
Fターム[5C122HA76]の内容
Fターム[5C122HA76]に分類される特許
61 - 80 / 907
カメラ及びカメラの操作方法
【課題】 見やすいスルー画像や再生画像を表示させることができ、また、アイコンを表示させるための操作部材を用いることなく容易にアイコンを表示させることができるカメラを提供する。
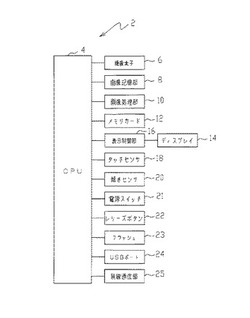
【解決手段】 スルー画像または再生画像を表示する表示部14と、前記表示部の初期姿勢に対する姿勢変化を検出する姿勢センサ20と、前記姿勢変化に応じて操作内容を示すアイコンを前記スルー画像または前記再生画像が表示されている前記表示部にスライドインさせて表示する表示制御部16とを備える。
(もっと読む)
撮像装置および撮像装置の制御プログラム

【課題】従来の装置では、ユーザは、表示部の表示を変更するために操作ボタン等を操作する必要があった。
【解決手段】撮像装置は、表示部と、表示部とユーザとの距離を計測する距離計測部と、被写体を撮像して画像データを取得する撮像部と、距離計測部の計測結果に基づいて、表示部における画像データの画像表示および撮像部の機能設定表示の少なくとも一方の表示を変更する表示制御部とを備える。表示制御部は、距離計測部の計測結果に基づいて、表示部における画像表示および機能設定表示の一方から他方へ変更する。
(もっと読む)
3軸電子コンパスを用いた方位測定方法および方位測定装置
【課題】3軸電子コンパスとこれを搭載した撮影装置の姿勢にかかわらず、撮影装置の特定方向、例えば撮影装置の撮影光学系の撮影光軸の方位を正確に測定できる3軸電子コンパスを用いた方位測定方法を得る。
【解決手段】3軸電子コンパスと、この3軸電子コンパスの傾斜を検出する傾斜センサとを用いて3軸電子コンパスに対する特定方向の方位を測定する方位測定方法であって、特定方向と水平面の成す仰角を傾斜センサから取得して、取得した仰角に応じて、3軸電子コンパスから得られる3つの出力値のうち、選択する2つの出力値を切り換える段階と、切り換えられた2つの出力値により地磁気の方位を取得する段階と、傾斜センサから特定方向回りの回転角を取得する段階と、取得した仰角、地磁気の方位、及び回転角に基づいて、切り換えによって発生する特定方向の方位のずれ角を算出する段階と、算出したずれ角により特定方向の方位を補正する段階とを有する。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】非力なCPUでも、撮像エリアがその可動域を超えない範囲内で、なるべく長い撮影時間をリアルタイムかつ高精度に設定する。
【解決手段】撮像面の撮像エリア上での天体像の移動情報に基づいて、撮像エリアの所定時間あたりの光軸直交方向の理論平行移動量及び光軸と平行な軸回りの理論回転角度量を算出し、撮像エリアの可動域における、撮像エリアの基準姿勢位置からの光軸直交方向の実平行移動可能量及び光軸と平行な軸回りの実回転可能角度量を対応付けて保持する移動可能量テーブルを取得し、算出した撮像エリアの所定時間あたりの理論平行移動量及び理論回転角度量と、取得した移動可能量テーブルが保持する実平行移動可能量及び実回転可能角度量とを比較して、撮像エリアを該撮像エリアの可動域の範囲内で移動させながら天体自動追尾撮影を完了させるための撮影時間を設定する天体自動追尾撮影方法。
(もっと読む)
光学装置およびその制御方法
【課題】撮影条件に応じてフォーカスレンズの振動収束待ち時間を変更して撮影時の無駄な待ち時間を短くすること。
