
Fターム[5F031PA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 特殊目的 (8,207) | 工程管理,生産管理 (1,703) | 搬送の制御 (1,015)
Fターム[5F031PA02]の下位に属するFターム
処理部への搬出入のタイミングを制御 (149)
処理装置の制御も含むもの (122)
Fターム[5F031PA02]に分類される特許
121 - 140 / 744
露光装置及びデバイス製造方法
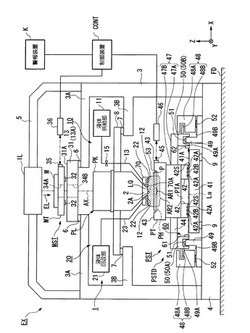
【課題】流出した液体による被害の拡大を防止し、露光処理及び計測処理を良好に行うことができる露光装置を提供する。
【解決手段】露光装置(EX)は、移動可能なテーブル(PT)と、テーブル(PT)の移動を案内する上面(41A)を有するベース部材(41)と、ベース部材(41)の上面(41A)に液体(LQ)が有るか否かを検出する検出装置(60)とを備えている。
(もっと読む)
搬送装置及びこれを用いた搬送処理装置

【課題】交互に基板を搬送するための2基の搬送機構を備える搬送装置であって、基板搬送時における基板の高さ精度が良く、かつ、基板の平行度が高い搬送装置を提供する。
【解決手段】搬送装置2は、搬送路10と、Y軸方向に延びるスライダーチャックガイド31及び32と、スライダーチャックガイド31及び32に沿って自在に移動するスライダーチャック41及び42とを備える。スライダーチャック41及び42の各々の上端面には、基板の下面に吸着する吸着面と、基板の下面にエア噴出する噴出口とが設けられている。スライダーチャックの各々は、基板の下面に吸着した状態で基板をY軸正方向に移動し、基板搬送後は、吸着状態を解除した状態でY軸負方向に復帰する。復帰時には、例えば、スライダーチャック41が基板62が通過する間、基板62の下面にエアを噴出して、基板62を浮上させる。
(もっと読む)
基板搬送処理装置及び基板搬送処理方法
【課題】独立した複数の装置間で、複数の基板を処理する場合においても、基板受け渡しに待ちを生じない基板搬送処理装置を提供する。
【解決手段】第1の基板処理装置の第1のセパレーションチャンバーと第2の基板処理装置の第2のセパレーションチャンバーとが、基板受け渡しチャンバーを介して気密に接続されており、基板受け渡しチャンバーは、設置床面に対して垂直方向に積み重ねられた第1の基板受け渡しステージと第2の基板受け渡しステージとを有する。
(もっと読む)
基板搬送方法
【課題】板を搬送し膜厚測定器との間で基板の受渡しを行う搬送用ロボットの待機時間を削除または減少させるように搬送用ロボットの基板搬送動作を制御することで、装置全体としてのスループットを向上させる。
【解決手段】基板の膜厚を測定する膜厚測定器との間で基板の受渡しを行いながら搬送用ロボットで基板を搬送する基板搬送方法において、膜厚測定器は、内部に搬入された基板に対する膜厚測定が終了する所定時間前に事前終了予告信号を出力し、膜厚測定器から出力された事前終了予告信号を受けて基板搬送動作を開始するように搬送用ロボットを制御する。
(もっと読む)
搬送システム
【課題】製造装置を変更した際に新たにケースの昇降を制御する制御部を用意する必要のない搬送システムを提供すること、および複数の製造装置を同時に設置した際に各製造装置にケースの昇降を制御する制御部を搭載する必要のない搬送システムを提供する。
【解決手段】オープナ20に、搬送機40との間で信号の送受信を行うことにより、ケース30の昇降を制御するオープナ制御盤21を備え、搬送機40に、オープナ制御盤21と信号の送受信を行うことにより、ケース30をオープナ20に載置させる。
(もっと読む)
被処理体の搬送方法、被処理体の搬送装置、及び、プログラム
【課題】異常が検知されていない被処理体を簡単、かつ、早く搬送することができる被処理体の搬送方法、被処理体の搬送装置、及び、プログラムを提供する。
【解決手段】ウエハボートに収納されている半導体ウエハに異常があると(ステップS2:Yes)、異常位置、及び、異常の種類を特定し(ステップS3)、スキップ位置を決定する(ステップS4)。次に、スキップ位置に収容された半導体ウエハの回収をスキップし、異常が検知されなかった半導体ウエハWの自動回収を実施する(ステップS5)。続いて、ウエハボート内に半導体ウエハが残存し(ステップS6:Yes)、自動回収可能な半導体ウエハがあると(ステップS7:Yes)、自動回収可能な半導体ウエハの自動回収を実施する(ステップS8)。そして、残存した半導体ウエハのマニュアル回収を実施する(ステップS10)。
(もっと読む)
基板の処理装置
【課題】小ロット処理に対応した塗布現像処理装置を提供する。
