
Fターム[5H004HA02]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 流量 (75)
Fターム[5H004HA02]に分類される特許
21 - 40 / 75
雨水排水支援制御装置
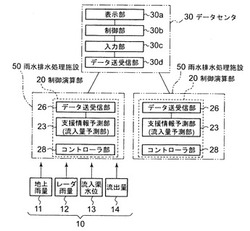
【課題】雨水流入予測を行なうためのデータを逐時取得して、演算処理を行なうことにより逐次的な流入予測を精度よく行なうことができる雨水排水支援制御装置を提供すること。
【解決手段】雨水排水支援制御装置はデータセンタ30と、複数の雨水排水施設50とに配置されている。各雨水排水施設50には各種パラメータを含む予測モデルを有する支援情報予測部23と、データ送受信部26とが設けられている。データセンタ30には、支援情報予測部23の予測モデルのパラメータを調整する予測精度診断機能30fが設けられている。
(もっと読む)
ケミカルループプロセスを制御・最適化するためのシステム及び方法
ケミカルループシステム最適化制御システムは、ケミカルループにおいて1つ以上のパラメータを測定するための1つ以上のセンサを備える。センサはケミカルループ内に位置する導管に又はその内部に設置される。センサは、導管内の固体の量を表す1つ以上のデータ信号を生成する。制御システムは、センサと通信を行うデータ取得システムと、データ取得システムと通信を行う制御部とを備える。データ取得システムはデータ信号を受信し、制御部は制御信号を生成する。制御部は、ケミカルループ内に位置する1つ以上のバルブと通信する。バルブはケミカルループ内の固体の流れを調節するように構成されている。  (もっと読む)
(もっと読む)
流体フロー測定および比例流体フロー制御デバイス

【課題】制限フロー構成要素によって生成される圧力低下に基づいて、フロー速度を測定するための流体フロー測定および制御デバイスを提供する。
【解決手段】本発明のデバイスは、流体入り口および流体出口を有する比例フローバルブ10、ならびにこの比例バルブ10を調節するためのアクチュエータ17を備える。この制限フロー要素15は、この比例フローバルブ10と連絡状態にある流体入り口および流体出口を備え、制限フロー構成要素の流体入り口と出口との間での圧力低下を生成する。このデバイスはまた、圧力低下を測定するための手段24,25、圧力低下に基づいてフロー速度を計算するための手段16、ならびに測定された圧力低下に応じて比例フローバルブ10を通じて流体のフローを制御するために圧力低下測定手段24,25、およびアクチュエータ17と連絡する制御手段(示さず)を備える。
(もっと読む)
先進的プロセス制御(advancedprocesscontrol)と実時間最適化(real−timeoptimization)との経済性に基づく協調
先進的プロセス制御と製造プロセスの実時間最適化とを協調させるためのシステムおよび方法が、提供される。システムおよび方法は、制御され最適化されるべき製造プロセスに対応するプロセスデータおよび経済的データを受け取る。プロセスデータ、経済的データおよびプロセスの非線形定常状態モデルに基づいて、経済的目的関数が、実時間最適化モジュールによって計算される。その後、引き下げられた次数の、経済的目的関数の非線形近似が、実時間最適化モジュールによって計算され、先進的プロセス制御モジュールに送られる。先進的プロセス制御モジュールは、制約された経済最適に向けて製造プロセスを制御するために、引き下げられた次数の、経済的目的関数の非線形近似を使用する。 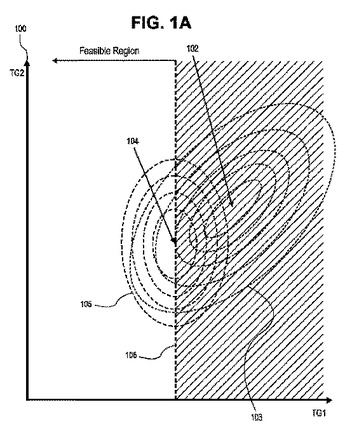 (もっと読む)
(もっと読む)
多段プロセスとその制御