【解決手段】フォーカスレンズの駆動制御によって焦点調節を行う制御手段は、フォーカスレンズの移動停止後の振動収束待ち時間を撮影条件によって変更する。絞り値が所定値よりも大きく、レンズ停止時の振動に伴うピントずれ量の許容範囲が大きい場合(S602)、タイマに設定する待ち時間T1は、ピントずれ量の許容範囲が小さい場合(S603)に設定する待ち時間T2に比べて短くなるように変更される。制御手段は、フォーカスレンズの停止指令を出力し、タイマにより計時される時間の経過を待ってからフォーカスレンズの移動制御を終了させる。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】追尾条件に応じて、無駄な演算処理を省いてCPUの負担を低減しながら、最適な駆動周期で撮像素子を駆動して天体を点像として撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮影装置に内蔵する所定の追尾手段を駆動させながら追尾撮影する天体自動追尾撮影方法であって、前記撮影装置の撮像素子の撮像面上に形成される天体像の、日周運動による所定時間あたりの撮像面上での移動距離を算出するステップ;及び算出した前記天体像の所定時間あたりの撮像面上での移動距離と、前記撮像素子の画素ピッチとに基づいて、前記追尾手段の駆動周期を設定するステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
画像処理装置
【課題】適切に画像ファイルを生成する技術を提供する。
【解決手段】受付部102が画像データの取得指示を受け付けると、画像データ取得部104は、メモリ部130から画像データを取得し、JPEG形式で圧縮する。姿勢特定部122は、加速度センサの検出値を用いて画像処理装置10の姿勢情報を特定する。方向特定部124は、地磁気センサの検出値と、姿勢特定部122により特定された姿勢情報とを用いて、レンズ光軸の方位角を特定する。姿勢特定部122により画像処理装置10が水平姿勢にあることが判定された場合、方向特定部124は、レンズ光軸方向を用いず、画像処理装置10における所定の方向と、地磁気センサの検出値とから、レンズ光軸の方位角を特定する。
(もっと読む)
撮像装置
【課題】並べて表示された複数の画像に対する違和感を緩和することができる撮像装置を提供する。
【解決手段】画像記録部12は、イメージセンサ4により取得される被写体の画像から得られる動画像を記録すると同時に、動画像撮影中に指示されるタイミングで複数の静止画像を複数の抽出画像として記録する。画像記録制御部11は、複数の抽出画像と第1動き情報とを関連付けて画像記録部12に記録するように制御する。マイクロコンピュータ3は、動画像における被写体の動きに関する第1動き情報を動画像に応じて生成し、第1動き情報に基づいて複数の抽出画像の配置を決定する。画像表示制御部13は、マイクロコンピュータ3の決定結果に基づいて、複数の抽出画像をデジタルカメラ1の表示部に並べて表示させる。
(もっと読む)
カメラ装置の原点ずれ補正方法及びカメラ装置
【課題】 システムに複雑な画像処理機能を搭載しなくても、様々なシーンで利用可能なカメラ装置の原点ずれ補正を実現する。
【解決手段】 カメラ装置のカメラアングルを設定した際に、当該カメラアングルのパラメータとカメラ装置が撮影した映像とを記憶部に保存する。カメラ装置の原点ずれ補正を実行する際に、記憶部に保存されたカメラアングルのパラメータを取得し、カメラ装置の現在のカメラアングルのパラメータを取得する。そして、保存されたパラメータと、現在のパラメータとが一致する場合に、カメラ装置の現在の映像に記憶部に保存された映像を重畳して表示部に表示する。
(もっと読む)
立体画像を表示可能なカメラ
【課題】立体視可能な被写体像だけを立体画像としてユーザに視認させる。
【解決手段】3D画像表示可能なカメラにおいて、カメラの姿勢を検知する姿勢センサを備える。スルー画像を立体画像として表示部に表示する立体画像撮影モードにおいて、カメラが縦位置になると、立体表示から平面表示に切り替え、CCDから読み出される画像信号に基づいて2D画像(平面画像)を表示する。そして、カメラが縦位置姿勢でレリーズボタンが全押しされると、そのときの表示方式に従った画像、すなわち平面画像をメモリに記録する。
(もっと読む)
光学機器およびその制御方法
【課題】振れ補正の駆動に関する信号で姿勢検知を行う光学機器において、より大きな手振れ角度を実現しつつ、姿勢検知の精度の低下を抑制する。
