
Fターム[5F031LA12]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | ボールネジ、送りネジ (397)
Fターム[5F031LA12]に分類される特許
81 - 100 / 397
基板処理装置、基板処理方法及び記憶媒体
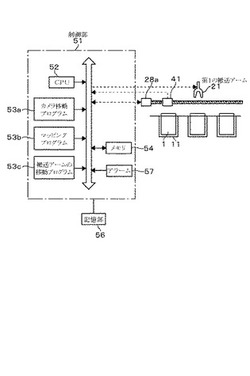
【課題】横並びに複数配置された載置台上の搬送容器から基板搬送機構により基板を取り出して処理を行うにあたり、載置台上の搬送容器内の基板の高さ位置を正確に求めること。
【解決手段】載置台11を複数配置すると共に、少なくとも2つの載置台11の並びに沿って前記大気搬送室22内を移動自在な撮像ユニット41を設けて、載置台11上のFOUP1内においてウエハWが収納される収納領域2全体を撮像ユニット41により一括して撮像し、この撮像結果に基づいて前記FOUP1内のウエハWの高さ位置を検出する。
(もっと読む)
粘着テープ貼付け方法およびこれを用いた装置

【課題】半導体ウエハの形状に切り抜いた後の不要な粘着テープを精度よく巻き取るとともに、粘着テープをウエハに精度よく貼付ける方法及び装置を提供する。
【解決手段】半導体ウエハに貼付けられた帯状の粘着テープをテープ切断機構によりウエハ形状に切り抜き、この切り抜かれた不要テープを巻き取り回収する過程で、テープ両端の狭小部位を案内するサイドローラ36a、36bの回転角をロータリエンコーダ38で検出する。この実測による実回転角と予め決めた基準回転角とを比較して不要テープの狭小部位の破断を判別部が判断する。
(もっと読む)
シート貼付装置
【課題】小型かつ比較的安価な構成で、ワークにシートを粘着剤層を介して貼付することのできるシート貼付装置を提供すること。
【解決手段】シート貼付装置100では、クリーニングエリア20へのワークWの搬入、クリーニングエリア20から貼付エリア30へのワークWの搬送、および貼付エリア30からのワークWの搬出などを共通のロボット50で行なう。また、クリーニングエリア20では、ワークWがロボット50に保持された状態でクリーニングが行なわれ、貼付エリア30では、ワークWがロボット50に保持された状態でシートSの貼付が行なわれる。このため、各エリアにワークWを搬入した際、ワークWを整列させる必要がないなどの利点がある。
(もっと読む)
ワーク搬送装置、液滴吐出装置
【課題】ワークを短時間で搬送可能なワーク搬送装置を提供する。
【解決手段】第1ステージと、前記第1ステージに近接して配置された第2ステージと、を有し、各前記第1及び第2ステージには、ワークが載置される載置面と、前記載置面に設けられた通気孔と、前記通気孔にエアーを供給するエアー供給部と、が設けられ、前記ワークを保持するととともに、前記第1及び第2ステージ間において保持した前記ワークを搬送させるワーク搬送部と、を備えた。
(もっと読む)
搬送装置のメンテナンス方法
【課題】本発明は、搬送装置のメンテナンス作業を効率よく行うことができる搬送装置のメンテナンス方法を提供する。
【解決手段】 マスクケース搬送装置(29)のメンテナンス方法は、CZ軸駆動部(26)によってケース保持部(23)を上下方向の第1位置に配置する工程(S102)と、最上段、最下段および中央段に設けられた複数のCZ軸駆動部26のカバー部材のうち第1位置に配置されたケース保持部と異なる高さに位置するカバー部材を取り外す第1取り外し作業を行う工程(S106)と、第1取り外し作業後に取り外されていない複数の前記カバー部材のうち第1位置に配置されたケース保持部と異なる高さに位置するカバー部材を取り外す第2取り外し作業を行う工程(S107)と、を含む。
(もっと読む)
z運動し、多関節アームを備える直線真空ロボット
【課題】小さい設置面積を維持すると共に、処理ステーション毎に個別に滞留時間を制御することができるコスト及びスループットを改善下装置及び方法を提供する。
【解決手段】線形搬送チャンバは、線形トラックと、線形トラックに乗せられて、処理チャンバの側面に沿って基板を線形に搬送するロボットアームとを含み、処理チャンバに到達させる方法として、基板を、制御された雰囲気中にロードロックを介してフィードし、次いで搬送チャンバに沿ってフィードする。線形平行移動、回転と分節、及びz運動が可能な4軸ロボットアームが開示される。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】把持部材を半導体チップの上面に近づけたときに把持部材から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることのできるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドの先端から気体を噴出させながら下降させる。そして、吸着パッドの先端から噴出する気体の流量を流量センサで検出し、流量センサで検出した流量が予め定めた流量まで減少した時の吸着パッドの下降位置を吸着パッドがICチップの上面に接触する高さ位置として記憶手段に登録する。
