
Fターム[5F031PA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 特殊目的 (8,207) | 工程管理,生産管理 (1,703) | 搬送の制御 (1,015)
Fターム[5F031PA02]の下位に属するFターム
処理部への搬出入のタイミングを制御 (149)
処理装置の制御も含むもの (122)
Fターム[5F031PA02]に分類される特許
201 - 220 / 744
基板処理装置及び半導体装置の製造方法
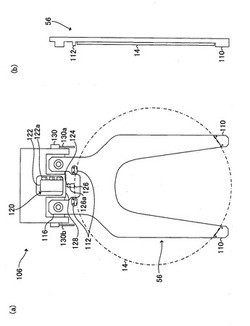
【課題】基板搬送に要する時間を短縮することができる基板処理装置及び半導体装置の製造方法を提供する。
【解決手段】ウエハ14は、先端側へ押し込む把持体126と先端側エッジグリップ110とで挟まれ固定される固定位置で保持される。ウエハ14がツイーザ56上にある移載工程において、ウエハ14は毎回同じ位置である固定位置に保持されるため、ツイーザ56上での位置ずれが矯正される。また、ツイーザ56上でウエハ14が挟まれるようにして保持されているため、ツイーザ56上のウエハ14の移動や落下等を防止でき、搬送動作速度を上げることが可能となる。
(もっと読む)
基板搬送装置

【課題】 本発明は、カセットに収納された半導体ウエハ等の基板を所定の場所に移載する基板搬送装置に関し、カセット内においてウエハが所定位置に位置していない場合にもウエハの外周部を確実に保持することを目的とする。
【解決手段】 基板の下面の外周部を保持する保持部をハンド部に備え前記基板を搬送する搬送手段と、前記ハンド部に設けられ、カセットに水平に収容される基板の奥行き方向の位置を検出する検出手段と、前記奥行き方向の位置に基づいて前記基板の外周部が前記保持部に保持されるように前記搬送手段を制御する制御手段とを有することを特徴とする。
(もっと読む)
基板処理装置、基板処理方法及び記憶媒体
【課題】キャリアから処理ブロックに基板を搬送する搬送手段を備えた基板処理装置において、前記搬送手段の搬送工程数の上昇を抑えてスループットを向上させることができる基板処理装置を提供すること。
【解決手段】処理ブロックに基板を搬入するための第1の受け渡しモジュールに基板を搬送できるときにはバッファモジュールを介さずにキャリアから第1の受け渡しモジュールへ基板を前記搬送順で搬送し、前記キャリアから基板をその第1の受け渡しモジュールに搬送できないときに、前記搬送順とは逆順でキャリアからバッファモジュールに基板を搬送し、前記バッファモジュールに搬送された基板を、その基板に先行して前記第1の受け渡しモジュールに搬送されるように設定された基板が全て当該第1の受け渡しモジュールに搬送された後に、前記搬送順で第1の受け渡しモジュールに搬送するように搬送手段の動作が制御される。
(もっと読む)
基板処理装置、基板処理方法及び記憶媒体
【課題】処理ブロックにて処理済みの基板をキャリアへ搬送する搬送手段を備えた基板処理装置において、前記搬送手段の搬送工程数の上昇を抑えてスループットを向上させること。
【解決手段】処理ブロックから基板を搬出するための第2の受け渡しモジュールに基板があり、その基板を格納するキャリアがキャリア載置部に載置されていない場合には、第2の受け渡しモジュールの基板をバッファモジュールに搬送し、第2の受け渡しモジュールに基板があり、その基板を格納するキャリアが前記キャリア載置部に載置されている場合には、バッファモジュールにてそのキャリアに搬送される基板の有無にかかわらず、第2の受け渡しモジュールにある基板を前記キャリアに搬送することで、キャリアとバッファモジュールと第2の受け渡しモジュールとの間で基板を搬送する搬送手段の搬送工程数を抑え、スループットの低下を抑えることができる。
(もっと読む)
基板の微粒子なしハンドリングのためのデバイス
