
Fターム[5H004GA09]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 機械的振動の防止 (64)
Fターム[5H004GA09]に分類される特許
1 - 20 / 64
駆動システム及び駆動方法、並びに露光装置及び露光方法
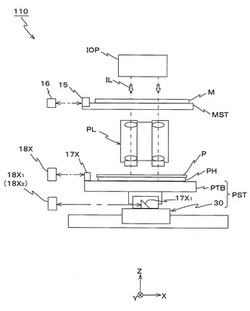
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
移動体の動作制御装置及びこれを用いたスロッシング制御装置

【課題】 移動体の状態を反映する画像情報をもとに、特徴量を抽出する手法を用いることはなく移動体を的確に制御することを可能にする移動体の動作制御装置を提供する。
【解決手段】 水を収容した水槽10と、水槽10を一方向に往復動させる駆動部12と、水槽10を視認するカメラ14と、カメラ14により取得された画像情報に基づき駆動部12により水槽10を制御して水槽10内の水を揺動状態から静止状態へ整定する制御部16とを備えるスロッシング制御装置であって、制御部16は、カメラ14から所定周期にしたがって順次取り込まれる水槽10中の水の画像情報を、数ベクトル空間を除くヒルベルト空間における1点と解釈して、安定化制御方法により、水槽10内の水を揺動状態から静止状態へ整定するようにモータ12を制御することを特徴とする。
(もっと読む)
差し迫った制御不安定性の検出
【課題】対象物に刺激を与えるシステムにおいて、差し迫った制御不安定性を検出してこれを回避する方法を提供する。
【解決手段】システム110は、刺激エフェクター120により対象物100に刺激が与えられている間にセンサー130により対象物の発振を示すシステムパラメータを表すパラメータ信号OSCを測定する。制御装置140はパラメータ信号の選択された周波数帯における支配的なトーンの最大振幅を監視し、最大振幅が指定された期間にわたって持続する場合、制御不安定性を回避する信号CSを刺激エフェクター120に与える。
(もっと読む)
制振制御装置、制振制御方法およびコンピュータプログラム
【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
プログラム、記録媒体、サーボドライバの制振制御の設定装置および設定方法
【課題】サーボドライバの制振制御の設定におけるユーザの作業性を向上させることを可能にする技術を提供する。
【解決手段】制振制御のパラメータを設定するためのプログラムが提供される。プログラムは、サーボモータの試運転のための運転パラメータを受付ける第1の入力部41と、サーボモータを試運転させるための要求を受付ける第2の入力部42と、制振制御を設定するための制御パラメータを受付ける第3の入力部(制振制御設定部50)とを有する設定ウィンドウW1を、表示装置の画面に表示させる。ユーザは、サーボモータのテスト運転および制振制御の設定を1つのウィンドウ(サブウィンドウW1)の中で行なうことができる。
(もっと読む)
制振装置
【課題】適応フィルタの発散を抑制して制振制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させた制振装置を提供する。
【解決手段】発散抑制モードにおいて、評価振動を構成する相殺振動(Vi4r+Vi4i)と所望の相殺振動Vi4iとの位相差βを低減して、適応フィルタ32fの算出が発散することが抑制される。そして、予め定めた伝達特性の位相成分を補正する場合に、位相成分の補正に起因して適応フィルタが発散するおそれのある通常モードから適応フィルタの発散を抑制する発散抑制モードに切り換えて、発散抑制モードにおいて位相成分の補正を実施するので、伝達特性を補正することによって補正後の伝達特性と現実の伝達特性との位相差が著しくかけ離れる場合であっても、適応フィルタの発散を抑制して制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させることが可能となる。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
ボールねじ装置の駆動制御装置及び駆動制御方法
【課題】 ボールねじ装置の共振を良好に抑制する。
【解決手段】 ボールねじ装置は、ボールねじを回転させて移動体を移動させるためのモータ11を備えている。モータ11は、駆動制御装置により駆動制御される。駆動制御装置は、ボールねじの長さに応じてボールねじの長さに固有のボールねじ装置の共振周波数を決定する共振周波数決定部33と、モータ11を駆動制御するための駆動制御信号から決定された共振周波数に対応した周波数成分を除去するフィルタ部37とを備えている。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
適応ノッチフィルタ及びそれを用いた共振抑制装置
【課題】小さい演算負荷で自動的に中心周波数を更新することができる適応ノッチフィルタ及びそれを用いた共振抑制装置を提供する。
【解決手段】適応ノッチフィルタ10は、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するよう構成されており、中心周波数を変更可能であるノッチフィルタ12と、入力信号の周波数と中心周波数の現在値との大小関係に対応する位相特性を有し、制御入力を生成するための信号を入力信号とする位相差フィルタ16と、大小関係に応じて中心周波数修正量の平均値の符号が決定されるように位相差フィルタ16の入力信号及び出力信号を用いて定義された中心周波数修正量を演算し、該中心周波数修正量に基づき中心周波数を更新する修正演算部18と、を備える。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の周波数を実際の周波数と異なる周波数であると誤認識した場合であっても疑似振動の周波数を制振すべき振動の周波数に合わせて適応制御アルゴリズムの適応性を向上させ、制振性および安定性を向上させた制振装置を提供する。