多段プロセスを制御する方法を提供する。本プロセスは、原料から中間製品を生成する複数の第1段階プロセスと中間製品から最終製品を生成する複数の別段階プロセスとを含む。第1段階プロセスは複数の中間プロセスを含み、別段階プロセスは最終製品を生成する複数の最終プロセスを含む。中間制御装置は最終製品EPの1つまたは複数の製品特性に応じて第1段階プロセスを制御し、別の制御装置FCは中間製品の製品特性に応じて別段階プロセスを制御する。多段プロセスは、最終プロセスと中間プロセスのそれぞれにプロセス値を割り当てる工程を更に含む。中間制御装置ICは、最終製品を生成するための全体プロセス値を最適化するように中間プロセスの動作を制御する。最終制御装置FCは全体プロセス値を最適化するように中間制御装置ICの動作に応答する。 (もっと読む)
プロセス制御システムの制御ループタイミングを調整する方法及び装置
【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
プラント最適運転計画装置
【課題】プラントの運転条件の変更に追従した最適な運転計画を立案するとともに、プラントの温度特性を反映したプラント最適運転計画装置を提供する。
【解決手段】
プラントモデルを用いてプラントの運転計画を立案するプラント最適運転計画装置において、前記プラントの状況をリアルタイムに取得する取得部と、前記取得部により取得された前記プラントの状況を前記プラントモデルに適応させることにより、プラントの運転計画をリアルタイムに作成する計画作成部と、前記計画作成部により作成された運転計画を提示する計画提示部と、定義した入力パラメータから前記プラントの設備定格出力を計算するとともに、前記プラントの運転効率補正値を計算し、パラメータ設定シートに出力する設備能力運転効率補正部とを備えることを特徴とする。
(もっと読む)
貯水施設運用支援システム、貯水施設運用支援方法およびプログラム
【課題】無効放流を減らすことができるようにする。
【解決手段】運用計画システム30は、流入量Rm+1を変化させて合計した、m+1月までの累計発電電力量Fm+1の期待値の合計ΣP(Rm+1|Rm)Fm+1(ST,Hm+1,Rm+1)と、m月の水位Hm、その翌月の水位Hm+1、および当月の流入量Rmに基づいて算出されるm月における発電電力量B(Hm,Rm,Hm+1)とを足した値から、m月の無効放流量Smの2乗にペナルティ係数a*を乗じた値を減じて、累積値を算出し、累積値が最大となる水位を決定していく。
(もっと読む)
センサネットワークシステム、データ処理装置、およびデータ処理方法
【課題】省エネを実現するための具体的な指標を算出する。
【解決手段】センサノード20として、当該センサで対象者の状態や動作を示す対象者データを検出して送信する対象者センサノード20Aと、当該センサで対象者の周囲の環境や物の状態を示す環境データを検出して送信する環境センサノード20Bとを備え、データ処理装置10において、制御処理部11により、これらセンサノード20から通信ネットワーク30を介して対象者データ、環境データ、および消費エネルギーデータを、センサデータとして収集し、最適値算出部12により、これらセンサデータに含まれる環境データのうち対象者の周囲の環境や物の状態を制御可能な可制御センサデータについて、これらセンサノードに基づき消費エネルギーデータを最小とする最適値を算出する。
(もっと読む)
センサネットワークシステム、データ処理装置、およびデータ処理方法
【課題】省エネを実現するための具体的な指標を算出する。
【解決手段】センサノード20として、当該センサで対象者の状態や動作を示す対象者データを検出する対象者センサノード20Aと、当該センサで対象者の周囲の環境や物の状態を示す環境データを検出する環境センサノード20Bと、当該センサで対象者が使用する機器で消費しているエネルギーを示す消費エネルギーデータを検出する消費エネルギーセンサノードとを備え、データ処理装置10において、最適センサデータ選択部12により、行動パターンデータベース15に基づいて、制御処理部11で収集した新たな収集センサデータと対応する行動パターンを認識し、認識した行動パターンのうち当該消費エネルギーデータが最小であるセンサデータの組を、対象者の最適行動パターンを示す最適センサデータとして選択する。
(もっと読む)