本発明は、クリーンルーム条件下のミニエンバイロンメント内でのマイクロ技術による基板の微粒子なしハンドリングのためのデバイスに関する。摩擦なし、したがって、微粒子なしで働く基板のハンドリングデバイスを提供することが本発明の課題である。本発明によれば、いくつかの自由度がデバイスのために設計され、それにより、少なくともx軸、y軸、z軸、およびφ方向が、磁気的にかつ非接触で支持され、かつ/または、誘導され、それにより、軸および方向のそれぞれの支持および駆動が、非接触で電磁的に実行され、支持および駆動のためのエネルギーの伝送が非接触で実行される。少なくとも1つの能動コンポーネント3および少なくとも1つの受動コンポーネント2が設計され、それにより、可動の能動ユニット3が、磁石軸受け4、5によって固定受動コンポーネント2において懸垂保持しながら誘導され、それにより、能動コンポーネント3と共に動くドライブモータ7が、電磁結合を通じてエネルギー供給部に接続される。  (もっと読む)
(もっと読む)
太陽電池の輸送
基板用輸送システムであって、基板をその上で受け取るための少なくとも1本のベルトと、ベルト上に離間距離で配置される保持器であって、その離間距離が少なくとも基板の幅と同程度に幅広く、基板が保持器にぶつかるときに、基板が摺動するのを妨げるのに十分である、ベルト上方の隆起まで上昇する保持器と、ベルトを移動するためのモータと、ベルトが加速するよりもベルトが速く減速するように、ベルトの非対称な加速および減速を提供し、それによって連続する加速サイクルおよび減速サイクルを通して保持器に対して基板を位置合わせするための運動コントローラとを有する輸送システム。 (もっと読む)
搬送システムと搬送指令の転送方法
【課題】搬送車システムに異常がある場合の無駄な通信を減らし、かつ搬送要求を実行不能とするまでの処理を簡単化する。
【解決手段】上位コントローラに、走行ルートを構成する部分ルートの接続関係と、各部分ルートの走行の可否とを記憶するための記憶部とを設ける。記憶部のデータから、搬送要求を実行するために必要な部分ルートと部分ルートの走行の可否とを求めて、搬送要求の内で実行可能な搬送要求のみを下位コントローラへ送信する。
(もっと読む)
浮上装置
【課題】ワーク中央領域に搬送方向への空気流が当たることを回避しつつ、ワークの浮上と搬送の両者を良好に行うことができる浮上装置を提供する。
【解決手段】浮上装置11は、浮上ユニット10Mと、その両側にそれぞれ配置された浮上ユニット10A、10Bと、を有する。浮上ユニット10Aは、正圧室を形成するチャンバー36と、チャンバー36の天井壁に固定されワーク搬送面を上面に形成する多孔質板76と、チャンバー36のサイド側であって浮上装置11のサイド側に設けられたサイド搬送部80Aと、を備えている。チャンバー36の天井壁には、溝部と、溝部の溝底を貫通し正圧室と連通する通気孔と、が形成されている。サイド搬送部80Aには、ワーク搬送方向斜め上方に気体を噴き出す気体噴出ノズル90が配置されている。浮上ユニット10Bも同様の構成である。
(もっと読む)
ウエハ搬送方法およびウエハ搬送装置
【課題】 半導体ウエハが収容された状態で意図せず乾燥してしまうことを防止することが可能なウエハ搬送方法およびウエハ搬送装置を提供すること。
【解決手段】 コンベア1によって搬送されるウエハWfを収容カゴ3に収容する、ウエハ搬送方法であって、コンベア1によって鉛直方向と異なる方向に搬送されるウエハWfを、方向転換器2によってその面内方向が鉛直方向に沿い、かつ鉛直方向下方に進行するようにウエハWfの進行方向を転換した後に、ウエハWfを、液体Lq中に配置されかつ鉛直上方に開口する収容カゴ3に収容する。
(もっと読む)
自動搬送の制御システム
【課題】半導体製造工程のロット搬送において、搬送時間が搬送要求発生時点での台車所在に依存することなく搬送時間を一定時間以下に保証する。
【解決手段】ロットおよび設備の稼働状況を収集管理する生産管理部102、設備の詳細情報を管理する設備情報収集部103、将来の生産計画を算出する生産計画算出部104、搬送システム107への動作指示を出すとともに、搬送システム107からの動作情報を収集管理する搬送機器制御部105および前述の各部より必要なデータを収集し搬送システム107内の台車数配分を計算し搬送機器制御部105に指示する台車配分計算部106からなる管理部100を搬送システム107に接続する。それにより従来技術で問題になっていた、搬送開始時の搬送機器の所在分布や搬送パターンに依存する搬送時間のブレを削減することができる。
