
Fターム[5E313FG01]の内容
電気部品の供給、取付け (45,778) | 付属技術、周辺技術 (3,198) | 実装システムの設計 (955)
Fターム[5E313FG01]に分類される特許
201 - 220 / 955
電子部品実装システムおよび電子部品実装方法
【課題】生産対象の品種の特性に応じて多様な実装作業形態を適宜選択することが可能なフレキシブルで生産効率にすぐれた電子部品実装システムおよび電子部品実装方法を提供することを目的とする。
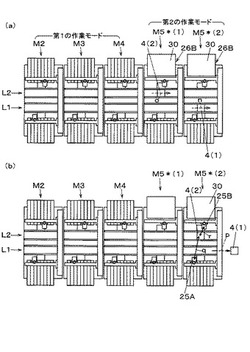
【解決手段】第1実装レーンL1、第2実装レーンL2を備えた複数の電子部品搭載装置M2〜電子部品搭載装置M5*を連結した構成の電子部品実装システムにおいて、一の作業動作機構によってこの作業動作機構に対応した基板搬送機構の基板のみを対象として作業動作を実行させる第1の作業モードと、一の作業動作機構によって複数の基板搬送機構の複数の基板のいずれをも対象として作業動作を実行可能な第2の作業モードとの2つの作業モードのうちいずれかを選択的に実行可能な構成とし、トレイフィーダ30が装着された2基の電子部品搭載装置M5*のみを第2の作業モードとする。
(もっと読む)
部品実装方法、および、部品実装システム

【課題】実装ラインの稼働効率の低下を抑制しうる効率の良い段取り替えタイミングの報知。
【解決手段】実装ラインにおいて、第一基板201から第二基板202へ切り替わる際に、部品実装装置101の内のいずれか一つである着目装置131を第二基板202が実装できるように段取り替えする時間を取得する段取り時間取得ステップと、着目装置131よりも上流にある部品実装装置101が第二基板202の処理を開始してから着目装置131に到達するまでの時間を取得する到達時間取得ステップと、段取り時間を超える到達時間に対応する部品実装装置101を特定装置132として特定する特定ステップと、特定装置132に第二基板202が搬送される際に、着目装置131の段取り替えの開始情報を報知する報知ステップとを含む。
(もっと読む)
電子部品実装システムおよび電子部品実装方法
【課題】生産対象の品種の特性に応じて多様な実装作業形態を適宜選択することが可能なフレキシブルで生産効率にすぐれた電子部品実装システムおよび電子部品実装方法を提供することを目的とする。
【解決手段】第1実装レーンL1、第2実装レーンL2を備えた複数の検査・塗布装置M1、電子部品搭載装置M2〜電子部品搭載装置M4を連結した構成の電子部品実装システムにおいて、一の作業動作機構によってこの作業動作機構に対応した基板搬送機構の基板のみを対象として作業動作を実行させる第1の作業モードと、一の作業動作機構によって複数の基板搬送機構の複数の基板のいずれをも対象として作業動作を実行可能な第2の作業モードとの2つの作業モードのうちいずれかを選択的に実行可能な構成とし、検査ヘッド15,塗布ヘッド16を備えた検査・塗布装置M1のみを第2の作業モードとする。
(もっと読む)
電子回路部品装着方法,電子回路部品装着機および立体被装着体保持治具
【課題】立体被装着体への電子回路部品の装着を行うために改善された電子回路部品装着方法,電子回路部品装着機および立体被装着体保持治具を提供する。
【解決手段】立体基板保持治具160の第二部分182を第一部分180に対して上昇させ、立体基板支持体186をパレット184から持ち上げ、立体基板140を支持させてパレット184から浮き上がらせた状態で駆動装置334により水平軸線まわりに回動させる。カム270,272のカム面の当接面296への当接により、立体基板140の上面142に対して傾斜した側面が順次、水平に位置決めされ、平板状の回路基板と同様に吸着ノズルの水平方向移動,昇降により電子回路部品が装着される。立体基板支持体186を回動装置336によって鉛直軸線まわりに回動させることにより水平軸線の向きを変え、立体基板140を別の水平軸線まわりに回動させ、別の側面を水平とし、電子回路部品を装着させる。
(もっと読む)
実装機
【課題】トレイに保持された部品を基板上に実装する動作に要する合計時間が増加するのを抑制することが可能な実装機を提供する。