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する方法および装置
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する例示の方法および装置が開示される。開示された例示の装置は、第1の接続部および電源に連結された第2の接続部を有する位置トランスミッタと、位置トランスミッタの第1の接続部に連結された少なくとも第1の接続部を含む電空コントローラと、電空コントローラの第1の接続部と第2の接続部とを連結するレジスタとを含む。 (もっと読む)
外乱制御装置、外乱制御方法、外乱制御プログラムおよび記録媒体
【課題】多入出力プラントにモデル予測制御を適用した場合においても、外乱抑制性能を向上させ、少ない計算量で低コストに実現でき、ステップ応答試験の結果のみから構成可能であって、且つモデル予測制御の操作量制約を逸脱しないことを可能にする外乱制御装置等を提供する。
【解決手段】制御装置40は、モデル予測制御機能10により計算された制御量予測値y*と多入出力プラント30から出力された制御量信号yとの差である制御量予測誤差eを計算する制御量予測誤差計算部42と、予めモデル予測制御機能10により取得されたステップ応答終端値dPVと制御量予測誤差計算部42により計算された制御量予測誤差eとに基づき外乱推定値d*を計算する外乱推定部44と、外乱推定部44により計算された外乱推定値d*に基づきモデル予測制御機能10により計算された操作量uを修正した修正操作量umodを出力する外乱抑制部46とを備えている。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】制御対象の特性が複雑で情報が不完全なプラントの制御において、制御装置に内包された探索手段により自律的に抽出した、効率的な問題解決のための学習指針を用いることで、望ましい操作方法を制御周期以内で学習可能なプラントの制御装置を提供する。
【解決手段】本制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定するモデルと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、操作方法学習部における学習の制約条件及び学習結果に関する情報を保存する学習情報データベースと、所望のモデル出力が得られる運転条件に相当するモデル入力を探索する最適解探索部と、最適解探索部における探索の制約条件及び最適解探索に関する情報を保存する探索情報データベースとを備え、操作方法学習部は、最適解探索部で得られた最適な運転条件に関する情報を用いてモデル入力を生成する。
(もっと読む)
工場の稼働システムおよび稼働方法
【課題】圧縮空気を消費する複数の生産設備を有する工場に対して、不測の圧力低下を未然に防止し、省エネルギで安定稼働することができる工場の稼働システムを提供する。
【解決手段】工場の稼働システム100は、(a)各生産設備の消費流量の時系列データと各生産設備のタクトタイムとを記憶しているデータベース113と、(b)各生産設備の消費流量の時系列データと各生産設備のタクトタイムとを使用して総消費流量の時系列変化をシミュレートした結果から、総消費流量が閾値以下になる区間の中で最大となる最大稼働有効区間と、最大稼働有効区間において各生産設備の最初と最後のタクト開始時間とを特定する設備稼働スケジュール決定部114と、(c)生産設備105〜107のいずれかを、最初のタクト開始時間で稼働開始させ、最後のタクト開始時間で稼働停止させることを最大稼働有効区間の周期で繰り返し行う設備稼働制御部115とを備える。
(もっと読む)
リアルタイムでの精製所水素ガス供給、分配及び消費の最適化