(もっと読む)
半導体製造装置の制御システムおよび制御方法
【課題】複数の処理チャンバを備える半導体製造装置に対して最適なウェーハ搬送制御処理を実現し、半導体製造のリードタイムを短縮して効率性を高めることができる半導体製造装置の制御システムおよび制御方法を提供する。
【解決手段】半導体ウェーハをロット単位で処理する半導体製造装置の処理動作を指示する処理指示装置10の搬送制御判断部12は、装置状態データ収集部11、ロット処理データ収集部14および搬送制御データベース13から取得した、装置状態データ、在庫ロット数、ウェーハ処理時間、ロット間クリーニング時間およびウェーハ搬送制御内容を示すデータに基づいて、ウェーハ搬送制御内容ごとに全在庫ロットの平均リードタイムを算出する。搬送制御判断部12は、算出結果から最適なウェーハ搬送制御内容を選択し、処理指示部15が選択されたウェーハ搬送制御内容に従うウェーハ搬送を半導体製造装置16に実施させる。
(もっと読む)
基板処理装置
【課題】 各処理ユニットの配置に基づいた搬送順に制限されることなく、所望の処理順で基板を処理することができる基板処理装置を提供する。
【解決手段】 基板処理部20は、複数の処理ユニットU1〜U3を有している。各処理ユニットU1〜U3間の基板搬送としては、平流し方式が採用されており、基板は、各処理ユニットU1〜U3の配置に基づいた搬送順で、各処理ユニットU1〜U3に受け渡される。メインコントローラは、各処理ユニットU1〜U3に対し、少なくとも処理ユニットU2による処理を含む一連の第1基板処理を実行させる。続いて、メインコントローラは、各処理ユニットU1〜U3に対し、少なくとも処理ユニットU1による処理を含む一連の第2基板処理を実行させる。
(もっと読む)
搬送方向転換装置及び浮上搬送システム
【課題】基板を第1搬送方向へ浮上搬送して、第2搬送方向へ浮上搬送する搬送時間を短縮すること。
【解決手段】各第1方向転換用ローラケース内に第1方向転換用ローラ63が第2搬送方向D2に平行な軸心周りに回転可能に設けられ、各第2方向転換用ローラケース内に第2方向転換用ローラ75が第1搬送方向D1に平行な軸心周りに回転可能に設けられ、各第1方向転換用ローラ63及び各第2方向転換用ローラ75の高さ位置が基準の浮上高さ位置よりも低くなっていること。
(もっと読む)
基板昇降移送装置及び基板処理移送システム
【課題】基板昇降移送装置7の平面スペースを十分に削減して、工場のスペースの有効利用を図ること。
【解決手段】第1基板処理装置3の一側に第1姿勢切替用保持具37を備えた第1姿勢切替部材29が水平な軸心周りに揺動可能に設けられ、第2基板処理装置5の一側に第2姿勢切替用保持具49を備えた第2姿勢切替部材41が水平な軸心周りに揺動可能に設けられ、第1姿勢切替部材29の一側に立設した支持フレーム53に上下方向へ延びた無端状部材63が循環走行可能に設けられ、無端状部材63に複数の昇降用保持具69が周方向に間隔を置いて設けられたこと。
(もっと読む)
一時的なウェハーボンディング及びデボンディングのための改善された装置
一時的なウェハーボンディングのための改善された装置が一時的なボンダークラスター及びデボンダークラスターを備える。一時的なボンダークラスターは、接着剤層によるボンディング、接着剤層とリリース層との組み合わせによるボンディング及びUV光硬化性接着剤層とレーザー吸収リリース層との組み合わせによるボンディングを含む電子ウェハーボンディング工程を行う一時的なボンダーモジュールを備える。デボンダークラスターは、熱摺動デボンダー、機械的デボンダー及び照射デボンダーを備える。 (もっと読む)
基板処理装置および基板搬送方法
【課題】複数の基板処理部が搬送路に沿って配列されている場合でも、基板搬送時間の増加を抑制または回避することができる基板処理装置および基板搬送方法を提供すること。
