
Fターム[5D096AA02]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 第1実施例の記録担体 (432) | ディスク (424) | 磁気ディスク (408)
Fターム[5D096AA02]の下位に属するFターム
ディスクスタック (15)
フレキシブルディスク、FD、回転シート
Fターム[5D096AA02]に分類される特許
281 - 300 / 393
磁気ヘッドテスト装置およびその駆動方法
【課題】ヘッドが偏心したトラックをたどることに関係したトラック追従ずれを最小化することによって磁気ヘッドテスト装置におけるサーボ精度を改善する方法を提供する。
【解決手段】高いサーボ制御周波数帯域幅で装置を駆動させている間に生成されたPESから、サーボ制御周波数帯域幅を限定して動作させて先に計算された1または複数のサーボセクタの位置の平均オフセット値を減じることにより補正されたPESを生成する。これにより、一の装置で書き込んだディスクを他の装置へ移動させることに関連して生じるRRO問題をなくすることができる。
(もっと読む)
サーボ書き込み方法及びディスクドライブ

【課題】サーボ書き込み時間の短縮化を図ると共に、ディスク媒体上には同心円状のサーボ情報を確実に記録することができるサーボ書き込み方法を提供することにある。
【解決手段】ディスクドライブに使用されるディスク媒体上にサーボ情報を書き込むためのサーボ書き込み方法が開示されている。サーボ書き込み方法の手順としては、例えばクリーンルーム内でディスク媒体上に螺旋状の第1のサーボ情報を書き込み、次にディスクドライブ内で当該ディスク媒体上に同心円状の第2のサーボ情報を書き込む。
(もっと読む)
データの記録再生方法及び磁気ディスク装置の製造方法
【課題】 ロード/アンロード領域で安全にシーク動作を行いながらディスクの傷を検査する。
【解決手段】 ロード/アンロード領域には、最外周シリンダ[Max]104までサーボ・データが書き込まれている。最外周シリンダ[Max]に対して内周側に隣接する限界領域を設定する。限界領域に含まれる各サーボ・データを使用すると、ヘッド/スライダの位置制御は可能だが、データの記録および再生をすることはできない。再生ヘッド35が限界領域に位置づけられたときの記録ヘッド37の位置は、最外周シリンダ[Max]の内側になる。限界領域が存在するので試験データを内周側から外周側に記録してゆくとき、試験データが最外周シリンダ[Max]より外側に書き込まれることはない。したがって、傷の検査のために試験データを再生するときに再生ヘッドが最外周シリンダ[Max]より外側に位置づけられることはないのでヘッド支持機構が暴走することはない。
(もっと読む)
ディスク装置
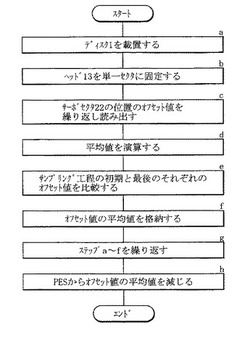
【課題】 シングル・ライト方式を採用した場合の、磁気ヘッド位置の上記オフセットを、簡便な処理により決定でき、かつその精度を向上できるディスク装置を提供する。
【解決手段】 隣接する円周内側または外側のデータトラックによって一部が上書きされて形成されたデータトラックを有する記録媒体、記録媒体に対して情報を書込む記録ヘッドと記録媒体から情報を読み出す再生ヘッドとを備えるヘッドアセンブリ、及びヘッドアセンブリの記録媒体に対する位置を制御する制御デバイスと、を含み、記録媒体上に、互いに位相の異なる位置誤差検出信号が、トラック幅方向にトラックピッチだけずれて、トラック方向に繰り返し記録され、制御デバイスは、再生ヘッドにて読み取られたバースト信号に基づいて、ヘットアセンブリの位置制御を行うディスク装置である。
(もっと読む)
メディアにパターンを書き込む方法及びデータ記憶装置
【課題】
磁気ディスクへのパターン自己書き込みにおいて、その回転ジッタの影響を抑制し、より正確なタイミングでパターンを書き込む。
【解決手段】
