
Fターム[5C122GD04]の内容
スタジオ装置 (397,422) | カメラ/カメラ付属機器の支持 (2,858) | 雲台(パン/チルト) (855)
Fターム[5C122GD04]に分類される特許
81 - 100 / 855
画像処理装置、および画像処理方法
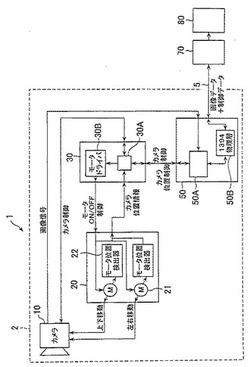
【課題】捕捉した画像を加工し、捕捉した解像度のまま維持する第1の画像領域と、画素を間引き第1の画像領域より画素数の少ない第2の画像領域をそれぞれ形成し、第2の画像領域を第1の画像領域を囲成する部位に形成することにより所望位置の画像データを解像度の異なる2領域を持たせて人の目に近い機能を持った画像データとして形成し、併せて、原画像のデータ量を減らし1本のケーブル、例えば、IEEE1394ケーブルにより転送することを可能とする。
【解決手段】カメラ手段2中に、捕捉した画像データを加工し、捕捉した画像解像度のまま維持する第1の画像領域と、画素を間引き第1の画像領域より画素数の少ない第2の画像領域をそれぞれ形成し、第2の画像領域を第1の画像領域を囲成する部位に形成することにより原画像のデータ量を減らし原画像の画像データを画像解像度の異なる2領域を持った画像データとし、この画像データをカメラ通信制御手段70に転送するデータ転送手段50を具備している。
(もっと読む)
撮像装置

【課題】 従来の撮像装置では、流星が光って出現してから消えるまでの出現した流星全体を、1枚の画像内に収めて撮像することは困難であった。
【解決手段】 流星情報取得手段により取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向および流星12が光って出現する天空範囲が、PC4により演算して求められる。カメラ1の画角は、PC4によって求められた天空範囲に合う画角に、画角設定手段によりS5において設定される。カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で、撮像手段により流星12を撮像させて、S8において流星画像を取得する。このため、流星12が光って出現する天空範囲に合う画角にカメラ1の画角が設定されることで、光って出現する流星12全体の画像を1枚の画像内に収めて簡単に撮像できる。
(もっと読む)
デジタルイメージ安定化装置及び方法
【課題】デジタルイメージ安定化装置及び方法を提供する。
【解決手段】デジタルイメージ安定化方法は、理想的な特徴点を選択するための特徴点分類アルゴリズム、選択された特徴点のモーションベクトルを得るための検索アルゴリズムに基づいた計算上効率的なタイルベクトル、及びベクトルサイズ比率とアングル差とに基づいた選択された特徴点のペアをグループ化するための特徴点モーションベクトルグループ化/比較プロセスを含む。デジタルイメージ安定化方法は、タイルモーションベクトルグループ及び特徴点モーションベクトルグループの複数の変換の各々のスコアリングに基づいて、ビデオフレームのシーンで静止/背景オブジェクトを表わす主要変換を選択する段階と、静止(背景)グループのヒストリー及び複数のモーションベクトルグループの各々のヒストリーに基づいて大型移動オブジェクトを除外する段階と、を含む。
(もっと読む)
施工状況記録システム
【課題】施工現場において撮像情報を利用した施工管理の容易化を図る。
【解決手段】本発明に係る施工状況記録システムは、予め設定されている複数の撮像位置を前記撮像手段に順次撮像させる撮像ターンを、繰り返し実行する撮像制御処理と、各撮像ターンで撮像された複数の撮像情報を合成して合成撮像情報を生成する合成処理と、
合成撮像情報に対し、合成の際、使用された少なくとも1つの撮像情報の撮像日時に基づいて、日時タグを決定する日時タグ決定処理と、指定手段にて指定された指定日時に対応する日時タグを有する合成撮像情報を表示出力させる表示出力処理と、を備えることを特徴としている。
(もっと読む)
撮像装置、像振れ補正方法、及びプログラム
【課題】像振れ補正時の周辺光量不足補正をより適切に行うことが可能な撮像装置、像振れ補正方法、及びプログラムを提供する。
【解決手段】被写体像を光電変換する撮像部8または光学要素部9のいずれか一方を駆動し、駆動された撮像部8または光学要素部9の位置情報を生成する被像振れ補正機構11を有する撮像装置において、補正画像生成部6は、撮像装置1の振れ情報と振れ情報により決定された周期で取得される位置情報とに基づいて、被像振れ補正機構11における補正によって撮像部8の撮像面に生じる周辺光量不足に対して補正を行わせる。
(もっと読む)
撮影装置、合成画像作成方法及びプログラム
【課題】複数の画像を合成して作成されるワイド画像の品質を向上させる。
