
Fターム[5D096HH18]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 発明、考案の特徴 (182) | フィードフォワード制御、模擬回路の使用 (61)
Fターム[5D096HH18]に分類される特許
1 - 20 / 61
磁気ディスク装置およびヘッドの位置制御方法
【課題】フィードバック制御において、所定周波数の外乱を抑圧する適応フィルタを容易に構成すること。
【解決手段】 磁気ディスク装置は、サーボ情報が記録される磁気ディスクと、磁気ディスクのサーボ情報を読み出すためのヘッドと、位置制御手段とを具備する。位置制御手段は、前記ヘッドの位置決め制御を行う際に、ヘッドにより読み出したサーボ情報から生成される位置誤差情報に基づいて、可変係数を含む高次のIIR型デジタルフィルタを用いて位置決め制御における外乱となる所定周波数を推定する。
(もっと読む)
マイクロアクチュエータを備えた磁気ディスク装置

【課題】マイクロアクチュエータのヒステリシス特性に適合したシーク動作を実現する。
【解決手段】磁気ディスク装置のサーボコントローラは、マイクロアクチュエータ(MA)推定器とVCMアクチュエータ(VCMA)コントローラとフィルタと加算器とを具備する。MA推定器は、マイクロアクチュエータ(MA)に与えられるべき操作量からMAの第1の変位を推定する。VCMAコントローラは、目標トラックとヘッドの位置及び推定された第1の変位から推定されるVCMアクチュエータ(VCMA)の位置との間の位置誤差に基づいて、VCMAを制御する。フィルタは、所定のシーク動作におけるVCMAの状態から、MAのヒステリシスによるMAの変位の遅れに対応するVCMAの位置を推定し、推定された位置からMAの前記遅れの変位である第2の変位を推定する。加算器は、推定された第2の変位をMAの入力に加算する
(もっと読む)
磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法
【課題】マイクロアクチュエータに適した外乱フィードフォワードを実現する。
【解決手段】磁気ディスク装置は検出器とサーボコントローラ22とを備える。検出器は、ディスクに所定間隔で記録されているサーボ同期マークがヘッドにより読み出される時間間隔を実タイムスタンプとして検出する。サーボコントローラのフィードフォワードコントローラ40は、差分検出器401と積分器403とを具備する。差分検出器は、実タイムスタンプの目標タイムスタンプからのずれを検出する。積分器は、検出されたずれを積分することによって、検出されたずれをマイクロアクチュエータ15の変位に変換する。フィードフォワードコントローラは、変換された変位に対応する操作量をフィードフォワード操作量として、マイクロアクチュエータのための制御ループに与える。
(もっと読む)
データトラックにアクセスする際に補正情報を適用する磁気ディスク装置
【課題】通常の利用形態ではアクセス効率が悪いデータトラックに効率的にアクセスできるようにする。
【解決手段】CPU22は、HDD10内のディスク11上の利用可能なデータトラックにアクセスすることにより、所定の判定基準を満たすかを検出する。CPU22は、所定のデータトラックが、所定の判定基準を満たさない場合に、当該所定の判定基準で利用するための補正情報を取得する。CPU22は、取得された補正情報を所定のデータトラックに対応付けてFROM23の領域231に格納する。CPU22は、補正情報に基づいて所定のデータトラックへのアクセスを制御する。
(もっと読む)
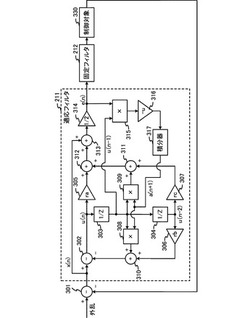
ディスク・ドライブ及びヘッド位置決め制御方法
【課題】センサ出力を使用したヘッド移動機構のフィードフォワード制御において、制御システムの安定性と適応フィルタの収束性とを両立させる。