本発明の一例において、内周側トラックに、Nセクタの各パターンをデフォルト・クロック周波数、デフォルト・クロック数(各パターン間の書き込み間隔クロック数)で基準パターンを書き込む。その後、各基準パターンを複数回読み出してその間隔を測定し、各セクタ間の間隔の平均値を決定する。この値を使用して、外周側に等間隔の新たなパターンを書き込むときの、各セクタにおけるターゲット値を算出する。次に、内周側トラックの各基準パターンを読み出しながら、外周側に新しいパターンを書き込む。各外周側パターンは、内周側トラックの各基準パターンを検出したタイミングから、変調されたクロック周波数で、セクタ毎に算出された遅延時間後に書き込む。
(もっと読む)
磁気サーボ位置復調器、磁気媒体で基準マークを判断する方法、基準マークを検出するための装置、および磁気媒体で基準マークを検出する方法
【課題】磁気データ記憶媒体で基準マークを検出するための装置および方法を提供する。
【解決手段】1つの変形例では、この装置は、パーシャルレスポンス/最大尤度(PRML)技術を利用して磁気データ記憶媒体から情報を抽出するように動作可能な磁気サーボ位置復調器を含む。PRMLチャネル内に格納された同期マークは次いで、デジタルフィルタを利用して検出される。検出された同期マークの各々について、同期マークのさらなる正確な位置が数学的予測モデルを利用して判断され得る。
(もっと読む)
マスター体、マスター体の生産方法および磁気記録媒体
【課題】マスター体からスレーブ体に斜線パターンを複製する際の斜線パターンの精度劣化を防ぐこと。
【解決手段】斜線パターン境界部10の隙間を特殊パターンで埋める。特殊パターンとしては、垂直線30を用いる。なお、斜線20を斜線パターン境界部10の中央まで延長する、斜線20を斜線パターン境界部10の中央を越えて対向する斜線20と接する直前まで延長する、あるいは、斜線20を斜線パターン境界部10の中央まで延長した後に隣接する斜線20と接する直前まで短垂線で延長する、などによって特殊パターンを形成することもできる。
(もっと読む)
磁気記録媒体、磁気転写方法、及び磁気再生方法
【課題】磁気転写を行う際のサブパルスの影響を除去でき、高密度記録に対応した磁気記録媒体、磁気転写方法、及び磁気再生方法を提供する。
【解決手段】複数個の磁性層パターンと、この磁性層パターン同士の間に設けられた非磁性層パターンとが交互に表面に形成され、これにより磁気情報が記録された円盤状体の磁気記録媒体である。磁性層パターン及び/又は非磁性層パターンの円周方向長さの最小値がbであり、所定の磁性層パターン及び/又は非磁性層パターンの円周方向長さがbより大きく、かつ磁気ヘッドにより読み取った際に読み取りエラーとなるサブパルスPSを発生させる円周方向長さである場合に、所定の磁性層パターン及び/又は非磁性層パターンの位置情報が磁気情報として記録されている。
(もっと読む)
磁気記録再生装置
【課題】 プロセス上での製造負担の極めて少ないバーストパターン形状であって、なおかつ正確な位置誤差信号を得ることができ、さらには正確な位置誤差信号を得ることができる実用範囲を拡大させることができ、装置設計における許容範囲を広げることが可能となるバーストパターン形状を有する磁気記録媒体を用いた磁気記録再生装置を提供する。
【解決手段】 バーストパターンを3対に増やし、かつ、ディスクリートメディアにおけるバーストパターン形状を、トラック幅方向およびトラック円周方向にそれぞれ実質的な台形形状を有する形状(四角錐台形状)とし、トラック幅方向の台形形状において凸状磁気記録層の表面に対応する上辺をW1、凸状磁気記録層の下面に対応する下辺をW2、データ情報記録部のデータトラックピッチをTp、磁気ヘッドの読み出し幅をWrとしたときに所定の関係を満たすように構成する。
(もっと読む)
磁気記録再生装置
【課題】 プロセス上での製造負担の極めて少ないバーストパターン形状であって、なおかつ正確な位置誤差信号を得ることができるバーストパターン形状を有する磁気記録媒体を用いた磁気記録再生装置を提供する。
【解決手段】 ディスクリートメディアにおけるバーストパターン形状を、トラック幅方向およびトラック円周方向にそれぞれ実質的な台形形状を有する形状(四角錐台形状)とし、トラック幅方向の台形形状において凸状磁気記録層の表面に対応する上辺をW1、凸状磁気記録層の下面に対応する下辺をW2、データ情報記録部のデータトラックピッチをTp、磁気ヘッドの読み出し幅をWrとしたときに所定の関係を満たすように構成する。