【解決手段】CPU113は、ワイド画像を複数の領域に分ける。一般に、撮影する場合、人物等の重要な撮影対象はワイド画像の中央付近にセットされる。従って、CPU113は、ワイド画像の中央付近の領域を最初の撮影領域に設定する。それに続いて、CPU113は、周辺部に向かって、順次、渦巻き状に撮影領域を設定する。CPU113は、このように撮影順序を設定すると、撮像部11は、この撮影順序に従って、複数回、撮影を行う。そして、画像合成処理部15は、得られた複数枚の画像を合成して、ワイド画像を作成する。
(もっと読む)
撮像装置
【課題】追加部品によるコストアップ無しに、低温環境下でも装置内温度を調整することが可能な撮像装置を提供すること。
【解決手段】撮像装置101は、撮像面上に結像する光信号を電気信号に変換する撮像素子と、光を撮像素子に導く光学系112と、駆動手段105、106、107と、温度検出手段108、109、110と、駆動手段の駆動電圧を制御する制御手段103を備える。駆動手段は、機械的動作可能な1つ以上の構成部品を駆動する。温度検出手段は、装置内の一つ以上の箇所の温度を検出する。制御手段は、温度検出手段による検出温度に応じて駆動電圧における保持通電電圧の調整を行って装置101内の温度調整を行う。
(もっと読む)
雲台装置および雲台撮像システム
【課題】 特に可搬型の雲台装置に最適で、水平面に対して傾いて設置しても、パン・チルト操作に対する画像の移動方向に違和感を与えない操作形態を実現する雲台装置および撮像システムを提供する。
【解決手段】 傾き検出手段を有する傾き検出部によって検出した水平に対する雲台装置の傾きに応じて、制御部が所定の条件式を満たすように算出したパン・チルト駆動量だけパン・チルト駆動部を連動制御する。
(もっと読む)
モーションセンシティブ画像取込装置を安定的に支持するためのウエイト付き取付装置
【課題】携帯電話に組み込まれたモーションセンシティブ画像取込装置を安定的に支持する。
【解決手段】ウエイト付き取付装置は、基台150およびハンドル接続部で基台150に接続されたハンドルを有する手持ちの均衡構造体132と、画像取込中に画像取込装置12を保持するための基台150上の取付具100と、保持された画像取込装置12とともに取付具100にアッセンブリーとして取り付けられたバラストウエイトとを含む。アッセンブリーおよび均衡構造体132の一体とした重心Pは、画像取込中に取付装置のバランスを取るためにハンドル接続部の下方であってハンドル接続部に近接して位置する。
(もっと読む)
撮影システム
【課題】観察対象を良好に撮影できるようにカメラの撮影範囲を変化させる。
【解決手段】注視点検出部21は、視線センサ4のアイカメラ42が撮影したモニタ3を観察するユーザの目の映像より、ユーザが注視している(見ている)、モニタ3の表示画面上の座標を注視点座標として算出する。観察制御部22は、ユーザが、モニタ3の表示画面の中央領域外の位置を所定時間(たとえば、1秒)以上注視している場合、当該注視している位置に表示されている標本13上の位置が、顕微鏡用カメラ16の撮影範囲の中心に撮影されるように、すなわち、当該位置がモニタ3の表示画面の中心に表示されるように、顕微鏡装置1のステージアクチュエータ11を制御して、ステージ12を標本13共々移動する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】撮像手段の位置を正しく推定し、好適な画像データの結合結果を得ることにある。
【解決手段】制御部103は、カメラ101を移動させつつ、撮像処理を複数回実行させる。制御部103は、カメラ101により撮像された複数の画像データ間の重複領域を評価し、その評価結果に基づいて、複数の画像データの夫々に対応するカメラ101の位置を推定する。そして、制御部103は、推定してカメラ101の各位置に基づいて、複数の画像データの結合処理を実行する。
(もっと読む)
撮像装置支持機構
【課題】構成がコンパクトで、かつ駆動制御を容易にできる撮像装置支持機構を提供する。
【解決手段】ソレノイド5のプランジャ55を退避位置に移動させる。モータ4の出力軸41が回転すると第1傘歯車11と伝達部材45が回転する。接触部48は第2傘歯車12側に付勢されないので第2傘歯車12は回転しない。故に、第3傘歯車13に固定されたカメラ17はチルト回転する。プランジャ55を突出位置に移動させた場合、接触部48は第2傘歯車12側に付勢されるので、第2傘歯車12も回転するので、第3傘歯車13に固定されたカメラ17はパン回転する。
(もっと読む)
多視点ロボットカメラシステム、多視点ロボットカメラ制御装置及びプログラム
【課題】マスターカメラから被写体までの距離値を正確に求め、多視点映像を撮影する。
【解決手段】複数台のロボットカメラ10と、多視点ロボットカメラ制御装置20とを備え、多視点ロボットカメラ制御装置20は、初期パラメータを格納するパラメータ格納部22と、方向操作されたマスターカメラ10Mの回転行列を生成する回転行列生成部23と、指定された距離値に基づいてマスターカメラ10Mの注視点を光軸上に設定する注視点制御部25と、スレーブカメラ10Sを方向制御して、スレーブカメラ10Sの注視点をマスターカメラ10Mの注視点に一致させる方向制御部26とを備え、注視点制御部25は、マスターカメラ10Mとスレーブカメラ10Sの撮影映像について所定の類似度が得られるまで、注視点を移動させる。