【解決手段】本形態のHDD1は、外部振動に応じて、ショック・センサ・フィードフォワード(SSFF)制御におけるフィルタの適応化を行う。適応化処理部APは、ショック・センサQの出力と位置誤差信号(PES)とを参照して、SSFFフィルタFのフィルタ係数を更新する。各フィルタ係数の更新において、その更新量はステップ・サイズ・パラメータによって決まる。適応化処理部は、このステップ・サイズ・パラメータを外部振動の大きさに従って変化させる。具体的には、ショック・センサ出力あるいはフィードフォワード出力を入力とする関数フィルタ出力の絶対値を使用する。
(もっと読む)
周回メモリ、及びディスク装置
【課題】メモリに記憶された情報と被補償信号に大きな差が生じた場合でも、不要な学習を回避でき、目標値の追従性能を損なわない周回メモリ、及び該周回メモリを備えるディスク装置を提供する。
【解決手段】入力される被補償信号の1周期分を記憶するメモリ15を0クリアするメモリリセット部19を備え、コントローラ20を介してディスク装置の状態に応じてメモリ15に記憶された信号情報のリセットを自在に行えるようにした。
(もっと読む)
磁気ディスク装置、磁気ディスク再生方法およびプログラム
【課題】書込時と読取時のヘッドの位置ずれ量を低減することができる磁気ディスク装置を提供すること。
【解決手段】磁気ディスクのトラックにデータを磁気的に書き込む書込部の、データ書込時におけるトラック幅方向の位置を示す位置情報を記憶する位置情報記憶部と、磁気ディスクの再生対象のトラックである再生対象トラックを読み取る読取部と、位置情報記憶部が記憶している位置情報が示す位置に基づいて、読み取り時における読取部の、再生対象トラックのトラック幅方向の位置を制御する位置制御部とを備える。
(もっと読む)
情報記録再生装置、制御装置および情報記録再生方法
【課題】トラックピッチの変動を原因とした読出しエラーを防止するとともに、あるトラックに書き込まれるべきデータが隣接するトラックに上書きされてしまう危険性を低減することを課題とする。
【解決手段】位置決め制御部152は、ディスク120からデータを読み取る際に、ディスク120のトラックピッチ変動を原因として、いわゆるコアずれ補正量に生じる補正誤差を加味し、ヘッドの位置決めを制御する。位置決め制御部152は、トラックピッチ変動を加味しない場合のコアずれ補正量dに、補正誤差Δdを足し合わせた値dr=「d+Δd」を求めることで、トラックピッチ変動を加味した時のコアずれ補正量を算出する。
(もっと読む)
磁気ハードディスクドライブおよびその運転方法
【課題】 実行処理の高速化と記憶スペースの削減とを図りつつ、HDDにおけるRROの影響を最小限にする。
【解決手段】 トランスデューサ13からの位置信号75は、基準位置信号70と加算(引算)され、位置エラー信号(PES)80が得られる。PES80は、現サーボウェッジにおける現補正の実行のために制御部60に入力されると共に、フィードフォワードアルゴリズム部50にも入力される。フィードフォワードアルゴリズム部50は、RROのみに起因するトランスデューサ位置ずれ分を示すフィードフォワード値を反復合算により算出し、その結果を、その次のサーボウェッジ用のフィードフォワードRRO補正項として出力する。このフィードフォワードRRO補正項は、制御部60から出力される補償出力と加算され、その加算結果100が、制御信号としてプラント200のボイスコイルモータに供給される。
(もっと読む)
ディスク装置、ヘッド位置制御装置およびヘッド位置制御方法
【課題】外乱抑圧機能を持つオブザーバ制御による位置決め制御装置において、オブザーバの制御特性を損なうことなく、外乱抑圧機能を付加する。
【解決手段】アクチュエータのモデル(34〜44)と外乱のモデル(50)を分離し、外乱モデル(50)は、感度関数を整形する分母と分子の次数が同一のフィルタの前記分子を分母とした伝達関数で定義された外乱モデルから求めた推定ゲインを用いて、状態情報を生成し、前記状態情報から前記アクチュエータ(1)の外乱抑圧値を演算する。外乱モデルは、推定位置誤差に従い、抑圧すべき複数の外乱周波数に応じた複数の整形フィルタの分子を分母とした伝達関数で定義された複数のモデルの外乱の推定ゲインを用いて、状態情報を生成し、状態情報からアクチュエータの複数の外乱抑圧値を演算し、複数の外乱抑圧値を加算する。
