、検知装置は車外画像のみに基づいてその位置ズレを簡易に検知することができる。
(もっと読む)
情報処理装置、情報処理装置の制御方法、プログラム、及びプログラムを記録した記録媒体
【課題】 画像検査を行う一連の処理を実行し、画像検査と画像検査後の結果画像を表示する処理を同時に複数おこなった場合、情報処理装置の処理能力が足りず、画像検査の結果画像を間引いて負荷の軽減をするが、作業者に必要な結果画像までも間引かれてしまう。
【解決手段】 検査結果の画像を間引き処理が発生した場合に、当該間引き処理の行われた結果画像の検査結果1203がNGか否かを判定し、NGであった場合には間引かずに当該NG画像を表示し、NGでなかった場合には結果画像を間引く。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、移動物体の現時刻での予測位置が監視空間内の障害物の領域に設定されると追跡精度が劣化する。
【解決手段】予測位置設定部は記憶部に記憶される過去の位置情報を用いて動き予測を行い、移動物体の現時刻における複数の予測位置を求める。その際、予測位置修正部53は、複数の予測位置のうちその移動元となる1時刻前の予測位置220との間に障害領域42aが存在する予測位置221を移動元位置から見て障害領域42aより手前の位置の予測位置241に修正する。物体位置算出部56は、修正された予測位置を含む複数の予測位置それぞれにて有する移動物体の画像特徴に基づいて、移動物体の現時刻における移動先位置を判定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】認識する物体の向きが画面内で変化する場合であっても、精度良く物体を認識することができる仕組みを提供する。
【解決手段】同一の物体の異なる方向に対応した複数の辞書のデータを格納する辞書記憶手段60と、前記物体に係る前記辞書を用いて所定方向の前記物体を認識する認識手段40と、画像の領域ごとに前記複数の辞書を切り替えて前記認識手段に適用する辞書・照合領域設定手段(切替え手段)70とを備え、前記画像の領域に用いられる前記辞書の適用領域は、重複していることを特徴とする。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、駐車枠の周囲にある、樹木、壁、他の車両等といった路面以外の物体画像に対して、車幅線、距離線、予想軌跡線等の補助線を重畳させないようにして、運転者に違和感を与えないようにする。
【解決手段】制御手段11は、撮像手段9により撮像された画像から駐車枠線を検出する駐車枠線検出手段17と、駐車枠線検出手段17により検出された駐車枠線の後端を検出する端点検出手段18とを備え、補助線描画手段19は、車両後端と端点検出手段18により検出された駐車枠線の後端との距離に基づいて、車幅線の長さ、距離線の本数、予想軌跡線の長さの少なくとも一つを変える。
(もっと読む)
映像処理装置、撮像装置、映像処理方法及びプログラム
【課題】 撮像部が撮像した撮像画像上の領域においてマスク画像を重畳するマスク領域を設定するために手間や時間をかけず、かつ、平面に表されるマスク領域にマスク画像を適切に重畳することを目的とする。
【解決手段】 球面座標において指定された領域を、撮像画像を表すxy座標平面に投影した対応領域の頂点(r0、r1、r2、r3)のx座標値とy座標値のそれぞれの平均値を算出し、算出したx座標値とy座標値の平均値をそれぞれx座標y座標とする点Gとマスク画像の高さの中点であり且つ幅の中点である点とが重なるようにマスク画像Rを撮像画像に重畳する(S304)。
(もっと読む)
映像監視システム
【課題】重要度の高い画像データの伝送遅延が大きくなった場合、画像の符号化レートを変更して低符号化レートで伝送し、表示側においては画質改善処理を施すことで、重要度の高い画像の伝送遅延を緩和するとともに高品質な表示画像を提供すること。