(もっと読む)
アライメント方法
【課題】 高低差のある部位に形成されたアライメントマークを有する被加工物を高精度に加工可能なアライメント方法を提供することである。
【解決手段】 高低差を有する部位に渡ってアライメントマークが存在する被加工物の加工予定ラインを検出するアライメント方法であって、被加工物の上面から撮像手段を被加工物へ接近する方向に相対移動させて該アライメントマークの一部に焦点を合わせて撮像した後に、該アライメントマークの他部に焦点を合わせて撮像することを繰り返して複数の撮像画像を取得する撮像ステップと、取得した該複数の撮像画像を組み合わせ、一つの鮮明なマーク像を形成するマーク像形成ステップと、形成された該マーク像に基づいて、該加工予定ラインを検出する検出ステップと、を具備したことを特徴とする。
(もっと読む)
半導体装置の搬送装置、半導体装置の検査装置、及び、半導体装置の搬送方法
【課題】半導体装置の搬送効率を低下させずに、搬送装置における振動を軽減する。
【解決手段】半導体装置の搬送装置90は、半導体装置3を保持する搬送ハンド(第1搬送ハンド1)と、搬送ハンドを移動させる搬送ハンド移動機構(第1搬送ハンド移動機構10)を有する。更に、おもり(第1おもり31)と、おもりを移動させるおもり移動機構(第1おもり移動機構40)を有する。更に、搬送ハンド移動機構及びおもり移動機構の動作制御を行う制御部60を有する。制御部60は、おもりが搬送ハンドの移動と同期して該搬送ハンドと逆方向に移動するように、搬送ハンド移動機構及びおもり移動機構の動作制御を行う。
(もっと読む)
粘着テープ貼付け装置
【課題】大型化する粘着テープの原反ロールの装置への搬入、あるいは不要となった残渣テープやキャリアテープの装置からの搬出を容易にする
【解決手段】供給ボビン18の軸心を通る鉛直線上に回収ボビン43を配備し、テープ収容室24の前側両端に一対の連結機構24を備える。台枠先端に連結部を有する粘着テープ搬送台車を装置本体の連結機構25と連結し、粘着テープの原反ロール19を供給ボビン18に搬入するとともに、同じ位置で切断後の残渣テープT’のロールを回収ボビン43から搬出する。
(もっと読む)
搬送システム
【課題】効率を向上させることができる搬送システムを提供する。
【解決手段】制御装置7は、第1撮像装置5により撮像された撮像データに基づいて、ピックアップコレットにより次に吸着される電子部品の位置を確認し、ピックアップコレットの吸着端に電子部品が位置するようにウエーハフレームWを固定している固定部を移動させる。これにより、姿勢を矯正するための工程や処理装置を設けなくてよいので、処理時間を短くすることができる。また、電子部品を挟み込まずに姿勢を矯正することができるので、電子部品の破損を防ぐことができ、破損した電子部品を片付けることによる効率低下を防ぐことができる。
(もっと読む)
搬送機構および加工装置
【課題】カセットとワークの作業領域との間でワークを搬送する際の搬送ストロークを短くして、小型化を図ることができる搬送機構および加工装置を提供すること。
【解決手段】収容領域A1から作業領域A3に向かう一方向においては、第1の挟持部71に保持された半導体ウェーハWを収容領域A1から仮置領域A2に引き出させると共に、仮置領域A2でプッシュプルアーム61を半導体ウェーハWの後端側に回り込ませて、第2の当接部75により半導体ウェーハWを作業領域に押し込ませるように動作する。作業領域A3から収容領域A1に向かう他方向においては、第2の挟持部72に保持された半導体ウェーハWを作業領域A3から仮置領域A2に引き出させると共に、仮置領域A2でプッシュプルアーム61を半導体ウェーハWの後端側に回り込ませて、第1の当接部74により半導体ウェーハWを収容領域A1に押し込ませるように動作する。
(もっと読む)
保護テープ剥離方法およびその装置
【課題】保護テープを貼付けた状態の半導体ウエハに対してダイシング処理を行った後に、所定サイズに分断されたチップ部品から保護テープを剥離する保護テープ剥離方法およびその装置を提供する。
【解決手段】保護テープPTの貼付けられた状態でダイシング処理の施されたマウントフレームMFを裏面からチャックテーブル2により吸着保持するとともに、ヒータを埋設した吸着プレート25を当接させて加熱することにより粘着層を発泡膨張させて接着力を失わせた後、吸着力を維持しつつ吸着プレート25を上昇させて全てのチップ部品CPから保護テープPTを剥離する。
(もっと読む)
ロードポート装置、並びにその蓋体着脱装置及びマッピング装置の各昇降機構の制御方法
【課題】ロードポート装置を構成する蓋体着脱装置とマッピング装置の干渉を回避して、各装置の作動時間を可能な限りオーバーラップさせて、総作動時間の短縮を図る。