【解決手段】補正部材を駆動して撮影画像のブレを補正する機能を備えた光学機器であって、光学機器の振れを検出する振れ検出部と、補正部材の位置を検出する位置検出部と、振れ検出部と位置検出部の検出結果に応じて補正部材の補正量を演算する演算部と、光学機器の姿勢を検知する姿勢検知部と、姿勢検知部に用いる信号を補正する信号補正部とを有し、演算部は、検出部の検出結果に対して比例制御と積分制御と微分制御とを実行することで補正量を演算し、姿勢検知部は、積分制御にて抽出された積分制御にて得られる信号を用いて光学機器の姿勢を検知し、信号補正部は、補正量の大きさに基づいて抽出された積分制御にて得られる信号を補正する。
(もっと読む)
電子カメラ、通信システム
【課題】 本発明は、ライフログ情報のデータ量を抑制して、そのライフログ情報を他者と共有できる手段を提供する。
【解決手段】 電子カメラは、撮像素子、音声入力部、記録処理部、位置情報取得部、追跡部、判定部及び通信部を備える。撮像素子は、被写体像を撮像し、画像を生成する。音声入力部は、音声を入力する。記録処理部は、画像のデータと音声のデータとをメモリに記録する。位置情報取得部は、ユーザの現在位置を示す位置情報を外部から取得する。追跡部は、位置情報に基づいて、ユーザの移動経路を電子地図上で追跡する。判定部は、追跡部の追跡結果に応じて、現在位置が電子地図上で注目位置に該当するか否かを判定する。通信部は、判定部により現在位置が注目位置に該当すると判定された場合、その注目位置において、メモリに記録された画像のデータと音声のデータとの少なくとも何れか一方を他の通信端末に送信する。
(もっと読む)
デジタルカメラ
【課題】視界内のランドマークを操作者に正確に認識させることができるデジタルカメラを提供する。
【解決手段】撮影部32と、自己位置を測位する測位部10と、前記撮影部における撮影方位を計測する方位計測部14と、前記自己位置の高度を計測する高度計測部16と、前記撮影部における撮影方向の水平面に対する傾斜角度を計測する姿勢情報取得部18と、複数のランドマーク情報を記憶するランドマーク情報記憶部42と、前記撮影時における自己位置、撮影方位、高度、及び傾斜角度に基づいて、前記撮影時における自己位置を基準として撮影方位の方向に操作者が視認できるランドマーク情報を抽出する抽出部8と、前記撮影部において撮影された画像データのタグ情報として、前記撮影時における自己位置に関する情報、撮影方位に関する情報、高度に関する情報、姿勢情報、及び前記ランドマーク情報の中の少なくとも一つを記憶させる記憶制御部8とを備える。
(もっと読む)
電子機器及び表示方法
【課題】電子機器を保持する手が表示画面を覆っている場合であっても、電子機器の姿勢によらずに画像全体が見えるように表示する。
【解決手段】電子機器は、画像を表示する表示部と、前記表示部の表示領域に対する接触の有無及び接触位置を検知する検知部と、前記表示領域において、前記検知部により接触が検知されていない領域に前記画像を当該領域に合わせた大きさで表示させる制御部と、自装置の姿勢を検知する姿勢検知部と、を備え、前記制御部は、前記姿勢検知部により検知された姿勢に基づき、前記画像の表示方向を決定する。
(もっと読む)
電子機器
【課題】表示装置(又は表示制御部)の機能及び能力に係る制約を意識せずに、被写体の天地方向のずれを補正した撮像画像を表示する。
【解決手段】制御装置1は、被写体を撮像する撮像部10と、撮像時の重力方向を検出するセンサ20と、撮像部10が出力する撮像データから画像を生成する画像生成部40とを備える。画像生成部40は、撮像時の重力方向に基づいて被写体の天地方向を補正した画像を生成する。
(もっと読む)
手持ち式電子装置、それに適用される二重像取得方法及びそれにロードされるコンピュータプログラム製品
【課題】第1のレンズモジュール、第2のレンズモジュール、入力ユニット、制御ユニットを含む手持ち式電子装置を提供する。