(もっと読む)
外乱補償方法、状態制御装置、トラック追従制御装置、ハードディスクドライブ、記録媒体
【課題】プラントに印加される外乱をより効果的に補償できる外乱補償方法を提供する。
【解決手段】プラント308の推定された状態を示す状態信号(y)に応じて、第1制御信号(Ue(k))を発生させる推定器及び制御器310を有する状態制御装置によって制御されるプラント308に作用する外乱を補償する外乱補償方法が提供される。この方オフでは、所定の利得/周波数特性を有する伝達関数H(s)を第1制御信号(Ue(k))から誘導された制御信号に適用することによって、第2制御信号(U(k))を発生させる過程と、第2制御信号(Ul(k))と、第1制御信号から誘導された制御信号とに応じて、全体制御信号(U(k))を発生し、全体制御信号をプラント308に印加する過程と、を含む。
(もっと読む)
RRO算出方法、RRO補償値の算出方法、及び記録媒体
【課題】RRO算出方法、RRO補償値の算出方法、及び記録媒体を提供すること。
【解決手段】トラックを有するディスクに作用する反復的な外乱であるRROを算出する方法において、ヘッドが目標トラックを追従する間に、目標トラックでサンプリングされた位置エラー信号(PES)を周波数領域で分析して、RROを示す周波数係数の第1セットを算出する過程と、周波数係数の第1セットに基づいて前記RROを算出する過程と、を含むことを特徴とする。
(もっと読む)
磁気記録装置
【課題】高トラックピッチで作製した基板加工型のパターンド媒体を備え、サーボ信号のSNの劣化を抑え、トラッキング動作を良好に行える磁気記録装置を提供する。
【解決手段】サーボ部に相当する凹凸パターンおよびデータ部に相当する凹凸パターンが形成された基板および前記基板上に堆積された磁性薄膜を有する磁気記録媒体と、一対の磁気シールドおよびこれらの間に挟まれたGMR素子を含む記録再生ヘッドとを具備し、磁気記録媒体のデータ部のトラックピッチが20nm以上300nm以下であり、記録再生ヘッドと磁気記録媒体との相対線速度が11m/s以下であり、記録再生ヘッドの磁気シールドから磁気記録媒体の凸部に堆積されている磁性薄膜までの距離をm、磁気記録媒体のサーボ部において凸部に堆積されている磁性薄膜と凹部に堆積されている磁性薄膜との距離をdとしたときd/mが0.2以上3以下である磁気記録装置。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】ディスク装置に加わる外乱によるヘッドの位置ずれを、制御系で補正する位置制御装置において、未知の外乱周波数に適応制御する。
【解決手段】位置誤差を基準とした信号から適応則により、外部振動周波数を推定する周波数推定ブロック(24)と、この外部振動周波数を用いて、逐次、補償器(23)の定数を修正する修正テーブル(24)を設ける。このため、逐次、補償器(23)の定数が、推定角周波数に応じて修正されるため、広い範囲の外部振動周波数に対して、精度の高い追従制御が可能になる。
(もっと読む)
制御方法、制御回路及び記憶装置
【課題】本発明は、制御方法、制御回路及び記憶装置に関し、制御系の位相余裕を確保することを目的とする。
【解決手段】記録媒体に記録されたサーボ情報を再生するヘッドの制御方法において、再生されたサーボ情報から求めた記録媒体上のヘッドの実位置からヘッドの推定位置を減算して予測誤差を求め、入力された予測値を加算してヘッドを駆動する電流値を計算する制御系に対して第1のフィードバックを行い、予測誤差に所定の乗算係数を乗算する乗算器を介するのみで制御系に対して第2のフィードバックを行い、第1及び第2のフィードバックの出力値を加算するように構成する。
(もっと読む)
磁気ヘッド位置検出機能付きディスク特性評価装置
【課題】 磁気ヘッドのコア部に極力近い位置を直接センスし、その位置情報をフィードバック制御することで、位置決め精度を向上する磁気ディスク特性評価装置。