(もっと読む)
情報記憶装置およびサーボ制御用フィルタ学習プログラム
【課題】ホスト側への応答が遅くならないように性能に対する影響を考慮しつつ、ヘッドの位置決め制御性能に対する振動の影響を抑制するために最適なサーボ制御用フィルタへの切替を実現することを課題とする。
【解決手段】ハードディスク装置は、記録再生エラー発生時に、位置誤差信号を各サーボ制御用フィルタを通して得た制御電流を用いて位置決め制御を行ったときの記録再生ヘッドの現在位置から振動量を算出する学習を、所定時間、複数のサーボ制御用フィルタのそれぞれに対して順番に行い、測定した振動量が最小のサーボ制御用フィルタに位置誤差信号を通して得た制御電流を用いて、記録再生ヘッドの位置決め制御を行う。
(もっと読む)
RPTCによるRRO補償を行う磁気ディスク装置の制御装置および制御方法
【課題】トラック移動を伴うような場合においても、フォロイングの精度を劣化させることなく、学習回数を大幅に少なく追従することを可能とする磁気ディスク装置の制御装置および制御方法を提供することを目的とする。
【解決手段】マルチレートフィードフォワード制御を行う完全追従制御器と、出力信号からRRO成分を学習し、目標軌道補償信号を生成する周期信号発生器とを備えるRPTC法によるRRO補償を行う磁気ディスク装置の制御装置において、周期信号発生器は、隣接トラック及び同一トラックにおいて再学習を行う再学習手段を備えることを特徴とする磁気ディスク装置の制御装置。
(もっと読む)
磁気ヘッドの位置決め方法および装置
【課題】複数のバーストパターンから読み出されるバースト信号の振幅に基づいて磁気ヘッドの位置決めを行う際に、各バーストパターンの位置ずれの影響を低減することが可能な、磁気ヘッドの位置決め方法および装置を提供する。
【解決手段】本発明の磁気ヘッドの位置決め装置は、磁気ヘッドにより複数のバーストパターンから読み出される各バースト信号の振幅を補正する手段50と、補正後の複数のバースト信号の振幅に基づいて、軌道に対する磁気ヘッドの偏差を算出する手段60と、磁気ヘッドの偏差に基づいて、軌道に磁気ヘッドを位置決めする手段70と、を備える。
(もっと読む)
同期成分圧縮制御の切替えエリア最適化方法、磁気ディスク装置
【課題】同期成分圧縮制御の切替えエリア数が固定の場合に、DCオフセット電流値に基づいて、同一エリア内の全トラック間での補正誤差を低減する、同期成分圧縮制御の切替えエリア最適化方法および磁気ディスク装置を得る。
【解決手段】同期成分圧縮制御の切替えエリア最適化方法は、ディスク回転に同期した位置誤差成分を補正する同期成分圧縮制御の切替えエリア最適化方法であって、DCオフセット電流値に基づき、エリア数が固定されている同期成分圧縮制御の切替えエリアを設定するステップを具備する。
(もっと読む)
磁気記憶装置及びヘッドの位置決め方法
【課題】ディスクフラッタのみの周波数成分を取得し、取得されたディスクフラッタの周波数成分に基づいて、精度良くヘッドの位置決め制御を実行する。
【解決手段】磁気記憶装置が備えるセンサ100が、ディスクフラッタとアーム曲げ振動とを含む第1の信号を検出し、センサ101が、アーム曲げ振動のみを含む第2の信号を検出する。磁気記憶装置が、上記検出された第1の信号と第2の信号とに基づいてディスクフラッタの周波数成分を取得し、取得されたディスクフラッタの周波数成分に基づいて、ヘッドの位置決め制御を実行する。
(もっと読む)
磁気記録のための磁気抵抗型読出しヘッドの滑動モード制御
【課題】MR読出しヘッドに関連する非線形のゲイン変動を補償し得る低コストでより効率的な磁気ディスクサーボ制御システムの提供。
