
Fターム[5C122FH13]の内容
Fターム[5C122FH13]に分類される特許
21 - 40 / 1,229
画像処理装置及びプログラム
【課題】画像のぶれを考慮して画像関連処理を適正に行うことができる使い勝手の良い画像処理装置を提供する。
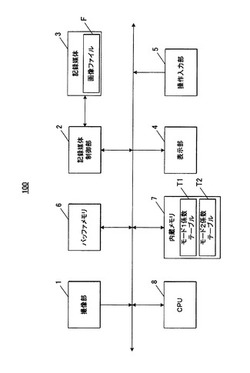
【解決手段】撮像装置100であって、検索処理により検索される検索候補と検索対象との類似度を算出する類似度算出処理と、算出された類似度が所定の判定値よりも大きいか否かに応じて検索処理の内容を異ならせるように制御する検索処理と、検索対象の種類やズーム倍率に応じて類似度判定に係る所定の判定値を変更する判定値変更処理とを行うCPU8を備える。
(もっと読む)
画像処理システム

【課題】球面収差復元用の復元フィルタを補正した補正フィルタでボケを復元する。
【解決手段】撮像装置100は撮影光学系110により結像された結像画像を用いて再生画像を作成する。撮像装置100は再生画像のボケを復元する。再生画像のボケの度合いは方向に応じて異なる。撮像装置100はEEPROM107とDSP103とを有する。EEPROM107は復元フィルタを補正した補正フィルタを格納する。DSP103は補正フィルタにより再生画像のボケを復元する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び記憶媒体
【課題】ローリングシャッタ歪み成分を安定して正確に推定することができる画像処理装置、画像処理方法及び画像処理プログラムを提供する。
【解決手段】画像処理装置1は、画像入力部10、動きベクトル取得部11及び歪み成分推定部12を備える。画像入力部10は、複数のフレーム画像を入力する。動きベクトル取得部11は、2つのフレーム画像間の平行移動量を取得する。歪み成分推定部12は、フレーム画像間の動きを示す動き行列が平行移動成分及びローリングシャッタ歪み成分のみからなると近似し、平行移動量を用いてローリングシャッタ歪み成分に含まれる仮の歪み係数をフレーム画像ごとに算出し、算出された複数の仮の歪み係数を用いて歪み係数を推定する。
(もっと読む)
画像合成装置、その制御方法、および制御プログラム
【課題】動画像を合成する際、合成枚数に拘わらず処理時間およびメモリへのデータ転送量が増大することなく画像合成処理を行う。
【解決手段】画像合成装置は、複数のフレームを有する動画像が入力画像としてされ、入力画像において予め設定された数のフレームを合成して合成画像を得る。画像加算部109は予め設定された数のフレームを合成して第1の合成画像を得る。画像加算部および画像減算部110は第1の合成画像が得られた後、別の1つのフレームの画像の合成を行う際、第1の合成画像に関して第1の合成画像における所定のフレームの画像を減算するとともに、別の1つのフレームの画像を加算して合成画像とする。
(もっと読む)
ブレ補正装置、ブレ補正方法及び帳票
【課題】PSFを用いて画像のブレを補正する場合に、比較的少ない演算量で、かつ、簡易な構成で、かつ、容易な操作で、高精度のブレ補正を行うことができるブレ補正装置を提供すること。
【解決手段】ブレ補正装置100は、撮影画像からレイアウトマーカを検出するレイアウトマーカ検出部102と、PSF推定用マーカの位置を求める推定用マーカ位置算出部104と、PSF推定用マーカの大きさを求める推定用マーカサイズ算出部105と、基準となるPSF推定用マーカ画像を生成する推定用マーカ基準画像生成部106と、基準となる推定用マーカ画像とそれに対応する撮影画像中の推定用マーカ画像とを用いてPSFを推定するPSF算出部108と、推定されたPSFを用いて撮影画像のブレを補正するブレ補正部109と、を有する。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム
【課題】より安定的な手振れ補正処理を行う。
