
Fターム[5C054FC12]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 関心領域の抽出;特定 (2,029)
Fターム[5C054FC12]に分類される特許
181 - 200 / 2,029
ネットワークシステム、登録方法、およびコントローラ
【課題】訪問者の画像をより有効に利用することができるネットワークシステムを提供する。
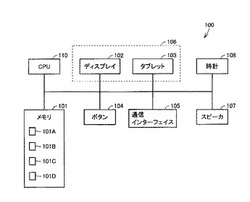
【解決手段】訪問者を撮影するためのカメラと、コントローラ100とを備えるネットワークシステムが提供される。コントローラ100は、メモリ101と、カメラから訪問者の画像を受信するための通信インターフェイス105と、登録者を識別するための識別情報を取得して、識別情報と訪問者の画像から得られる特徴情報とを対応付けてメモリ101に記憶するためのプロセッサ110とを含む。
(もっと読む)
通信システム、携帯端末、およびプログラム

【課題】撮像者に煩雑な操作を行わせることなく、撮像した動画を当該撮像者の意図した映像品質で遠隔地の動画表示装置のユーザに視聴させることを可能にする。
【解決手段】動画を撮像し当該動画を表す動画データを出力するカメラを内蔵する携帯端末に、ユーザの体動に伴って生じる当該端末の動きの大きさを検出する動き検出手段を設ける。そして、前記カメラにより撮像した動画を表す動画データを通信網を介して動画表示装置に表示する際には、当該動画データの1フレーム当たりのデータ量と通信網を介して当該動画データを送信する際のフレームレートの少なくとも一方を、動き検出手段により検出された動きの大きさに応じて調整しつつ送信する処理を実行させる。
(もっと読む)
画像処理装置
【課題】監視画像から背景画像を生成する画像処理装置において、監視空間内に似た色の服を着た人物が多く往来していたり、滞留する人物がいたりすると、生成した背景画像の一部に人の画素値が混入することがあった。
【解決手段】背景モデル生成部は、注目時刻より過去の入力画像の画素値から、注目画素300の特徴量の頻度分布330を生成し、当該頻度分布からなる背景モデルを生成する。背景特徴選出部は、注目画素300、近傍画素320の頻度分布330,340において集中度が最大ピークとなる正規分布331,342をそれぞれの画素の位置での背景特徴量として抽出する。背景モデル修正部は、注目画素300の頻度分布330のうち、近傍画素320の背景特徴量として選出される正規分布342に対応するものである正規分布332の頻度を高める修正を行う。
(もっと読む)
自転車検出装置及び照射装置
【課題】本発明は、自転車検出装置及び照射装置に係り、暗所において接近する自転車を正確に検出することにある。
【解決手段】照射手段から光が照射される方向を含む領域を撮影するカメラと、カメラに撮影される撮像画像内の光の強さが所定範囲内にあるか否かを判別する強度判別手段と、カメラに撮影される撮像画像内の光が上下に往復運動するか否かを判別する往復運動判別手段と、強度判別手段により肯定判定がなされ、かつ、往復運動判別手段により肯定判定がなされる場合に、前記方向に自転車が存在すると判定する自転車判定手段と、を設ける。
(もっと読む)
侵入者検知システム及び侵入者検知方法
【課題】侵入者を効率よく検知することを課題とする。
【解決手段】監視装置10は、互いの設置環境が共通するとともに互いの被写体が同一ではない複数のカメラ50にて撮像されたそれぞれの画像を取得する。さらに、監視装置10は、取得した複数の画像のそれぞれについて画像変化を検出する。さらに、監視装置10は、画像変化が他の同一時刻の画像にて検出されていた場合に、環境変化による侵入者の誤検知と判定する。さらに、監視装置は、侵入者の誤検知の判定結果に基づいて検知結果を出力する。
(もっと読む)
異常パターンの発見
【課題】 異常パターン発見のための方法、システム及び製造物品を提供する。
【解決手段】 複数の異なるグリッドに分割されたビデオ・データ画像フィールドにおいてオブジェクトの移動の軌跡が追跡される。ビデオ・データから軌跡に関する大域的画像特徴を抽出し、これを学習軌跡モデルと比較して、学習軌跡モデルへの適合性の関数として大域的異常検出信頼度判定値を生成する。また、オブジェクト軌跡を含む画像フィールド・グリッドの各々についての局所的画像特徴を抽出し、これをグリッドについての学習特徴モデルと比較して、グリッドの学習特徴モデルへの適合性の関数として各々のグリッドについての局所的異常検出信頼度判定値を生成する。大域的異常検出信頼度判定値をグリッドについての局所的異常検出信頼度判定値に融合させて、追跡されるオブジェクトに関する融合異常判定とする。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】複数の遮蔽物が重なり合って見える環境であっても、安定した物体追跡を可能にすることを目的とする。
