
Fターム[5F031JA21]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出の目的 (2,253)
Fターム[5F031JA21]の下位に属するFターム
存在の有無、存在位置(アドレス) (967)
容器内での位置ずれ(傾き、はみ出し等) (89)
固着、保持位置のずれ (1,125)
Fターム[5F031JA21]に分類される特許
21 - 40 / 72
移載装置
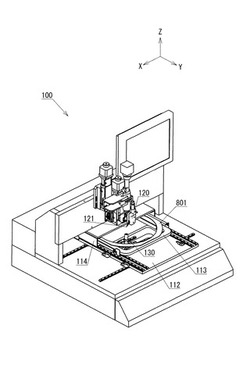
【課題】設置スペースを小さくすることができる移載装置を提供する。
【解決手段】移載動作の開始を指示されると、移載装置100は、ベーステーブル112をX軸方向に適宜移動させるとともに、下テーブル113をY軸方向に適宜移動させることにより、下テーブル113に載置されたウェーハリング801に保持された移載対象チップの位置決めを行う。次に、チップ保持部120を下降させて、フィンガー部121で移載対象チップを把持することによって、移載対象チップをピックアップする。次に、ベーステーブル112をX軸方向に適宜移動させるとともに、上テーブル114をY軸方向に適宜移動させることにより、上テーブル114において移載対象チップを載置する位置の位置決めを行う。次に、チップ保持部120を下降させて、ピックアップした移載対象チップを所定の位置に載置する。
(もっと読む)
一体化されたウェハ受渡し機構
一体化された高速ロボット機構が、搬送機器を改良し、対象物移動を位置合わせ又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、通常、対象物をチャンバに出し入れするためのエンドエフェクタと、中心合わせ及びシータ位置合わせ能力を提供するためにロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有する。本発明は、複数の一体化されたロボットアセンブリと、受渡しシステムとを有する受渡しロボットシステムも開示しており、この場合、受渡しロボットシステムは、FOUP又はFOSB、フロントエンドモジュール(FEM)、又はソータ等の複数の結合されたチャンバのために働く。移動するロボットへのこれらの組み込まれた能力の使用により、1つの対象物受渡し操作が、毎時500パーツを超えることができる。  (もっと読む)
(もっと読む)
板状製品保護用カセットの変形検知システム

【課題】保護用カセットの許容量以上の変形を検知することで、保護用カセットと板状製品との接触を抑制して板状製品及び/又はカセットの損傷又は破損を未然に防止するようにした板状製品保護用カセットの変形検知システムを提供すること。
【解決手段】板状製品1を収納するようにした保護用カセット2を載置する置き台3の上部に複数の距離センサ4a、4b、4cを配置し、距離センサ4a、4b、4cにより、置き台3の上に載置した保護用カセット2の上面との距離を計測し、各距離センサ4a、4b、4cによる計測値a、b、cと、予め設定した許容値a0、b0、c0とを比較することにより保護用カセット2の変形を検知する。
(もっと読む)
プローブ位置決め装置
【課題】プローブの位置決めを、比較的広いレンジにおいて、精度良く行うことができる装置を提供する。
【解決手段】プローブ1及び2は、試料20の近傍に配置される。電子銃3は、試料20の近傍のX−Y平面において、電子ビームを走査させる。プローブ用吸収電流測定部4及び5は、電子ビームの走査に伴ってプローブ1及び2に生じる吸収電流を測定する。プローブにおける吸収電流を測定した時点での電子ビームの照射位置の情報を用いて、プローブの位置を特定することができる。電子ビームの走査によりSEM画像を取得していれば、SEM画像中におけるプローブを特定することも可能である。
(もっと読む)
基板収納装置
【課題】従来の基板収納装置では、基板識別情報及び基板に関して測定された基板に付随する情報を移動させることができず、基板の識別情報と基板データとの整合性を確保することが困難であった。