【解決手段】塗布現像処理装置のカセット搬入出部10のカセット載置台12の上方に、2段の空カセット載置台20、21と、カセット移送機構22が設けられる。空カセット載置台20、21は、外部カセット搬送装置Aが上下に通過できるように構成されている。各空カセット載置台20、21は、カセットが載置される4台のカセット移動装置30を有し、載置したカセットを隣のカセット移動装置に移送できる。外部カセット搬送装置Aによりカセット載置台12に搬入され、ウェハWが処理ステーションに搬送された空のカセットは、カセット移送機構22により空カセット載置台に一時的に貯め置かれる。空いたカセット載置台12には次のカセットが搬入される。空カセット載置台の空のカセットは、ウェハ処理が終了する前にカセット載置台12に戻される。
(もっと読む)
真空処理装置およびこれを用いた基板搬送方法
【課題】大型の基板で製膜処理等を行うにあたり、調整が容易で高速に基板搬送が可能な真空処理装置を提供する。
【解決手段】真空処理装置は、搬送室10、第1処理室12−1〜2、第2処理室12−3〜4、第1基板搬送台車20−1〜2、第2基板搬送台車20−3〜4を備える。搬送室10は、X方向に伸び、第1搬送領域10−1と第2搬送領域10−2を含む。第1処理室12−1〜2は、第1搬送領域10−1側に接続される。第2処理室12−3〜4は、第2搬送領域10−2側に接続される。第1基板搬送台車20−1〜2は、第1搬送領域10−1内を移動する。第2基板搬送台車20−3〜4は、第2搬送領域10−2内を移動する。第1基板搬送台車20−1〜2は第2処理室12−3〜4の少なくとも一つと第1処理室12−1〜2とに対し基板2を搬入、搬出する。第2基板搬送台車20−3〜4は第2処理室12−3〜4に対し基板2を搬入、搬出する。
(もっと読む)
基板搬送機構および偏光フィルムの貼合装置における基板支持部を備えた反転機構
【課題】基板を反転させるとともに、搬送方向に対する上記基板の配置を変更して、タクトタイムを短くすること。
【解決手段】本発明の基板搬送機構または偏光フィルムの貼合装置における基板支持部を備えた反転機構は、長方形の基板5を長辺または短辺が搬送方向に沿った状態にて搬送する第1基板搬送機構61と、上記基板を短辺または長辺が搬送方向に沿った状態にて搬送する第2基板搬送機構62とを備える基板搬送機構において、上記第1基板搬送機構61にて搬送された上記基板5を支持する基板支持部66a、66bに連結した基板反転部67の反転動作により、上記基板支持部に支持された上記基板5を反転させるとともに、配置を変更して第2基板搬送機構62に配置するように構成されている反転機構65を備えている。
(もっと読む)
基板搬送システムおよび基板処理システム
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
半導体製造装置における表示方法及び半導体製造装置
【課題】 各ウエハの処理/未処理だけでなく、処理が正常に終了したかどうかを表示して、正常ウエハと不良ウエハの区別を明確にし、正常ウエハと不良ウエハの混同を防ぐことができ、また、ウエハカセットの有無を表示してオペレータがウエハカセットを確実に搭載することができる半導体製造装置における表示方法及び半導体製造装置を提供する。
【解決手段】 少なくともカセットを格納するカセット室5と、処理を行うプロセスチャンバと、カセット内のウエハをプロセスチャンバ6へ搬送するための搬送室7とを備える半導体製造装置の表示部17に、上から見た当該半導体製造装置イメージを描画し、カセットの有無を表示する表示エリア8が設けられ、表示エリア8には、カセット室内にカセットが存在するかどうかが表示される半導体製造装置である。
(もっと読む)
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
マテリアルハンドリングシステム
【課題】ロットが誤って識別されないことを保証する証明機能をAMHSシステムを提供する。
【解決手段】マテリアルハンドリングシステムは、コントローラと、トランスポートシステムであって、このトランスポートシステムは、トランスポートトラックセクションおよびトランスポートビークルとを含み、トランスポートビークルは、トランスポートトラックセクションに沿って移動すると共にキャリアをトランスポートするようになっているトランスポートシステムと、特定のトランスポートトラックセクションに沿って位置する識別タグリーダーであって、この識別タグリーダーは、トランスポートビークルによってトランスポートされているキャリアの識別タグを読み出すと共に、情報信号をコントローラに送るようになっている識別タグリーダーと、を備え、コントローラは、情報信号に基づき、前記キャリアのロケーションを証明するようになっている。
(もっと読む)
大型基板収納装置
【課題】基板を一時的に収納、保管するための大型基板収納装置において、ロボット等によるランダムアクセス可能で、基板収納効率が良く省スペースで、メンテナンスや目視確認実施を安全に行える基板収納装置を提供する。
【解決手段】多段の棚状の収納部を備え、任意の対象とする収納部にロボットハンド等の基板搬送装置により基板を一枚づつ一時的に収納・保管・払い出しを行う基板収納装置において、基板の格納/払い出し時に任意の対象とする収納部と該収納部上部の収納部間が開口してロボットハンド等の基板搬送装置がアクセス可能となる機構を備え、且つ、前記収納部のそれぞれは、ロボットハンド等の基板搬送装置と干渉しないスペースに所定の間隔で設けられた基板支持ピンを有する複数本の支持体が側壁フレームに横架され、前記支持体が個別の前記収納部毎に動くことで前記収納部毎の前記支持ピンが上下に可動な機構を備えている。