【解決手段】画像送信装置(1)において、センサからの出力情報に基づいて画像データに優先度を付与し自装置内部の送信画像メモリ(103)に格納する。また、画像送信装置(1)は画像データを格納する送信画像記憶手段を有し、この記憶容量に基づいて画像データの符号化レートを変更するか否かを判断する。画像データの符号化レートを変更すると判断した場合には、画像データの符号化レートを変更して画像受信装置(2)に送信する。画像受信装置(2)においては、受信した画像データを復号し、画像データの画質を改善する処理を実行する。
(もっと読む)
映像監視システム
【課題】監視対象の領域を撮影するカメラと、カメラに伝送回線を介して接続され、カメラにより撮影された映像を記録する記録装置とを有する映像監視システムにおいて、伝送回線または記録装置に異常が発生したとしても可用性を維持することができるようにする。
【解決手段】映像監視システム10は、伝送回線14及び記録装置16の少なくとも一方の異常を検出する異常検出部20と、異常検出部20により異常が検出された場合、カメラ12の動作モードを、ネットワークモードからスタンドアローンモードに切り替える制御部22とを有する。この切り替えにより、異常が発生したとしても可用性を維持することができる。
(もっと読む)
画像センサ
【課題】侵入物体よりも撮像部に近い位置に発生する外乱を侵入物体と誤判定することを抑制できる画像センサを提供する。
【解決手段】画像センサ100は、監視領域を撮影した監視画像を順次取得する撮像部10と、監視画像と背景画像から変化領域を抽出する変化領域抽出手段31と、変化領域が侵入物体の性質を持つ度合いを侵入物体属性値として算出する侵入物体属性値算出手段32と、変化領域が侵入物体以外の外乱である特定外乱の性質を持つ度合いを外乱属性値として算出する外乱属性値算出手段33と、外乱属性値の高い変化領域が所定時間内に所定頻度で重なって現れる領域を外乱領域として設定する外乱領域抽出手段35と、変化領域毎に変化領域が侵入物体か特定外乱かを判定する判定手段36を有し、判定手段36は、変化領域が外乱領域に重なる割合が大きいほど侵入物体と判定し難くする。
(もっと読む)
駐車支援装置
【課題】駐車支援のための駐車目標を、ユーザーによる操作を伴って簡単且つ精度よく設定する。
【解決手段】設定ボタンとして表示されて駐車目標を設定するための設定アイコンPに対するユーザーの第1の操作を検出すると共に、第1の操作に続く操作であり、モニタ装置に表示された表示画像上の所望の駐車位置Eに対するユーザーの第2の操作を検出して、ユーザーによる駐車目標の設定指示を受け付け、実際の空間内で表示画像上の所望の駐車位置Eが対応する領域において車両90が駐車可能な空間を駐車目標として、車両の周辺の状況を検出する周辺検出装置の検出結果を用いて駐車目標を設定する。
(もっと読む)
人体姿勢推定装置、人体姿勢推定方法、およびコンピュータプログラム
【課題】複雑な動きが含まれる人体の姿勢推定を高精度に行う。
【解決手段】リファレンスモーションデータから、動きのリズムを表して動きの突然的な変化が生じているフレームであるビートフレームを取得する動き解析部110と、リファレンスモーションデータを分割した複数のセグメントそれぞれについて、各潜在空間でGPDMを学習し、それぞれ学習したGPDM同士で遷移可能な潜在空間の座標として、ビートフレームに対応する潜在空間の座標を用いて推定するモデル構築部120と、ビートフレームと遷移可能な潜在空間の座標とに基づいて、ユーザの動きを撮影したユーザビデオデータの映像における人体姿勢を追跡する動き追跡部20とを備えた。
(もっと読む)
作業機械の周囲監視装置
【課題】作業機械の周囲を監視するに当って、周囲監視装置を操作する者の簡単な操作により監視に必要な情報を的確に取得できるようにする。
【解決手段】上部旋回体3には、後方カメラ13Bと、左右の側方カメラ13L,13Rと、前方カメラ13Fとが設けられ、カメラ13B,13L,13Rのカメラ画像を視点変換して個別俯瞰画像を生成して、表示キャラクタ21を中心とした監視用パノラマ画像として合成されて、前方カメラ13Fの画像であるカメラ画像と共にモニタ20の画像表示部20aに表示され、操作パネル部20bに設けたスイッチSW1〜SW5を適宜操作することによって、いずれかの個別俯瞰画像を生成する前のカメラ画像が拡大された状態で表示される。
(もっと読む)
21 - 40 / 592
[ Back to top ]