【解決手段】本発明にかかる基板収納装置は、上部板と下部板及び、当該上部板と当該下部板との間に形成された支持部材を有し、複数の基板を収納して移動あるいは搬送が可能な基板収納装置であって、前記複数の基板を一枚ずつ互いに間隔をあけて保持する前記支持部材に形成された保持部と、前記複数の基板のそれぞれの識別情報及び付帯情報を取得する情報取得部とを有する。
(もっと読む)
基板搬送装置及び縦型熱処理装置
【課題】基板の大口径化や超大口径化に伴う基板搬送時の基板中央部の自重による撓みを抑制ないし防止する。
【解決手段】大口径の基板wの上方又は下方に移動される支持部17と、該支持部17に設けられ基板wの周縁部を掴んで支持する掴み機構28とを有する基板搬送装置において、上記支持部17に、基板の上面中央部又は下面中央部を撓まないように空気層を介して非接触で吸引保持する非接触吸引保持部30を1つ又は複数設け、該非接触吸引保持部30は、上記基板の上面又は下面に向って突設された柱体又は錐体からなる負圧形成突部31と、該負圧形成突部31に対して側方から気体を噴出することにより負圧形成突部31の近傍に負圧を形成するための気体噴出ノズル32とを備えている。
(もっと読む)
一方の面にドーピングされるウエハ、特にソーラウエハのスタックの形成方法、及びプロセスボートに複数のウエハバッチを積み込むハンドリングシステム
本発明は、ウエハのバッチをプロセスボートに装填して一方の面にドーピングするためのウエハ、特にソーラウエハのスタックを形成する方法に関するものであり、これは、上方面積み重ね開口を備えた水平面部にクランプされるように所定の偶数個のウエハが連続的に移送キャリアの受け入れスロット内に供給される。パッケージ密度を高めて、拡散工程の処理量を高めるために、移送キャリアに連続的に供給されたウエハの半数分が、第1のウエハスタックの形態として、移送キャリアから移送キャリアの外側に位置するマウントされた待機位置に出され、そして、移送キャリアに連続的に供給されたウエハの残り半数分が、第2のウエハスタックの形態として、移送キャリアから出され、第2のウエハスタックは、該第2のウエハスタックのウエハが待機位置にある第1のウエハスタックのウエハの位置と180°回転した位置に到達するように回転された状態とし、第2のウエハスタックが第1のウエハスタックの待機位置に続いて移動され、それと整列し、第1のウエハスタックとフィッティングを形成するように共に結合して、第1及び第2のウエハスタックの相互に組み合わされるウエハのドーピングがされない面が同時且つ形状一致で相互に当接することにより、それぞれパッケージ状の背中合わせのウエハバッチ(BTBウエハバッチ)を形成し、そして、BTBウエハバッチが移動グリッパにより、フィッティングの形態としてピックアップされて、プロセスボートに装填される。 (もっと読む)
基板の位置決め方法、基板の位置決め装置、搬送装置及びプロセス装置
【課題】ガラス基板自体の撓みや変形を考慮して、位置精度を向上させた基板の位置決め方法、基板の位置決め装置、搬送装置及びプロセス装置を提供する。
【解決手段】押付プレート10、13がガラス基板3の最大静止摩擦力に等しい荷重又はトルクをガラス基板3側に付与した後、ガラス基板3が基準面プレート6、8に押し当てられて、ガラス基板3に付与する押付プレート10、13の荷重又はトルクがガラス基板3の動摩擦力より大きくなった時点をもって、ガラス基板3の位置決めが完了したと判断する。
(もっと読む)
搬送用ロボットの教示方法
【課題】モニタ画像を見ながら教示作業を進めることができ、したがって、安全性に優れるとともに少ない手間で迅速に基準位置を教示することができる搬送用ロボットの教示方法を提供する。
【解決手段】予めマスタリング工程において基準位置に係るハンド8とカセット2との適正な相対的位置関係を示すモデル画像を撮影しておき、ティーチング工程においては、モデル画像に実空間画像を重畳的にモニタ表示し、両画像が一致したときの搬送用ロボット1の姿勢を基準位置として教示する。この教示方法は、複数箇所の基準位置を簡単確実に、しかも高精度にロボットに教示することが可能であり、ハンド8の姿勢制御に精密性と正確性が要求される、大型のワーク3を搬送対象とする搬送用ロボット1に好適に採用できる。