(もっと読む)
吸着装置および液滴吐出装置
【課題】ワークの裏面の擦り傷を防止し、また、静電気の発生を抑制する吸着装置および液滴吐出装置を提供する。
【解決手段】平坦面10aを有しワークを吸着する吸着穴11が設けられたステージ10と、ステージ10の吸着穴11に接続され負圧を発生させる減圧ポンプ15と、環状の無終端となる多孔質ベルト21が駆動ローラー25と従動ローラー26とに掛け渡されたベルト駆動装置20と、を備え、駆動ローラー25と従動ローラー26との間にステージ10が配置され、ワークの搬送方向と同じ方向に多孔質ベルト21が駆動可能であり、多孔質ベルト21がステージ10に吸着され、多孔質ベルト21を介してワークがステージ10に吸着される。
(もっと読む)
露光現像システム
【課題】 露光現像システムの故障時の処理量の低下を抑えることと、投資効率の低下を抑えることを両立する。
【解決手段】 基板上に感光性の材料を塗布して膜を形成する塗布装置と、前記基板の上に形成された前記膜を露光する露光装置と、露光した前記膜を現像する現像装置とを、それぞれ複数台有する露光現像システムであって、前記露光装置は、あらかじめ用意された描画データに基づく数値制御により前記膜に照射する光のパターンを生成する装置であり、前記塗布装置、前記露光装置、および前記現像装置の稼働状況に応じて、前記基板を前記塗布装置から前記露光装置へ搬送するときの前記塗布装置と前記露光装置との組み合わせ、および前記基板を前記露光装置から前記現像装置へ搬送するときの前記露光装置と前記現像装置との組み合わせを制御する露光現像システム。
(もっと読む)
基板処理装置、ストッカー装置および基板収納容器の搬送方法
【課題】大型化を抑制しつつ基板処理のスループットを十分に向上させることができる基板処理装置、ストッカー装置および基板収納容器の搬送方法を提供する。
【解決手段】基板処理装置においては、ストッカー装置、インデクサブロック、処理ブロックおよびインターフェースブロックがこの順で並ぶように配置される。ストッカー装置は、複数の基板を収納するキャリアFを載置可能な複数のオープナーを有する。ストッカー装置にキャリアFが搬入される。ストッカー装置においては、搬送装置200により複数のオープナーの間でキャリアFが搬送される。搬送装置200は、キャリアFを保持可能に構成され、水平方向および上下方向に移動可能な第1および第2のハンド230,240を有する。第2のハンド240は第1のハンド230の下方に設けられる。
(もっと読む)
自動位置ずれ補正方法、及び自動位置教示方法。
【課題】
フィンガ部が水平面内で回転方向にずれて取り付けられていても、最適な位置教示データが自動で取得できる位置教示方法を提供する。フィンガ部の位置ずれ量を検出して、このずれ量を補正して、最適な位置に被搬送物を搬送できる位置教示方法を提供する。
【解決手段】
搬送ロボットが移動可能なX軸方向に対し平行に備えられた第1、第2の目的物を検出することで搬送ロボットの中心位置を特定し、その後、第3の目的物を検出する。これらの動作で得られた位置データから最適な搬送位置を自動で教示する。
(もっと読む)
基板搭載方法および基板取出方法
【課題】基板搬送装置への基板の搭載および基板搬送装置からの基板の取り出しを自動化する。
【解決手段】ロボットアーム11の先端に取り付けられた基板ハンドリング装置10を使用して基板搬送装置13へ基板21を搭載する方法であって、基板21を立てた状態で保持した基板ハンドリング装置10を基板搬送装置13の挿入する工程と、基板ハンドリング装置10を基板搬送装置13の基板保持枠27に向けて前進させる工程と、基板ハンドリング装置10を傾ける工程と、基板ハンドリング装置10のロック機構17を解除する工程と、基板21の底部付近を基板保持枠27に押し付ける工程と、基板21を基板保持枠27に押し付けたまま降ろして基板21の荷重を基板保持枠27に移す工程と、基板21を垂直に立てて基板保持枠27でクランプする工程と、基板ハンドリング装置10を基板保持枠27から離間させる工程とを有する。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて移載装置のコストを低減する。
【解決手段】搬送車システム1は、軌道3と、搬送車5と、バッファ9とを備えている。軌道3は、複数の処理装置2に沿って設けられている。搬送車5は、軌道3を走行して物品を搬送する。バッファ9は、軌道3の側方に配置され、ローラコンベア63からなる載置面を有する。搬送車5は、支持台としてのローラコンベア39と、プッシュプル移載装置41とを有している。ローラコンベア39は、バッファ9のローラコンベア63と同一高さの支持面を有する。プッシュプル移載装置41は、物品を押し引きすることでバッファ9と搬送車5との間で移動させる。
(もっと読む)
121 - 140 / 744
[ Back to top ]