【解決手段】この実装機100は、4個の部品を同時に吸着可能な吸着ヘッド3aを有するヘッドユニット3と、ヘッドユニット3を制御する制御装置13とを備え、制御装置13は、トレイ10aから4個の部品を同時に吸着させる通常動作と、通常動作時に同時に吸着された4個の部品のうちの少なくとも1つの部品が実装されない場合に、トレイ10aの所定のブロックから代替部品を吸着させるリトライ動作とを行うとともに、リトライ動作を行った後で次の通常動作を行う際に、代替部品を吸着した所定のブロックとは異なるブロックに配置された4個の部品を吸着ヘッド3aに同時に吸着させるようにヘッドユニット3を制御するように構成されている。
(もっと読む)
電子部品装着装置
【課題】ノズルストッカの種類の識別に要する処理時間の低減を図り、もってプリント基板の生産処理の効率化を図ること。
【解決手段】作業管理者はタッチパネルスイッチ26である交換開始スイッチ部を押圧操作して、装着ヘッド6に吸着ノズル5の交換開始を指示する。すると、制御装置23は、初めに「場所1」に設置されたノズルストッカ13に付された位置決めマークM3及び識別用マークM5の上方位置まで基板認識カメラ12を移動させて、基板認識カメラ12が1点目の位置決めマークM3及び識別用マークM5を一括して撮像し、その撮像画像に基づいて認識処理装置29が位置決めマークM3を認識処理してノズルストッカ13の位置を把握し、次いで識別用マークM5を認識処理して有無とこのマークの位置を把握する。この識別用マークM5の認識処理結果に基づいて、設定したノズルストッカ13の種類と一致しているかを制御装置21が判定する。
(もっと読む)
電子部品実装システムおよび電子部品実装方法
【課題】複数の単位実装区画に区分された基板を対象として部品実装作業を行う場合に、簡便な設備構成でマーク読取り結果と部品実装作業の対象となる基板との対応関係を適正且つ効率よく確保することができる電子部品実装システムおよび電子部品実装方法を提供することを目的とする。
【解決手段】上流側から伝達されたマーク読取りデータ34に基づいて、対象基板データ34bと実際に対象となる対象基板との対応関係の正否を判定する対応関係判定において、上流側に滞留する滞留基板についての滞留基板データ34aと対象基板についての対象基板データ34bとを比較対照して、滞留基板データ34aと対象基板データ34bにおいてマーク読取り結果が相異なる単位実装区画を抽出し、対象基板の当該単位実装区画について判別マークの読取りを行うことにより対応関係の正否を判定する。
(もっと読む)
電子部品装着装置、電子部品装着装置システム、および、電子部品装着方法
【課題】部品の装着データに基づいて、自動的に部品を基板上に装着する電子部品装着装置において、様々な基板のパターンに対応して、生産時間を短縮できるようにする。
【解決手段】電子部品装着装置には、各々部品装着パターンを有し、各々にバーコードが付与された一つ以上のセルを搭載したマザーボードが搬入される。RAMには、各々のセルに対し、セル上に搭載する部品とその部品の装着位置を示す装着データと、バーコード情報とセルの装着データを対応付けるテーブルが保持されており、画像認識処理装置は、カメラにより読取られたセルに付与されたバーコードの画像を認識して、バーコード情報を求める。CPUは、バーコード情報とセルの装着データを対応付けるテーブルより、対応するセルの装着データを求めて、求めた装着データに基づき、該当するセル上の部品とその部品の装着位置を駆動回路に指示する。
(もっと読む)
部品実装装置および部品実装装置におけるモータ制御方法
【課題】過負荷状態の確実な防止と動作効率の維持向上を両立させることができる部品実装装置および部品実装装置におけるモータ制御方法を提供すること。
【解決手段】モータの負荷状態を負荷検出部によって検出して監視し、負荷率が当該モータの定格負荷に基づいて予め設定された基準負荷率を超えた場合には、負荷率が予め設定された低減率Δp1で減少するようにモータの回転速度・回転加速度の組み合わせで規定される駆動パラメータを変更させる負荷低減処理を行い、負荷率が低減された状態で部品実装作業を継続実行する過程において、負荷率が基準負荷率を超える状態が発生しなかった場合には、負荷率が予め設定された回復率Δp2で段階的に増加するように駆動パラメータを変更する負荷率回復処理を反復して行い、負荷率が再度基準負荷率レベルを超えた場合には、直前の負荷率に戻してこの負荷率を確定駆動パラメータとして設定する。