(もっと読む)
撮像装置
【課題】 ファンやヒーターを設けることなく、ドームカバー内面の曇りによる撮影画像の画質の劣化を迅速に除去可能な撮像装置を提供する。
【解決手段】 所定の撮影方向を撮影するカメラユニット10と、カメラユニット10を覆い、カメラユニット10の撮影視野を確保するための切り欠き部25aを有するドーム形状のインナーカバー25と、カメラユニット10を覆い、インナーカバー25の外側に沿うように設けられ、カメラユニット10及びインナーカバー25に対して独立に、パン方向に回転可能なドーム形状のドームカバー20と、インナーカバー25とドームカバー20との間に形成され、空気の対流が抑制された断熱空間部(P部)と、を備える。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
撮像装置及び撮像システム
【課題】補助光の照射に伴う消費電力を十分に削減することが可能な撮像装置を得る。
【解決手段】撮像装置としての監視装置3は、受光素子を有し、当該受光素子に電荷を蓄積する電荷蓄積期間を周期的に繰り返すことにより、対象物を撮像する撮像部12と、発光素子を有し、当該発光素子を点灯させることにより、撮像部12による撮像のための補助光を照射する照射部13と、撮像部12及び照射部13を制御する制御部14と、を備え、制御部14は、電荷蓄積期間においては発光素子が点灯し、電荷蓄積期間でない期間の少なくとも一部期間においては発光素子が消灯するように、撮像部12及び照射部13の動作を同期制御する。
(もっと読む)
監視カメラ装置
【構成】パン回転機構32またはチルト回転機構34は、方位変更指示に応答して監視カメラ10の方位を変更する。メインCPU30は、方位変更指示に従う方位情報を作成し、監視カメラ10の方位の基準方位への到達を検知する。メインCPU30はまた、パン回転機構32またはチルト回転機構34の変更処理による監視カメラ10の方位変更動作の速度を検知処理に関連して減速し、作成された方位情報が示す方位を監視カメラ10の方位の基準方位への到達の検知に応答して基準方位に修正する。
【効果】方位情報の精度を向上させることができる。
(もっと読む)
遠隔画像表示システム、装置および方法
【課題】画像取得手段の操作に関して遠隔指示を行う場合、操作指示者の意図する操作指示を操作者に直感的に正確に伝達する。
【解決手段】光学入力部から入力する画像をファインダ画像として表示するファインダ画像表示部と、ファインダ画像を通信回線を介して出力するファインダ画像出力部を含む画像取得手段と、通信回線を介して入力したファインダ画像をモニタ表示するモニタ表示部と、モニタ表示部のファインダ画像に対して入力された、ファインダ画像の入力方向または構図を含む画像取得に関する操作を指示する操作指示を、操作指示情報として出力する操作指示送信部を含む画像表示操作指示手段を備え、画像取得手段は、画像表示操作指示手段が出力する操作指示情報を入力し、操作指示の内容をファインダ画像表示部に表示する操作指示受信部を含む。
(もっと読む)
ドーム型カメラ
【課題】チルト角が大きい方向(水平方向に近い方向)を撮影する場合において、広い視野の確保と画質劣化の低減とを両立することのできるドーム型カメラを提供する。
【解決手段】ドーム型カメラ1は、チルト方向に回動可能なカメラレンズ4と、カメラレンズ4を覆うドームカバー3を備える。カメラレンズ4のチルト回動軸P2は、ドームカバー3の中心P1より天頂方向に位置しており、カメラレンズ4のチルト角が所定のしきい角度より大きくなるのに応じて、カメラレンズ4の光軸上に偏光フィルタ6または部分遮光フィルタを挿入する。
(もっと読む)
移動体監視装置
【課題】 比較的簡単なアルゴリズムを用いて、ズーム倍率を制御することにより、移動する被写体までの距離によらず、被写体の撮影画像中における大きさを所望の大きさに略一致させることを目的とする。
【解決手段】 略水平に移動する被写体3を撮影する撮像素子10と、指定されたチルト角αに基づいて、撮影軸2をチルト回動させる回転駆動部14と、チルト角α及びズーム係数Pに基づいて、ズーム倍率を求めるズーム倍率算出部15と、任意の上記チルト角に対応する上記ズーム倍率を推奨倍率として教示するための推奨倍率教示部18と、少なくとも1組の上記チルト角α及び上記推奨倍率に基づいて、ズーム係数Pを求めるズーム係数決定部17とを備えることにより、チルト角αによらず、撮影画像中における被写体3の大きさを推奨倍率教示部18による教示時の大きさに略一致させることができる。
(もっと読む)
81 - 100 / 855
[ Back to top ]