【解決手段】第1のレンズモジュールと第2のレンズモジュールは、それぞれ手持ち式電子装置に設けられる。第1のレンズモジュールは、第1の画像取得範囲を有し、第2のレンズモジュールは、第1の画像取得範囲と異なる第2の画像取得範囲を有する。入力ユニットは、画像を取得するユーザーによる入力を受信する。入力ユニットがユーザーによる入力を受信すると、制御ユニットは、第1のレンズモジュールと第2のレンズモジュールを制御して、同時にそれぞれ第1の画像と第2の画像を取得させる。
(もっと読む)
カメラ、カメラ制御プログラム及び撮影方法
【課題】撮影条件が自動設定される確率を高め、かつ人物以外を主要被写体として撮影条件を自動設定することを可能にする。
【解決手段】被写体検索モードが設定されている場合には、ライブビュー画像を取得する(ステップS204)。現在の位置、レンズ方向に対応して被写体データ管理テーブルから被写体特徴を抽出する(ステップS205)。この抽出した被写体特徴情報に合致する被写体部分をライブビュー画像内より検索する(ステップS206)。そして、ライブビュー画像内に特徴情報と合致した被写体部分が存在する否かを判断する(ステップS207)。ライブビュー画像内に特徴情報と合致した被写体部分が存在する場合には、合致した被写体部分をメイン被写体として、AF、AE、画角調整等を実行する(ステップS208)。
(もっと読む)
2眼撮像装置、その制御方法、および、制御プログラムおよびコンピュータ読み取り可能な記録媒体
【課題】上下または左右の区別がある立体画像の撮像時に、端末の姿勢を標識の画面表示によりユーザに認識させる。
【解決手段】自装置の姿勢が、主撮像部11および副撮像部12による右眼画像および左眼画像の撮像ができる“ホーム”姿勢であるか否かを検知する姿勢検知部13と、向きを判別可能な標識の画面表示を行う標識描画部46と、姿勢検知部13が検知する姿勢に応じて、標識描画部46が画面表示における標識の表示の向きを変更する2D撮影モードと、標識描画部46が画面表示における標識の表示の向きを、“ホーム”姿勢において表示する向きに維持する3D撮影モードとを切り替える撮影モード切替制御部45とを備え、撮影モード切替制御部45は、主撮像部11および副撮像部12による上記右眼画像および上記左眼画像の撮像を行う際に、3D撮影モードに切り替える。
(もっと読む)
撮像装置
【課題】 本発明では撮影機器の移動に伴う不安定を排除し、安定した撮影動作が行える撮影装置を実現する。
【解決手段】 本発明の撮像装置は、撮影手段と、本体部が揺動可能な第1の状態と揺動することなく直立状態である第2の状態とを遷移可能な底部を有する本体部とを有する撮像装置であって、撮影手段と前記本体部を連結する撮影支持部と、第1の状態において、本体部の揺れを相殺するように撮影支持部を揺動させると共に、本体部の揺れ角に対する撮影支持部の揺れ角の割合を、本体部の揺れ角に応じて変更する揺れ角制御手段とを有することを特徴とする。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像素子の一部に焦点検出用画素を配して位相差方式の焦点検出を行う撮像装置において、フォーカス時のハンチング現象を防止しつつ、合焦時のレンズ駆動回数を低減する。
【解決手段】フォーカスレンズを含む撮影光学系を備えたレンズユニットを着脱可能な撮像装置であって、撮影光学系の射出瞳を通過した光束を受光する撮像用画素と撮影光学系の射出瞳の一部が遮光された光束を受光する焦点検出用画素とが配列された撮像素子と、焦点検出用画素の出力信号の位相差に基づいてフォーカスレンズの合焦位置からのずれ量を検出する焦点検出部と、撮影光学系の光線のケラレ情報を取得する取得部と、を備え、焦点検出部は、フォーカスレンズの位置検出分解能がフォーカスレンズの駆動分解能より低い場合、レンズユニットからの情報に基づいて特定される所定のフォーカスレンズの位置での光線のケラレ情報を用いて、フォーカスレンズの合焦位置からのずれ量を検出する。
(もっと読む)
61 - 80 / 907
[ Back to top ]