本発明は、広範囲にわたる水素ガス及び関連する軽質ガスの供給、分配及び使用をモデル化することができるように基本制約を取り込み、動的過程を処理し、及び構造を制御する革新的な独自の数理モデルに関する。本発明はまた、精製所における水素及び関連する軽質ガスの供給及び分配、及びそれにより消費を効率的に最適化するための、前記モデルを用いて目的関数の解を求めるリアルタイム最適化(RTO)コンピュータアプリケーション、並びにそれを使用した方法及び精製所にも関する。目的関数は、水素供給及び分配コストの最小化、又は水素システム内の水素消費部によって作られる製品の評価額から対応する水素供給及び分配コストを差し引いたものに基づく収益の最大化などの、経済的目的関数であってもよい。 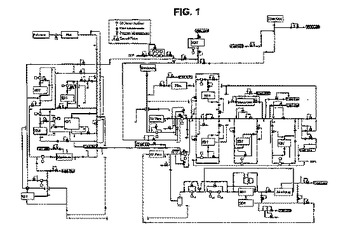 (もっと読む)
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、複数のゾーンZ1,Z2のうち予め規定されたゾーンの制御の整定状態を検出したときに、整定時の各ゾーンZ1,Z2の操作量MV1,MV2と整定時の操作量総和MV_allとの比に応じて、予め規定された操作量総和下限値OL_allを各ゾーンに配分し、この配分した値を各ゾーンの操作量下限値OL1,OL2とする下限値配分部32−1,32−2とを備える。
(もっと読む)
質量流量コントローラのシステムおよび方法
【課題】質量流量コントローラの製造中に使用されたものと異なる流体および/動作条件で動作するように質量流量コントローラを構成する方法を提供する。
【解決手段】さまざまな異なるタイプの流体および動作条件の下で一定の制御ループ利得を有するように質量流量コントローラを制御し、質量流量コントローラの製造中に使用されたものと異なる流体および/動作条件で動作するように質量流量コントローラを構成するシステムおよび方法。さらに、このシステムおよび方法には、非動作信号をソレノイド作動装置に供給することによってソレノイド作動装置のヒステリシスの影響を減らすことによって制御を提供することが含まれる。
(もっと読む)
プラント運転システム
【課題】
複数の入力項目と複数の出力項目を有するプラントを対象として、トレードオフの関係にある出力項目の値を考慮した操作量を迅速に決定できるプラント運転システムを提供する。
【解決手段】
複数のプラントの出力項目のそれぞれについて出力許容範囲を設定する出力許容範囲設定部82と、全ての出力項目の値が出力許容範囲設定用図形86で設定した出力許容範囲内となるプラントの操作項目の操作量の組合せである許容操作量を求める許容操作量取得部52と、許容操作量の値、又は許容操作量の値の存在範囲を画面に表示する許容操作量表示部54と、許容操作量に対応する出力項目の値を画面にグラフ表示する出力項目グラフ表示部56と、を備えた。
(もっと読む)
プラントの制御装置
【課題】 偏差に基づく補償動作の遅れを補い、目標値の変動に遅れなく追従し、応答性を向上させる。
【解決手段】 設定された目標値と制御量との偏差に基づいて、フィードバック制御するプラントの制御装置30であって、バルブ13に入力されるバルブ開度Vと制御対象から出力される流量fとの入出力特性をあらかじめ記憶し、この入出力特性に基づき、目標値に対応するバルブ開度Vを特定するとともに、目標値が変動するタイミングにおいて、変動する目標値から特定されるバルブ開度Vをバルブ13に入力するフィードフォワード制御手段と、を備える構成としてある。
(もっと読む)
プラント制御装置、プラント制御方法、プラント制御プログラム、および、そのプログラムを記録した記録媒体
【課題】運転状態が大きく変動する場合でも熟練を要さずに安定した良好な運転状態に制御できるプラント制御装置を提供する。
【解決手段】運転内容変更認識手段343により運転内容がナフサを処理する定常運転である場合、状態制御手段342にてセンサ400で検出した運転状態データを第一目標値にするPID制御をする。コーク除去の非定常運転の場合、付加制御手段344は、状態制御手段342にてセンサ400で検出した運転状態データを第二目標値にするPID制御か、状態制御手段342にて制御する制御量に制御量データの値を加算させてPID制御を実施させる。
(もっと読む)
21 - 40 / 75
[ Back to top ]