【解決手段】 磁気ディスク12の周囲に、磁気ヘッド1を先端に備えたヘッドクランプ18をヘッドロード機構に設けた粗動ステージ14を搭載したステージを有する磁気ヘッドディスク特性評価装置において、ヘッドクランプ18の磁気ヘッド1を保持するピエゾステージと、ヘッドクランプ18の上に照射面を向けたレーザヘッド17と、ピエゾステージの取り付け面の裏面に一定間隔の遮光縞を被膜に蒸着して形成した反射型スケール22とをヘッドクランプ18に備える。そして、反射型スケール22からの反射光から磁気ヘッド1の磁気ディスク上の位置を検出し、該検出値と基準トラック位置との誤差信号でヘッドクランプ18を制御する。
(もっと読む)
データ記憶装置、パラメータ決定方法及びそのヘッドの位置制御信号値を決定する方法
【課題】
トラック・ピッチに相当するDACOUT値を正確に算出する。
【解決手段】
本発明の一例において、連側して配置された3つのバースト・パターンのそれぞれについてDACOUT値に対する読み出し振幅値の関係を示すプロファイルを得る。プロファイルから、クラスタを切り出す。クラスタは、DACOUTの関数として各プロファイルを見たとき、ある一定の閾値Athより大きい値が連続している部分である。クラスタ[j]、が並んでいる。クラスタ[j−1]とクラスタ[j+1]重なりを計算する。その重なり値とその目標値との間の差分と、クラスタ[j]の傾き値Slope_L[j]、Slope_R[j]とを使用して、トラック・ピッチに相当するDACOUT値を算出する。
(もっと読む)
磁気記録媒体、磁気記録再生装置、スタンパ、スタンパの製造方法及び磁気記録媒体の製造方法
【課題】記録層が凹凸パターンで形成された生産効率が良い磁気記録媒体、該磁気記録媒体を備える磁気記録再生装置、該磁気記録媒体を製造するためのスタンパ、該スタンパの製造方法及び磁気記録媒体の製造方法を提供する。
【解決手段】記録層22はサーボ領域の部分の一部が、0及び1の情報のいずれか一方を記録するための升目状の領域が凹部を構成する凹部単位領域CUであり他方の情報を記録するための升目状の領域が凸部を構成する凸部単位領域PUである基本的サーボ凹凸パターンに対して該基本的サーボ凹凸パターンの凹部及び凸部のいずれか一方の少なくとも一部を径方向Drに分割してなる変則的サーボ凹凸パターンで形成されている。
(もっと読む)
ハードディスクドライブのバイアス力の補償方法と,それに適したバイアス力プロファイルの作成方法,記録媒体,ハードディスクドライブ,およびコンピュータ
【課題】ハードディスクドライブのバイアス補償方法と,それに適したバイアス力プロファイルの作成方法,記録媒体,およびハードディスクドライブを提供すること。
【解決手段】ハードディスクドライブ10の磁気ヘッド16に印加されるバイアス力を補償するバイアスの補償方法において,ヘッド16の現在位置でのバイアス力を測定する過程と,複数のバイアス力プロファイルのうちヘッド16の現在位置で測定されたバイアス力と類似したバイアス力を有するバイアス力プロファイルを選択する過程と,選択されたバイアス力プロファイルによってバイアス力を補償する過程と,を含むことを特徴とするバイアスの補償方法を提供する。
(もっと読む)
記録ディスクへのパターン書き込み方法及びデータ記憶装置
【課題】SSWにおける誤差伝播防止のためのサーボ補正を効率的に行う。
【解決手段】サーボ位置信号生成部231は、サーボ・チャネル211からのサーボ信号に基づいて、リード素子の現在位置を示すサーボ位置信号を生成する。ターゲット位置設定部232は、リード素子がフォロしているトラック書き込み時のPESと予め登録されている補正係数との積和演算により補正値を生成する。この補正値と基準ターゲット位置とから補正ターゲット位置を生成し、位置誤差量算出部233に出力する。位置誤差量算出部233は、サーボ位置信号とターゲット位置信号とから位置誤差信号(PES)を生成し、サーボ・コントローラ234に出力する。サーボ・コントローラ234は、PESに従って制御信号(DACOUT)を生成し、モータ・ドライバ・ユニット22はその制御信号に従って所定値の電流をVCM15に供給する。
(もっと読む)
281 - 300 / 393
[ Back to top ]