【解決手段】位置誤差X149は、スイッチ46の状態に依存して正のゲイン47または負のゲイン48によって乗算され、加速コマンドU53が被制御システム44への入力として生成される。積分器54の出力は被制御システムの速度であり、これはまた位置誤差速度の負の値−X255でもある。スイッチ46が正のゲイン47を選択するときは、これは負のフィードバックシステムであり、スイッチ46が負のゲイン48を選択するときは、これは正のフィードバックシステムである。これらの構造のそれぞれではシステムは不安定である。しかし、2つの構造の間で繰り返し切り替えを行うことによってシステムは安定にされ得る。
(もっと読む)
ディスク・ドライブ装置及びそのサーボ制御方法
【課題】振動センサを有するディスク・ドライブ装置において、検出した振動に応じた適切なサーボ制御を行う。
【解決手段】本発明一実施形態において、HDDは、ヘッド・ポジショニングの振動補正を行う補正サーボ・モードと、振動補正を行わない通常サーボ・モードとを切り換える。HDDは、いずれかのサーボ・モードにおいてサーボ・ポジショニングを行い、測定した位置誤差信号からそのサーボ・モードにおけるサーボ・ポジショニングの精度を決定する。HDDは、他方のサーボ・モードのサーボ・ポジショニング精度を表すデータをテーブルから取得する。HDDは2つのサーボ・モードの精度を比較し、精度がより高いサーボ・モードを選択する。テーブルは、各サーボ・モードにおけるサーボ・ポジショニング精度の過去の測定結果を格納している。
(もっと読む)
磁気ディスク装置における磁気ヘッドの位置決め制御のためのフィードフォワード制御回路の設計方法、同設計方法により設計されたフィードフォワード制御回路を有する磁気ディスク装置及び同設計方法により設計されたフィードフォワード制御回路
【課題】ディスクフラッタの影響を効果的に低減可能な磁気ディスク装置における磁気ヘッドの位置決め制御が可能な構成を提供することを目的とする。
【解決手段】磁気ディスクを回転させた状態で当該磁気ディスクの振動を測定し、振動のスペクトラムから磁気ディスクフラッタによる振動の周波数であるフラッタ周波数を求め、フラッタ周波数の各々に対しゲインのピークを有する、フラッタ周波数毎のフィルタを設計し、フラッタ周波数毎のフィルタを合成することにより前記磁気ヘッドの位置決め制御のためのフィードフォワード制御回路を得る構成とした。
(もっと読む)
ディスクリートトラックメディアの偏芯検出方法
【課題】DTMにおいて、サーボパターンを参照することなくトラックの、特に高次の偏芯量及び偏芯方向を検出できるトラック偏芯検出方法を得る。
【解決手段】DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、上記磁気ヘッドを複数の振幅、位相による偏芯軌道で移動させながら上記所定領域に書き込んだデータを読み出して複数のエンベロープデータを取得し、上記取得した複数のエンベロープデータ波形の滑らかさを判定して次段階で偏芯検出が可能な1次偏芯追従軌道を探索する段階と、上記1次偏芯追従軌道に基づき1次偏芯に追従させた状態で上記磁気ヘッド位置を半径方向に段階的に移動させながら上記所定領域からデータを読み出して多相エンベロープデータを取得し、該取得した多相エンベロープデータから各セクターのトラック小数値を演算し、それらをセクター毎に順次接続して偏芯形状を再構成する段階とを含む。
(もっと読む)
ディスクドライブ装置,ディスクドライブシステム、及びコンピュータ可読媒体
【課題】安定した読み取り/書き込みを行うことができ、繰り返しランアウトをキャンセルするディスクドライブ装置、ディスクドライブシステム及びディスクドライブの駆動方法を提供する。
【解決手段】周期的な繰り返しランアウト信号をキャンセルするキャンセル信号を生成するため、インパルス応答を有する線形システムがキャンセル信号を受信して位置誤差信号を出力し、逆行列モジュールが位置誤差信号に逆行列を乗算して中間キャンセル信号を出力し、インパルス積分モジュールが、1つ以上の所定の期間における中間キャンセル信号の少なくとも1つのサンプルを積分し、キャンセル信号を出力する。
(もっと読む)
1 - 20 / 61
[ Back to top ]