【解決手段】動きベクトル検出部は、撮影部により連続的に撮影される画像ごとに複数の動きベクトルを検出し、ヒストグラム算出部は、各画像の複数の動きベクトルについてのヒストグラムを算出し、加速度ベクトル算出部は、ヒストグラムの変化に応じた加速度ベクトルを算出する。そして、手振れ補正量算出部は、加速度ベクトル、および、1フレーム前の画像に対する処理で用いられた補正用の動きベクトルに基づいて、現在のフレームの画像に対する処理で用いる補正用の動きベクトルを推測し、推測した補正用の動きベクトルに応じた手振れ補正量を算出する。本技術は、例えば、デジタルビデオカメラに適用できる。
(もっと読む)
像振れ補正装置及びそれを具備する光学機器、撮像装置、ならびに像振れ補正装置の制御方法
【課題】 小型で機動性が高く、平行振れの高精度な補正を行う防振制御装置を提供する。
【解決手段】 振れによる画像振れを補正する振れ補正手段6806と、振れの角速度を検出する第1振れ検出手段6807pと、記第1振れ検出手段とは異なる方式で振れを検出する第2振れ検出手段101pと、手振れ周波数帯域である第2周波数帯域に含まれ、該第2周波数帯域よりも狭い第1周波数帯域における第1振れ検出手段からの出力に基づく第1信号と第2振れ検出手段からの出力に基づく第2信号とから補正値を演算する演算手段308と、補正値を用いて第1振れ検出手段からの出力を補正する出力補正手段309と、出力補正手段で補正された第1振れ検出手段からの出力に基づいて、振れ補正手段を前記第2周波数帯域において駆動する振れ補正駆動手段6809とを有する。
(もっと読む)
デジタル一眼レフカメラ
【課題】カメラブレや被写体ブレによる画質劣化を軽減し、良好な画質の画像を容易に撮影することのできるデジタル一眼レフカメラを提供すること。
【解決手段】カメラシステム1のボディーマイコン12は、検出された被写体の動きに基づいて被写体速度を算出し、被写体速度が所定の閾値A以上か否かを判別し、被写体速度が閾値Aより小さい場合には、交換レンズ2内の交換レンズ用カメラブレ補正装置82、あるいはカメラ本体内のカメラ本体用カメラブレ補正装置75を制御してカメラブレ補正を動作させ、被写体速度が閾値A以上の場合には、デジタル信号ゲイン設定部111のゲインを高くしてISO感度をアップし、シャッター速度を速くして露出時間を短くするとともに、異なる露出条件により複数枚の画像を連続撮影する。
(もっと読む)
撮像装置
【課題】温度が低い場合でも、光学ファインダーを覗いたまま、顔検出を正確に行うことができるようにする。
【解決手段】撮像装置は、温度を検出する温度検出手段39と、被写体像を観察する光学ファインダー16と、被写体像の光を用いて被写体像中の顔を検出する顔検出手段15と、被写体像中に所定の表示を行う液晶表示部40と、制御手段42を有する。制御手段は、顔検出手段による被写体像中の顔の検出の開始時、液晶表示部の液晶を非表示状態とし、非表示状態にした後に顔検出手段により行われる顔検出の終了時、液晶表示部の液晶を表示状態にもたらすように制御する。制御手段は、温度検出手段で検出された温度が所定の温度よりも低い場合には、液晶表示部を非表示状態にした後、所定の時間が経過した後に、顔検出手段による顔検出を行わせる。
(もっと読む)
撮像装置、画像処理装置およびその方法
【課題】 異なる撮影位置から被写体を撮影した複数の画像データから任意のピント面にフォーカスを合わせた画像データを生成する。
【解決手段】 画像入力部110は、異なる撮影位置から被写体を撮影した複数の画像データ、および、撮影位置を示す情報を入力する。フォーカス座標取得部111は、複数の画像データの一つが表す画像におけるフォーカスを合わせる位置を示す少なくも一つのフォーカス座標を取得する。距離推定部112は、複数の画像データおよび撮影位置を示す情報から被写体の撮影距離を推定する。仮想ピント面生成部114は、フォーカス座標および撮影距離からピント面を示す情報を生成する。画像合成部115は、撮影位置を示す情報およびピント面を示す情報に基づき複数の画像データを合成して、ピント面にフォーカスを合せた画像データを生成する。