【解決手段】ロードポート装置Pを構成する蓋体着脱装置A及びマッピング装置Mには、蓋体吸着板5がマッピングセンサを取付けた主アームよりも設定値を超える値だけ低い位置に配置されたことを検出して、前記蓋体吸着板5と干渉することなく前記主アームの回動を可能とする干渉回避センサ装置Bを備え、前記干渉回避センサ装置Bにより前記設定値が検出された直後に、前記主アームをマッピング位置まで回動させて、マッピングを開始させる。
(もっと読む)
半導体検査用ウエハプローバ及び検査方法
【課題】製造コストの低減、装置の小型化及び省スペース化を図り、作業効率を向上させた。
【解決手段】プローバは、ウエハを設定位置で支持して当該ウエハの処理位置まで搬送して当該処理位置に設置されるトレイと、当該トレイに対して前記ウエハを前記設定位置に位置合わせする、1又は複数のアライメントユニットと、当該アライメントユニットよりも多く配置され前記処理位置で前記ウエハにコンタクトして検査処理を行うコンタクトユニットと、前記ウエハを支持した前記トレイを前記アライメントユニットと前記コンタクトユニットとの間で搬送するトレイ搬送部とを備えた。前記トレイは、前記チャックピンのXYZθ方向への移動を許容する3以上のピン穴と、前記ウエハの位置決め用のアライメントマークと、前記トレイ自体を位置合わせするアライメント部とを備えた。
(もっと読む)
基板保持装置
【課題】ガラス基板をリフトアップ、リフトダウンする際にガラス基板に作用する局所的な応力を発生させず、その結果、ガラス基板表面に形成した薄膜の損傷やガラス基板自体の割れを防ぐことを可能とする基板保持装置を提供する。
【解決手段】処理対象である基板を基板搬送アームで基板保持面の上方に搬送した後に基板保持面に載置し、基板を吸着保持する基板保持装置であって、平坦な基板保持面を形成するための複数の基板保持部と、基板保持面下で昇降する櫛歯状の基板保持面昇降部と、平坦な基板保持面に基板を吸着保持する基板吸着保持手段と、基板を基板保持面から浮上する基板浮上手段と、を備えたことを特徴とする基板保持装置。
(もっと読む)
加工装置
【課題】板状被加工物に変形が生成されている場合には、変形を自動的に強制して吸引保持させることができる加工装置を提供する。
【解決手段】搬送機構12は搬送プレート32と、搬送プレート32の下面に配設され、板状被加工物2を吸引保持する吸引保持板34、及び吸引保持板34を囲繞し且つ吸引保持板34の下面を越えて突出する弾性囲繞部材36と含む。吸引保持された板状被加工物2が支持機構10の吸引支持板26上に位置されると、搬送機構12の弾性囲繞部材36の下端が支持テーブル24の上面に接触されて、密閉空間Rが形成され、板状被加工物2の裏面と吸引保持板34の表面との間に間隙が生成されている場合には、吸引されることによって密閉空間Rに負圧が生成され、これによって大気圧により搬送プレート32が下降し弾性囲繞部材36が収縮され、板状被加工物2が吸引支持板26上に押圧され、板状被加工物2の変形が矯正される。
(もっと読む)
基板保持部材、基板搬送装置、基板搬送方法、ステージ装置、露光装置及びデバイス製造方法
【課題】基板の変形を抑えて基板の受け渡しができること。
【解決手段】基板を保持し、支持部によって支持される基板保持部材であって、前記基板が載置される載置面を有する基板載置部と、前記基板載置部と一体的に設けられ、前記載置面を含む面内に位置する所定軸を中心として前記基板載置部が回転可能なように前記支持部によって支持される被支持部とを備える。
(もっと読む)
表示パネルの受け渡し装置及び検査装置
【課題】 パネル受け渡し時の表示パネルの姿勢が受け渡し部の間で異なる検査装置にも適用可能にすること。
【解決手段】 表示パネルの受け渡し装置は、支持ブラケットを上下方向へ延びる第1の軸線の周りに回転可能に支持ベースに配置し、上下方向と交差する第2の方向へ伸縮可能のアームユニットを第3の方向へ延びる第2の軸線の周りに回転可能に該アームユニットの伸縮方向における一端部において支持ブラケットに支持させ、表示パネルを解除可能に保持するパネル保持装置を第3の方向へ延びる第3の軸線の周りに回転可能にアームユニットに支持させている。支持ブラケット、アームユニット及びパネル保持装置は、それぞれの駆動機構により回転され、またアームユニットは他の駆動機構により伸縮される。
(もっと読む)
フィルム基板の移載装置
【課題】フィルム基板を小さい吸着力で確実に吸着して移載できる装置を提供する。
【解決手段】載置面(14)に平置されたフィルム基板(11)を吸着して持ち上げる移載装置(1)であって、同一仮想平面上に配列された複数の吸着パッド(2)と、それらを支持する共通の昇降枠(3)と、該昇降枠を昇降させる昇降手段を備えるものにおいて、前記昇降手段が、前記載置面の拡がり方向に離れた2つの連結部(4a,4b)にて、前記載置面に平行でありかつ相互に平行な軸線回りの回動を許容した状態で、前記昇降枠にそれぞれ連結された2つの昇降部材(5a,5b)と、それらを相対的な速度差および/または時間差をもって上昇させる制御手段および駆動手段(6a,6b)を含む。
(もっと読む)
81 - 100 / 397
[ Back to top ]