(もっと読む)
粘着テープ切断方法およびこれを用いた粘着テープ貼付け装置
【課題】リングフレームの半導体ウエハを接着保持する支持用粘着テープの切断精度を向上させることのできる粘着テープ切断方法およびこれを用いた粘着テープ貼付け装置を提供する。
【解決手段】カッタ刃42を装着したカッタホルダ43の先端側の基準面62を支持用粘着テープDTの基材bの表面に接触させた状態で、カッタホルダ43の基準面を基材表面に追従させながら支持用粘着テープDTを切断してゆく。このとき、カッタ刃42の先端が、粘着層aを貫通させずにリングフレームfとの接着界面の間際を通過させる。
(もっと読む)
粘着テープ切断方法およびこれを用いた粘着テープ貼付け装置
【課題】リングフレームの半導体ウエハを接着保持する支持用粘着テープの切断精度を向上させることのできる粘着テープ切断方法およびこれを用いた粘着テープ貼付け装置を提供する。
【解決手段】リングフレームに帯状の支持用粘着テープを貼り付け、この支持用粘着テープに先端を楔状に切り落とした扁平面59を有するカッタ刃42を突き刺して貫通させ、この扁平面59をリングフレームのテープ貼付け面に接触させながらリングフレームの形状に沿って切断する。切断後に、切り抜いた帯状の支持用粘着テープを剥離する。支持用粘着テープの貼り付けられたリングフレームの中央にウエハを載置保持し、裏面から貼付ローラを転動させてマウントフレームを作製する。
(もっと読む)
半導体装置の製造方法
【課題】薄型化したチップをダイボンディングする工程において、ウエハシートからチップをピックアップする際に、ピックアップ対象のチップを正確に認識できる技術を提供する。
【解決手段】カメラCAM1は鏡筒KT1の一端と接続され、鏡筒KT1の他端には対物レンズが取り付けられ、この対物レンズを通してチップ1Cの主面の画像を撮影する構成とし、鏡筒KT1とチップ1Cとの間には、面発光照明SSL1、拡散板KB1およびハーフミラーTK1を内部に備え、カメラCAM1と同じ光軸でチップ1Cの主面に光を照射する同軸落射照明の機能を有する鏡筒KT2を配置する。
(もっと読む)
露光装置及び露光方法
【課題】ウエハステージの振動の、露光精度への影響を抑制する。
【解決手段】主制御装置20が、ウエハW上の複数のショット領域に対して順次露光する際に、ウエハを保持して2次元面に沿って移動可能なウエハステージWSTの走査方向に関する加速度と速度が同時に零とならないように、ウエハステージの移動を制御する。これにより、1枚のウエハを露光する間に、ウエハステージが停止することがないので、スループットの向上を図ることが可能となり、また、各ショット領域に対する走査露光開始直前に、ウエハステージを急激に加速しなくても良いため、加速に起因するウエハステージの振動が露光精度に与える影響を極力抑制することができる。
(もっと読む)
真空処理装置、静電チャックの診断方法及び記憶媒体
【課題】基板に対する真空処理の運用等において静電チャックの使用開始の前に、誘電体層の絶縁状態を診断することが可能な真空処理装置等を提供する。
【解決手段】ガラス基板G等を吸着保持するための溶射タイプの静電チャック22において、高圧直流電源67は静電チャック22のチャック電極24に、ガラス基板Gを吸着保持する場合よりも低い直流電圧である診断電圧を印加し、各測定器70、71は測定位置における電気的特性(電圧や電流)の測定データを取得する。そして、診断部としての役割を果たす制御部80は、上述の電気的特性の測定データと夫々の電気的特性について予め定められた設定データ(しきい値)とを比較して、この静電チャック22が使用可能な状態となっているか否かを診断する。
(もっと読む)
基板収納容器及び識別部材
【課題】被検出面の位置ずれを防止して、被検出面を確実に検知することが可能な基板収納容器及び識別部材を提供する。