(もっと読む)
撮像装置及び撮像方法
【課題】複数の撮像部を有し、各撮像部がそれぞれ撮影を行うことで、異なる複数視点からの撮影画像を取得し、各撮影画像を合成することで、撮影時に設定したフォーカス距離とは異なるフォーカス距離の画像を生成できるようになっている多眼カメラにおいて、重要被写体がある距離を合成フォーカス距離とした場合の超解像可能性を上げる。
【解決手段】異なる複数視点からの撮影を行う複数の撮像手段と、前記撮像手段により撮像された画像から重要被写体を抽出する抽出手段と、前記抽出された重要被写体に対する超解像可能性を算出する算出手段と、前記算出された超解像可能性に応じて、撮像パラメータを調整する調整手段とを備える。
(もっと読む)
撮像装置
【課題】移動被写体を適切に検出することができる撮像装置を提供すること。
【解決手段】被写体を撮像して画像信号を生成する撮像部110と、振動を検出して、振動に応じた検出信号を出力する振動検出部211と、光軸と交差する方向に移動可能な振れ補正光学系を有する振れ補正部240と、前記検出信号に基づいて、像振れを補正するように前記振れ補正部を駆動させるための目標駆動量を演算する駆動量演算部217と、前記検出信号に基づいて、像振れ量を演算する像振れ量演算部215と、前記画像信号に基づいて、前記被写体の動きベクトルを演算する動きベクトル演算部122と、前記像振れ量と、前記目標駆動量に対応する像の変位量との差を、残留像振れ量として算出する残留像振れ量算出部140と、前記動きベクトルと、前記残留像振れ量とに基づいて、前記被写体が移動被写体であるか否かを判別する判別部150とを備えることを特徴とする撮像装置。
(もっと読む)
手ブレ補正装置およびデジタルカメラ
【課題】スペースを節約しつつも大きな手ブレにも高速で対応可能な手ブレ補正機構を得る。
【解決手段】角速度センサ15Lでカメラのロール角を検出する。角速度センサ15X、15Yでカメラのピッチ角、ヨー角を検出する。ピッチ角、ヨー角から撮像センサでの並進ブレ量を算出する。検出されたロール角に基づき手ブレ補正機構16を駆動し、回転ブレを補正する。算出された並進ブレ量に基づき、撮影される画像から並進ブレを補正した領域を切り出しスルー画像としてモニタ13に表示する。
(もっと読む)
3D画像撮像装置及びプログラム
【課題】ユーザが近景撮像を行っているのか又は遠景撮像を行っているのかを判断し、各撮像において適切に手ぶれ補正及び視差調整を行うことで、眼精疲労や画像酔いを誘発しにくい、快適な3D画像の撮像が可能な3D画像撮像装置及びプログラムを提供する。
【解決手段】手ぶれ補正部403は、左眼用及び右眼用撮像データから手ぶれ補正用の領域を除くことで手ぶれ補正を行う。視差調整部404は、左眼用及び右眼用撮像データから水平方向の視差調整用の領域を除くことで垂直方向の視差調整を行う。判定部402は、近景撮像及び遠景撮像の判断を行い、近景撮像であると判断した場合は、手ぶれ補正部403が前記手ぶれ補正を行い、遠景撮像であると判断した場合は、視差調整部404が水平方向の視差調整を行った後、手ぶれ補正部403が前記手ぶれ補正を行う。
(もっと読む)
撮像装置および撮像装置の制御プログラム
【課題】現在の手振れ量が設定された撮影条件に対して許容されない範囲である場合に、ユーザは、カメラに設定し得る他の撮影条件に変更すれば現在の手振れ量が許容されるのか、判断に迷うことがあった。
【解決手段】撮像装置は、撮像装置に加えられる振れの振れ量を検出する振れ量検出部と、振れ量を許容する許容撮像条件を算出する算出部と、許容撮像条件が撮像装置において設定可能であるか否かを判断する判断部と、判断部により許容撮像条件が設定可能であると判断された場合に、振れ量と許容撮像条件により許容される許容振れ量とを視覚的に表示する表示制御部とを備える。