(もっと読む)
部品実装装置および部品実装装置におけるモータ制御方法
【課題】過負荷状態の確実な防止と動作効率の維持向上を両立させることができる部品実装装置および部品実装装置におけるモータ制御方法を提供すること。
【解決手段】実装ヘッドを移動させるヘッド移動機構などを駆動するモータの負荷状態を規定する駆動パラメータ34を、実装ヘッドが部品供給部と基板との間を1往復する実装ターン毎に、モータの負荷率が当該モータの定格負荷に基づいて予め設定された基準負荷率を超えないように、当該実装ターンにおける作業動作パターンに対応して実装ターン別パラメータ37として複数の実装ターンのそれぞれについて個別に設定する。これにより、実装ターン毎の作業負荷が大きくばらつく場合にあっても、過負荷状態の確実な防止と動作効率の維持向上を両立させることができる。
(もっと読む)
部品実装装置およびトレイフィーダにおけるトレイ交換方法
【課題】トレイフィーダによって供給される部品を基板に実装する部品実装装置において、トレイ交換のための装置停止時間を短縮して生産性を向上させることができる部品実装装置およびトレイフィーダにおけるトレイ交換方法を提供する。
【解決手段】部品切れとなったトレイ6を保持するパレット24が新たなトレイ6との交換のためにパレット載置部27へ載置される。次に、パレット載置部27からパレット収納部23へ移動するパレット移動動作における戻し入れ先の収納アドレスを、パレット情報読み取りセンサ32によるパレット識別マークの読み取り結果と予め記憶されたパレット収納データとに基づき特定する。これにより、2つ以上のパレット24に部品切れが重複して発生した場合にあっても、特定される戻し入れ先の収納アドレスに対応するパレット収納部23に当該パレット24を戻し入れることができる。
(もっと読む)
基板生産方法および電子部品実装装置
【課題】部品切れ等によって優先レーンでの生産が継続できなくなった場合は、他の生産可能なレーンに生産を切替え、その後、優先レーンでの生産が可能となった場合に、優先レーンに生産復帰する基板生産方法および装置を提供する。
【解決手段】複数の基板搬送レーン17、18のうち先に基板16が投入された基板搬送レーンを優先レーンに設定し、優先レーン上の基板に電子部品を実装し、優先レーン上の基板の生産が継続できなくなった場合には、他の生産可能な基板搬送レーン上の基板に電子部品を実装するように生産するレーンを切替え、その後、優先レーン上の基板の生産が継続できるようになった段階で、優先レーン上の基板に電子部品を実装するように生産復帰させるようにした。
(もっと読む)
電子部品装着ライン及び電子部品装着ラインのフィーダ段取り方法
【課題】
本発明は、電子部品装着ライン全体として、フィーダカートに然るべき電子部品を間違いなく、確実にセットできる信頼性の高い電子部品装着装置ラインまたはそのラインのフィーダ段取り方法を提供する。
【解決手段】
本発明は、複数の電子部品装着装置と具備し、電子部品の具備するフィーダの設置位置を探索する照合データを読み取り、前記照合データと前記フィーダ設置位置と関連付けるフィーダ段取りデータに基づいて前記設置位置を照合して段取りする際に、前記フィーダ段取りデータは、前記複数の電子部品装着装置の個々の段取りデータである装置フィーダ段取りデータを有したラインフィーダ段取りデータであり、前記照合ステップは前記ラインフィーダ段取りデータに基づいて行なうことを特徴とする。
(もっと読む)
マウント装置
【課題】装置の稼働率をより向上でき得るマウント装置を提供する。
【解決手段】基板上に電子部品をマウントするマウント部は、電子部品を保持して搬送するマウントヘッドと、電子部品を一列に並べて保持するキャリアテープを順次、送り出すテープ送出機構と、キャリアテープの交換に要する時間に必要な数の電子部品が貯留されるバッファ部と、を備える。制御部は、マウントヘッドに対し、キャリアテープから電子部品が全て取り出されてからテープ交換が完了するまでの間は、バッファ部からの電子部品の取り出しを、その他の間は前記キャリアテープからの電子部品取り出しを、指示する。
(もっと読む)
基板収容装置