【解決手段】画像から追跡対象を検出し、追跡する情報処理装置であって、追跡対象を検出できなかった場合に追跡対象が物体によって遮蔽されたか否かを判定する判定手段と、判定手段で追跡対象が物体によって遮蔽されたと判定された場合、画像より物体の領域と、物体と重複する物体の領域と、を抽出する抽出手段と、抽出手段で抽出された領域を関連付け、関連付けた領域に基づいて、次に追跡対象が現れる領域を設定する設定手段と、を有することによって課題を解決する。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
オブジェクト検知装置、およびオブジェクト検知プログラム
【課題】オブジェクトの検知精度を確保し、且つ、本体のコストダウンを図ったオブジェクト検知装置を提供する。
【解決手段】オブジェクト検知装置1は、画像処理部3が予め定めた第1の時間に渡って撮像装置10が監視エリアを撮像したフレーム画像から第1の時間平均画像を生成するとともに、予め定めた第2の時間に渡って撮像装置が監視エリアを撮像したフレーム画像から第2の時間平均画像を生成する。第1の時間は、第2の時間よりも長い。また、画像処理部3は、第1の時間平均画像と、第2の時間平均画像との差分画像を生成する。画像処理部3は、差分画像にあらわれたオブジェクトの形状や大きさ等から、そのオブジェクトの種類を判別する。
(もっと読む)
情報提供装置、システム、方法及びプログラム
【課題】有用な情報提供サービスを実現できる情報提供装置が求められる。
【解決手段】本実施形態によれば、情報提供装置は、映像取得部と、画像認識部と、カメラ追尾制御部と、表示制御部とを備えた構成である。映像取得部は、カメラから目標物体の映像データを取得する。画像認識部は、前記映像データに基づいて指定された目標物体を認識する。カメラ追尾制御部は、前記画像認識結果に基づいて、前記カメラを前記指定の目標物体に追尾させる。表示制御部は、前記指定の目標物体に追尾している前記カメラから取得される映像データを表示装置に出力する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】複数の画像を効率よく処理する画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】複数の画像取得部は各々画像を取得し、車両情報取得部は車両の移動状態を示す車両情報を取得し、画像補正量算出部は複数の画像取得部のうち1つの画像取得部が取得した第1の画像と、他の画像取得部が取得した第2の画像との位置関係に基づき画像補正量を算出し、画像補正値算出部は、車両情報に基づいて推定した位置関係に基づき当該画像補正量を算出する。
(もっと読む)
監視システム
【課題】検出機能が限定されない監視カメラを備える監視システムを提供することを目的とする。
【解決手段】監視対象領域を撮影し、撮影した画像を送信するカメラ100とカメラ100より受信した画像から監視対象領域における検出対象を検出し、検出結果を送信するサーバ200とを備える。カメラ100は、撮影した画像を保持するメモリ4と、サーバ200が検出対象を検出するために用いる画像に関する情報である検出画像情報に従って、撮影した画像を変換する画像変換部3と、画像変換部3で変換された変換後画像をサーバ200に送信するカメラ送信部8とを有する。サーバ200は、検出画像情報をカメラ100に通知する検出画像情報通知部16と、登録情報に基づいて、カメラ送信部8から送信された変換後画像における検出対象の有無を検出する検出部14と、検出部14で検出した検出結果をカメラ100に送信する検出結果通知部17とを有する。
(もっと読む)
物体検出装置及び方法、並びにプログラム
【課題】 検出性能を低下させずに車両周辺の物体を高速で検出する。
【解決手段】 物体検出装置10は、車両周辺を撮影した映像を、その映像から画像特徴を抽出した特徴映像に変換する映像変換部20と、特徴映像を複数の領域に分割して合成する映像分割合成部30と、合成映像を走査して第一の物体検出処理を行う第一物体検出処理部40と、第一の物体検出処理の結果から物体候補位置を求める物体候補位置指定部50と、物体候補位置に対して第二の物体検出処理を行う第二物体検出処理部60を備える。
(もっと読む)
車両用表示装置
【課題】モニタを大型化せず、しかも、ドライバにスイッチ操作の負担を負わせることなく、従来よりも広い範囲を確認することができる車両用表示装置を提供する。