【解決手段】基板処理装置1は、複数の処理ユニット6と、シャトルSTと、メインロボットMRと、MR移動機構7と、シャトル移動機構とを含む。複数の処理ユニット6は、それぞれ基板Wを1枚ずつ処理するためのものであり、搬送路C1に沿って配列されている。また、シャトルSTは、基板Wを待機させておくためのものであり、搬送路C1に沿って移動可能に設けられている。また、メインロボットMRは、シャトルSTと各処理ユニット6との間で基板Wを搬送するためのものであり、搬送路C1に沿って移動可能に設けられている。シャトル移動機構は、搬送路C1に沿ってシャトルSTを移動させる。また、MR移動機構7は、搬送路C1に沿ってメインロボットMRを移動させる。
(もっと読む)
基板処理装置
【課題】 基板の搬送処理を良好に実行できる基板処理装置を提供する。
【解決手段】 制御部25、45は、それぞれ基板搬送ユニット20、40により実行される搬送処理を制御する。制御部30、50は、それぞれ処理ユニットC00〜C08、および処理ユニットC09〜C15で実行される基板処理を制御する。制御部25、45は、基板の受け渡しと略同期して受け渡された基板情報データ60の処理フローデータに基づいて、次に搬送すべき処理ユニットC00〜C15を決定する。
(もっと読む)
ウェーハ検出機構、及びFOUP
【課題】FOUPの蓋部を開けることなくFOUP内のウェーハに対する検出処理を適切に行うことができるとともに、ウェーハの損傷を防止しつつ構造の簡素化を図ることが可能なウェーハ検出機構を提供する。
【解決手段】開閉可能な蓋部12を有するFOUP1の内部に高さ方向へ複数段に亘って収容したウェーハWに対して検出を行うウェーハ検出機構Xを、蓋部12に設けた各ウェーハWのエッジを保持し得るリテーナ12Bと、リテーナ12Bの弾性変形又は移動を検出することでウェーハWの少なくとも有無を検出する検出部Sとによって構成した。
(もっと読む)
センサキャリアにより基板処理システム内の物体の位置を自動的に測定して教示する方法および関連するセンサキャリア
本発明は、センサキャリア(1)がロボットエンドエフェクタ(24)により移動する、基板処理システム(20、26)内の物体(11)の位置を自動的に測定して教示する方法に関する。センサキャリア(1)のセンサユニット(2、3、4、5a、5b)は、物体(11)の縁部(10a、10b)を横切って移動直線(B1、B2、B3)に沿って移動し、センサユニット(2、3、4、5a、5b)のそれぞれは、縁部(10a、10b)の検出時に値を変更する少なくとも1つのセンサ信号を出力する。各移動直線(B1、B2、B3)に沿った信号変更の位置から、物体(11)の位置が決定される。さらに、本発明は、本発明による方法を実行する、基板のような可動式無線センサキャリアに関し、センサキャリアは、キャリア板(1a)と、キャリア板(1a)上に取り付けられ、物体表面(13)に垂直な移動直線(B1)上でのセンサキャリア(1)の移動中、物体(11)の第1の物体縁部(10a)および第2の物体縁部(10b)を検出するように構成された少なくとも1つの第1のセンサユニット(4、5a、5b)と、キャリア板(1a)上に取り付けられ、物体表面(13)に平行な移動直線(B2)上でのセンサキャリア(1)の移動中、物体(11)の少なくとも第1の物体縁部(10b)を検出するように構成された少なくとも1つの第2のセンサユニット(2、3)とを有する。  (もっと読む)
(もっと読む)
基板処理装置および基板受渡方法
【課題】スループットの向上を図ることができる、基板処理装置および基板受渡方法を提供する。
【解決手段】ハンド9の上下面に、それぞれウエハWを保持するための4つの支持突起23および4つの挟持部材24が備えられている。そのため、次の4つの動作ステップ1〜4で、ハンド9によるスピンチャックに対するウエハWの受け取りおよび受け渡しが達成される。
1.4つの支持突起23にウエハWが保持されている状態で、ハンド9がスピンチャックと対向する位置に進出される。
2.スピンチャックに支持されているウエハWが4つの挟持部材24により保持されて、スピンチャックから4つの挟持部材24にウエハWが受け取られる。
3.4つの挟持部材24によるウエハWの受け取りに前後して、4つの支持突起23からスピンチャックにウエハWが受け渡される。
4.ハンドがスピンチャックと対向する位置から退避される。
(もっと読む)
201 - 220 / 744
[ Back to top ]