【解決手段】適応制御アルゴリズムを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、発生した相殺振動Vi4と振動Vi3との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて周波数認識手段31により認識された周波数を位相差が無くなる方向へ補正する周波数補正手段35とを有している。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動と基準波との間の位相ズレを低減して、適応フィルタの算出時における制振安定性を向上させるとともに、制御の応答性や制振効果を向上させた制振装置を提供する。
【解決手段】適応フィルタ32fを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて相殺振動Vi4を制振すべき位置に発生させる指令たる相殺信号を生成する。そして、振動Vi3と相殺振動Vi4との相殺誤差として検出された振動と適応フィルタ32fの基準波とに基づいて相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて適応フィルタ32fの基準波の位相を補正する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の著しい変化に起因して発生させる相殺振動を大きく変化させる必要がある場合に対応して制振制御の応答性を向上させた制振装置を提供する。
【解決手段】振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、制振すべき位置において振動Vi3と相殺振動Vi4との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、振動Vi3と疑似振動Vi3’に基づき制振すべき位置に発生される相殺振動Vi4との偏差に対応する偏差情報を取得し、取得した偏差情報に基づいて偏差の増加に応じて適応フィルタ32fが収束する速度が速まるように収束係数32uを変更する。
(もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
制御ロジック及びフィードバック制御方式
【課題】幅広い振動数帯域において振動低減効果を有する制御ロジック及びフィードバック制御方式を提供する。
【解決手段】畳み込み積分を含みフィルタ係数を更新する制御ロジックにおいて、入力信号として、エラー信号のみを用い、フィルタ係数の更新式を次式
【数1】
のようにして制御を行うことで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。前記制御ロジックによりフィードバックゲインをサンプリング時間ごとに修正することで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。
(もっと読む)
回転機械
【課題】運転範囲内における動翼の振動応答を低減できる回転機械を提供すること。
【解決手段】この回転機械1は、ロータ5を回転させて動力を発生する回転機械である。この回転機械1では、ロータ5の回転数に応じて共振が発生する領域を共振回転数領域と呼ぶときに、この共振回転数領域にてロータ5の回転数を増減させる回転数増減手段7が設けられている。例えば、この回転数増減手段7が空気量制御あるいは燃料量制御によりロータ5の回転数を制御している。
(もっと読む)
アクティブフィードバック制御装置、方法、及びプログラム
【課題】制御性能を低下させることなく、同定対象の動特性を表わすパラメータを同定対象の動作中にオンライン同定する。
【解決手段】アクティブフィードバック制御装置28は、外乱が入力される制御対象12、制御対象12を駆動するアクチュエータ14、制御対象12の状態を検出するセンサ16を含む同定対象18の動特性を表わすパラメータと、センサ16からの検出信号と、に基づいて、制御対象12が目標の状態となるような制御信号を生成して出力するコントローラ20と、平均値が略ゼロとなる乱数を発生させる乱数発生部22と、コントローラ20から出力された制御信号と、発生させた乱数を制御信号に乗算したノイズ付加制御信号と、を加算してアクチュエータ14に出力する加算部24と、同定対象18の動特性を表わすパラメータを制御対象12の動作中にオンライン同定し、同定したパラメータをコントローラ20に出力する同定部26と、を備える。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
位置決め制御装置の振動抑制制御装置
【課題】フィルタ位相遅れの影響を受けずに振動の抑制を可能とする。
【解決手段】外乱オブザーバ10を用いた加速度制御系を含む位置決め制御装置の振動抑制制御装置において、位置指令の部分に低域通過フィルタ12を挿入し、位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記位置指令部分の低域通過フィルタ12のカットオフ周波数とする。ここで、前記位置指令の部分に加えて、速度フィードフォワード指令の部分にも低域通過フィルタ14を挿入し、前記位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記速度フィードフォワード指令部分の低域通過フィルタのカットオフ周波数とすることができる。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
1 - 20 / 64
[ Back to top ]