【解決手段】車両用表示装置は、運転者撮影用カメラと、後方撮影用カメラと、モニタとを備えている。ドライバが前方を向いて運転しているときに領域Hに顔部が位置する場合は、後方撮影用カメラで撮影した画像のうち、中央部分の画像2を切り出してモニタに表示する。ドライバが顔を左側に動かした場合には、中央部分よりも右方の画像、顔を右側に動かした場合には中央部分よりも左方の画像をモニタに表示する。そのため、この自動車用表示装置は、顔を左右に移動するだけの簡単な操作で、画像2から外れた位置にあるものを、モニタを通じて確認することができる。
(もっと読む)
計算装置、計算方法及び計算プログラム
【課題】手間を掛けずに精度高く、カメラの設置高や設置角度を計算可能な計算技術を提供することを目的とする。
【解決手段】計算装置は、各々異なる位置にあるときの同一の対象物が同一のカメラにより各々撮影された複数の画像を対象物毎に取得し、対象物毎に、複数の画像及び対象物の平均の高さを用いて、設置角度及び設置高を計算し、当該設置角度及び設置高に対して投票を行い、投票を行った回数が最も多い設置角度及び設置高を決定する。
(もっと読む)
トンネル壁面の展開画像取得システム
【課題】トンネル壁面の展開画像を取得するシステムについて、得られた立体視可能な展開画像が現実の壁面の状態を正確に反映できるようにし、その反映の度合いを簡単に判定できるようにする。
【解決手段】システム10は、トンネルを走行する車両11と、車両11に搭載されたビデオカメラ12と、各ビデオカメラ12が撮像した画像データを処理可能な画像処理部13とからなる。画像処理部13は、画像データの各コマ上の第1および第2ラインから短冊形の第1および第2視差画像をサンプリングし、両ラインの中間から短冊形の直視画像をサンプリングする。各画像を横方向に配列してカメラ12ごとに第1および第2視差連続画像、直視連続画像を合成する。各連続画像を縦方向に配列して、第1および第2視差展開画像、直視展開画像を合成する。第1および第2視差展開画像を赤または青の着色画像として出力して立体視可能とする。これとフルカラー画像として出力した直視展開画像を比較可能とする。
(もっと読む)
駐車支援装置
【課題】駐車・出車操作時に適切な画像を表示し、運転者の駐車・出車操作を支援する。
【解決手段】自車両に取り付けられたカメラ1a〜1dの撮像画像をそれぞれ取得する撮像画像取得機能と、撮像画像から自車両周囲の合成画像を生成する合成画像生成機能と、自車両が目標駐車位置へ移動する際又は自車両が駐車位置から他の位置へ移動する際の車両情報に基づいて駐車誘導軌道又は出車誘導軌道を含む運転支援情報を生成する運転支援情報生成機能と、自車両を移動させる際に車両側から取得した操舵角度に基づいて、自車両の周囲に存在する可能性のある障害物を見るための監視方向を算出する監視方向算出機能と、監視方向を見る監視画像を取得する監視画像取得機能と、運転支援情報が重畳された前記合成画像を表示させるとともに、取得された監視画像を表示させる表示制御機能と、を実行する制御装置10を備えた駐車支援装置を提供する。
(もっと読む)
画像処理装置、画像処理システム、及び画像処理方法
【課題】俯瞰画像における撮像画像の不連続性による影響を抑制する。
【解決手段】画像処理装置は、車両の進行方向またはその反対方向に対応する第1の撮像画像と、前記車両の進行方向軸と交差する方向に対応する第2の撮像画像の重複領域に含まれる物体の位置を検出し、前記第1の撮像画像に、前記物体が第1の位置にあるときに第1の評価値、前記車両の進行方向軸からの距離がより大きい第2の位置にあるときに前記第1の評価値より小さい第2の評価値を割り当て、前記第2の撮像画像に、前記物体が前記第1の位置にあるときに第3の評価値、前記第2の位置にあるときに前記第3の評価値より大きい第4の評価値を割り当て、前記評価値が大きい方の撮像画像に前記物体が含まれるように境界を決定して、前記第1、第2の撮像画像をつなぎ合わせるので、撮像画像の不連続性を抑制できる。
(もっと読む)
車両用表示装置
【課題】視認者による検出対象物の知覚を的確に支援できる車両用表示装置の提供。
【解決手段】車両の前方領域90を撮影する近赤外線カメラ10によって生成される前方画像50を、表示画面40aに表示する車両用表示装置100である。車両用表示装置100は、前方画像50を取得する画像取得部31と、予め設定された検出対象物としての歩行者の画像53を検出する歩行者検出部35と、歩行者画像53を含む切出画像60を、前方画像50から切り出す切出部33と、切出画像60に含まれる歩行者画像53の画素数が、前方画像50に含まれる歩行者画像53の画素数よりも多くなるように、前方画像50及び切出画像60のうち少なくとも一方の画像の画素数を調整する画像縮小部37と、切出画像60を前方画像50に重畳して表示画面40aに表示する合成処理部39及び液晶ディスプレイ40と、を備える。
(もっと読む)
181 - 200 / 2,029
[ Back to top ]