【解決手段】センサによって検出される被検出面13aを有する被検出部を設けると共に、被検出部から外方に向かって異なる方向に延びる複数のアーム部15,16を形成させる。アーム部15,16には、被検出部から離間した位置で容器本体に固定される固定部19,20を設け、被検出部には、被検出面13aと反対方向に突出して容器本体に当接する受け部17bを設ける。これらにより、安定した状態で被検出部を保持することができる。従って、被検出面13aの位置ずれを防止することが可能となるため、センサにより被検出面13aが確実に検知される。アーム部15,16の長さ、向きを変えることで、被検出面13aを任意の位置に配置させることができる。
(もっと読む)
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
研削装置
【課題】いわゆるオープンカセットを用いる場合の不具合を解消することができる研削装置を提供すること。
【解決手段】第一のカセットテーブル12と第二のカセットテーブル14に載置された第一のカセットと第二のカセットをそれぞれ閉塞する閉塞位置に位置づけ可能な第一のカセットカバー66と第二のカセットカバー67を設けるとともに、第一のカセットと搬出手段との間、および第二のカセットと搬入手段との間をそれぞれ開閉可能に仕切る第一の仕切り壁64と第二の仕切り壁65を設け、第一の仕切り壁64や第二の仕切り壁65の開状態で搬出手段または搬入手段が作用する時にはそれぞれ第一のカセットカバー66や第二のカセットカバー67により閉塞させることで、手が入り込まないようにした。
(もっと読む)
半導体ウェーハ収納容器の金属汚染分析方法
【課題】半導体ウェーハ収納容器の金属不純物を高回収率で回収し、容器内の金属汚染を高感度に分析し得る手段を提供する。
【解決手段】半導体ウェーハ収納容器内に、シリコンウェーハならびにHFガスおよびHNO3ガス発生源を配置した後に容器を密閉し、ガス発生源からHFガスおよびHNO3ガスを発生させて5〜60分放置した後に、容器内部に発生した液滴を回収し、次いで、回収された液滴中の金属成分を分析する。ガス発生源はフッ化水素酸、硝酸および硫酸を含む溶液である。
(もっと読む)
基板の洗浄装置
【課題】簡易かつコンパクトな構成で高い洗浄性能を発揮できる基板の洗浄装置を提供する。
【解決手段】テーブル上面12Aで被洗浄ワークWを吸引保持しながら回転駆動されるワークテーブル12と、円筒状の駆動軸14Bがモータ本体14Aを貫通して設けられるとともに、ワークテーブルの下面に駆動軸の一端が固着されている駆動モータ14と、駆動軸の他端が内部の密閉空間18Aに配されるとともに、密閉空間と外部とを連通させる排気孔18Cが形成されている密閉容器18と、密閉容器の排気孔に接続される減圧手段とを備える。駆動軸、密閉空間、及び排気孔を介してワークテーブル上面と減圧手段とが連通することにより、ワークテーブルの上面に被洗浄ワークを吸引保持しながら回転駆動可能となっている。
(もっと読む)
チップピックアップ装置およびチップピックアップ方法ならびにチップ剥離装置およびチップ剥離方法
【課題】チップを高速でダメージを与えることなくピックアップすることができるチップピックアップ装置およびチップピックアップ方法ならびにチップ剥離装置およびチップ剥離方法を提供することを目的とする。
【解決手段】シート5に貼り付けられたチップ6を取出しノズル20によって吸着保持してピックアップするチップピックアップ装置において、剥離ツール22の上面の当接支持面に設けられた凹部22c内に、ゴムなどの可撓性の弾性体を球面状に成形したシート押上部材24を装着し、取出しノズル20の下降状態においてシート押上げ部材24の押上面をシート5の下面に平面状に倣わせて当接させ、取出しノズル20がチップ6とともに上昇する上昇動作において押上面を上に凸形の曲面状に変形させながらシート5の下面を押し上げる。これにより、シート5とチップ6とをチップ外縁側から剥離させることができる。
(もっと読む)
21 - 40 / 72
[ Back to top ]