【課題】先に追加された基板または基板保持部材ほど、先に取り出される基板収容装置を提供する。
【解決手段】1以上の基板100を積層した状態で収容する基板収容機構は、積層された基板100を下方から支える支持台17を備える。この支持台17は、下方から供給される基板100aにより上方向に押圧されることで、当該供給される基板100aの通過を許容する退避位置に移動する。また、この基板100aによる押圧が解除されると、支持台17は、バネの付勢力により積層された基板100bを支える支持位置に移動する。
(もっと読む)
スプライシング誤作業防止方法
【課題】フィーダにリールを誤装着してスプライシングを行ったときに誤実装の発生を防止できるスプライシング誤作業防止方法を提供すること。
【解決手段】スプライシング後に次リール23としてフィーダ21に装着された装着リール23の識別情報を端末機80により読取って装着リール部品の部品種を識別するようにしている。よって、正しい部品が収容されたリール23に交換され該リール23のテープ24が繋げられたことをシステム的にチェックすることができ、誤った部品が基板に装着されることを防止することができる。
(もっと読む)
基板前処理装置
【課題】基板の前処理をより効率的に行うことができる基板前処理装置を提供する。
【解決手段】基板前処理装置10は、1種類以上の基板100を、基板種類ごとに積層した状態で収容する収容部12と、収容部12から基板100を取り出してレール31上に搬送する搬送ヘッド20と、レール31上に搬送された基板100にマーキングを施すマーカーヘッド26と、を備える。制御部は、搬送ヘッド20での基板100のY方向搬送量およびマーカーヘッド26のX方向移動量を制御することで、基板100に対するマーカーヘッド26の位置を制御する。
(もっと読む)
部品吸着検査装置および方法
【課題】側面映像を利用して部品の正常吸着可否を検査する装置および方法を提供する。
【解決手段】本発明の一実施形態による部品吸着検査装置は、部品を吸着する少なくとも一つのノズルを具備するヘッド部と、前記ヘッド部に具備されたノズルおよび前記ノズルに吸着された部品の側面映像を獲得する側面撮影部と、前記側面撮影部が獲得した前記側面映像を分析して獲得した部品の厚さおよび位置情報に基づいて前記ノズルに吸着された部品の正常吸着可否を判断する吸着判断部とを含む。
(もっと読む)
電子部品装着方法及び電子部品装着装置
【課題】吸着取出し動作の安定化を図ると共に、作業者による作業の効率化を図ること。
【解決手段】対象電子部品の吸着動作の前に、この電子部品を供給する部品供給ユニット5の部品吸着取出し位置PUの収納テープCの収納凹部Ccを基板認識カメラ19が撮像して、認識処理装置23が認識処理をし、CPU20が前記収納凹部Ccのセンタ位置を把握する。そして、前記把握できた場合には、CPU20は収納凹部Ccのポケット寸法と電子部品の部品寸法とを比較する。そして、電子部品と収納凹部Ccとのクリアランスを、CPU20がX及びY方向につき、夫々算出する。この算出したクリアランス△X、△Yが許容値Xaを超えているか否かを判定し、超えている場合には、CPU20は取出し吸着位置自動追従機能を実施しない設定をし、超えていない場合には、CPU20は取出し吸着位置自動追従機能を実施する設定をするように制御する。
(もっと読む)
電子部品実装装置
【課題】効率よく高い精度で電子部品を実装することができ、かつ、消費エネルギーをより低減することができる電子部品実装装置を提供することを課題とする。
【解決手段】ノズルで吸着した電子部品を基板に搭載する電子部品実装装置であって、電子部品を吸着するノズルを備える第1吸着部と、電子部品を吸着するノズルを備え、かつ、当該ノズルが第1吸着部のノズルと同じ向きを向いている第2吸着部と、第1吸着部と第2吸着部とに連結された連結機構及び連結機構を移動させることで第1吸着部と第2吸着部とを基板の表面に対して直交する方向に移動させる駆動機構を備えるZ軸駆動部と、含むヘッドと、ヘッドの動作を制御する制御部と、を有し、連結機構は、駆動機構により移動されることで、第1吸着部と第2吸着部とを、互いに逆方向に移動させることで上記課題を解決する。
(もっと読む)
201 - 220 / 955
[ Back to top ]