(もっと読む)
画像処理プログラム、画像処理方法、画像処理装置、撮像装置
【課題】複数枚の画像間に生じた揺らぎに対してロバストな超解像処理を実現する。
【解決手段】本発明の画像処理プログラムは、位置ずれを含む複数枚の画像から、それら画像の各々よりも解像度の高い合成画像を生成する画像処理方法であって、前記複数枚の画像の各々を周波数分解し、複数階層の空間周波数成分を画像毎に生成する分解ステップ(S43)と、前記分解ステップにより画像毎に生成された複数階層の空間周波数成分を、階層毎に画像間で平均化し、階層毎の平均空間周波数成分を生成する平均化ステップ(S48)と、前記平均化ステップにより生成された前記階層毎の平均空間周波数成分を合成し、合成画像を生成する合成ステップ(S411)とを含む。
(もっと読む)
撮影装置
【課題】設定操作を容易にした撮影装置を提供する。
【解決手段】デジタルスチルカメラは、動作条件を設定する動作条件設定部51と、使用者による撮影指示が受け付けられることに応じて設定された動作条件に従って撮影し、画像データを記憶する撮影制御部57と、を備え、動作条件設定部51は、撮影制御部57により所定の撮影条件で撮影される場合、撮影指示が受け付けられた時点に設定されている動作条件を変更する変更部67を含む。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】動画像を再生する場合における高画質化を図ることが可能な、画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】フレーム画像からなる動画像を示す画像信号に基づいて、動画像を撮像した撮像装置の動きを示すカメラワークを検出する検出部と、検出されたカメラワークからぶれ成分を除いた第1補正カメラワークを算出する第1算出部と、画像信号と第1補正カメラワークとに基づいて、第1補正カメラワークに対応する補正フレーム画像を生成する生成部と、補正フレーム画像内に画像が存在しない補間領域が含まれる場合に、補間領域を補間する補間部とを備える画像処理装置が提供される。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】ユーザの所望する画質を簡単に設定する。
【解決手段】撮像装置1に適用される画像処理装置は、画像取得部41と、入力操作受付部43と、画質処理決定部46と、画質処理情報提示部47と、を備える。画像取得部41は画像のデータを取得する。入力操作受付部43は、画像取得部41により取得された画像のデータに対して、所定の範囲の選択操作を受け付ける。画質処理決定部46は、入力操作受付部43により受け付けられた所定の範囲に基づいて画像取得部41により取得される画像のデータに対して施される画質処理を決定する。画質処理情報提示部47は、画質処理決定部46により決定された画質処理に関する情報を提示する。
(もっと読む)
画像追尾装置
【課題】好適な追尾が可能な画像追尾装置を提供する。
【解決手段】画像追尾装置は、結像光学系からの像を繰り返し撮像して、被写界画像を順次取得する取得部と、順次取得された複数の被写界画像のうちの第1被写界画像と、第1被写界画像より後に取得された第2被写界画像とのそれぞれについて、所定の領域を基準領域として設定する設定部と、複数の基準領域のそれぞれについて差分を演算し、演算結果に基づいて移動体を検出する第1検出部と、第1検出部により検出された移動体を基準として、第2被写界画像の中で追尾対象となる画像の特徴を示すテンプレート画像を生成する生成部と、生成部により生成されたテンプレート画像を用いて、第2被写界画像よりも後に取得された第3被写界画像内の追尾対象の位置を検出する第2検出部とを備える。
(もっと読む)
21 - 40 / 1,229
[ Back to top ]