
Fターム[5H004HA07]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 変位、角度、位置、方向、姿勢 (358)
Fターム[5H004HA07]に分類される特許
101 - 120 / 358
モータ制御装置及び制御方法
【課題】 いかなる条件でサーボシステムが不安定になった場合にも発振して暴走するような危険な状態を回避することができるモータ制御装置及び制御方法を提供する。
【解決手段】 駆動系の発振状態を検出する発振検出部103と、トルク指令urefを予め設定したリミット値TLIMT以下に制限するリミット演算部5と、発振検出部103が発振を検知して発振中であると判断している間のみ、トルク指令urefをリミット演算部5を介して出力する切り替えスイッチ1、及び積分制御器3への入力をオフとする切り替えスイッチ2とを備えた。
(もっと読む)
車両の制御装置

【課題】ダイナミクスを考慮したモデリングを可能にして推定精度を向上させると共に、限られたメモリ容量しか実装できない車両へのJITモデリングの適用を可能にするようにした車両の制御装置を提供する。
【解決手段】車両の運転を示すパラメータ群を計測し(S10)、計測されたパラメータ群を入力とし、対応して設定された出力と共に入力データuDB(i)、出力データyDB(i)として時系列に従って蓄積して蓄積データを得(S12)、入力に対して時刻tのときのモデルを同定するための要求点を設定し(S14)、設定された要求点と蓄積入力との距離を過去の入力も含めて求めて類似度を算出し(S16)、蓄積データから距離が小さいデータの集合を探索して近傍のデータとして決定し(S18)、それに含まれる出力データから推定出力を算出し(S20)、それに基づいて車両の運転を制御する(S22)。
(もっと読む)
産業機械
【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
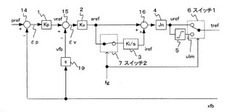
位置決め制御装置及びレーザ加工機
【課題】
位置決め時間を短くする位置決め制御装置を提供する。
【解決手段】
モータの位置決め制御を行う閉ループ制御系の位置決め制御装置100であって、モータの目標位置が入力される目標位置入力ブロック1と、モータの実位置及び実速度をフィードバックして、目標位置入力ブロック1に入力された目標位置とモータの実位置との偏差に応じた第一の目標指令信号を生成する制御則A(17a)と、モータの実位置及び実速度をフィードバックして、目標位置とモータの実位置との偏差に応じた第二の目標指令信号を生成する制御則B(17b)と、目標位置に応じて、第一の目標指令信号と第二の目標指令信号とのいずれかをモータに入力するように切り替えるスイッチブロック5とを有し、制御則A及び制御則Bは、閉ループ制御系の極配置が互いに異なるように設定されている。
(もっと読む)
自走式移動体の制御システム
【課題】実時間制御において、複合的な目的を達成するとともに作業時間を短縮することが可能な自走式移動体の制御システムを提供する。
【解決手段】自走式掃除機100の制御システム1は、変位可能な本体110と、本体110に取り付けられ、本体110に対して変位可能なアーム120と、本体110を駆動するための車輪駆動用モータユニット133と、アーム120を駆動するための第1のサーボ127と第2のサーボ128と、コンピュータ200とを備え、コンピュータ200は、本体110の変位に関する因子とアーム120の変位に関する因子との両方の因子に基づいて本体110の挙動とアーム120の挙動とを評価する評価関数を利用して、本体110の挙動とアーム120の挙動とを制御するように車輪駆動用モータユニット133と第1のサーボ127と第2のサーボ128とを最適制御する。
(もっと読む)
機械制御装置
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
サーボ解析機能を備えたシミュレーションシステム
【課題】シンボリックなモデルでシミュレーション可能なシミュレーションソフトとAD、PWM等を接続し、実機作動が可能なリアルタイムシミュレータに組み合わせることにより、容易に制御器の周波数応答等伝達関数を計測可能にするサーボ解析機能を備えたシミュレーションシステムを提供すること。
【解決手段】サーボ解析機能を備えたシミュレーションシステムは、制御器と等価な応答を実時間で演算して出力するモデルベースなリアルタイムシミュレータ1を備え、リアルタイムシミュレータ1を実機からなるモータ5(制御対象)に接続し、制御シミュレーションを行うシミュレーションシステムにおいて、リアルタイムシミュレータ1のモデル内に伝達関数計測ブロックモデル100を配置して構成される。
(もっと読む)
半導体装置および撮像装置
【課題】低コスト化を図るとともに、駆動電流制御の精度の向上を図ることが可能な半導体装置および撮像装置を提供する。
【解決手段】半導体集積回路101は、駆動電流値を示す複数ビットの駆動データのうち、最上位ビットまたは最上位ビットから連続する複数のビットである上位データに基づいて第1の駆動電流を生成し、負荷に供給する第1の駆動電流生成部21Aと、駆動データのうち、最下位ビットまたは最下位ビットから連続する複数のビットであり、かつ少なくとも駆動データのうちの上位データ以外のすべてのデータを含む下位データに基づいて第2の駆動電流を生成し、負荷に供給する第2の駆動電流生成部21Bとを備える。
(もっと読む)
モータ制御装置
【課題】 フィードバック制御系のサンプリング速度とモデル制御系のサンプリング速度との差に起因する影響を、従来よりも少ない演算量で抑制して、モデル追従制御を実施できるモータ制御装置を提供する。
【解決手段】 速度制御器115は、モデル制御系105のサンプリング速度の遅れに相当する伝達関数を有するローパスフィルタ113と、速度積分器117を含む積分制御系116と、比例制御系118と、速度比例ゲイン乗算部119とを含んでいる。積分制御系116は、加算部SP2によって加算された速度指令とモデル速度指令とを合算した指令から、ローパスフィルタ113から出力された遅延速度情報を減算部SP4で減算した指令を、速度積分器117に入力する。
(もっと読む)
粘性摩擦同定装置を備えたモータ制御装置
【課題】モータ速度がノイズを多く含む場合にもノイズの粘性摩擦同定精度に与える影響を除去することができ、微小動作のみで粘性摩擦同定をすることができる粘性摩擦同定装置を備えたモータ制御装置を提供する。
【解決手段】入力指令が複数の周波数成分を含む周期信号であって、粘性摩擦同定装置107が、前記入力指令の複数の周波数成分におけるトルク指令と、前記入力指令の複数の周波数成分における前記モータ位置とに基づいて、粘性摩擦同定値を演算するものである。
(もっと読む)
指令補間方法
【課題】従来の指令補間方法は、制御実施期間が指令更新周期と等しく設定されているので、指令値の入力に遅れが生じた場合に制御停止期間が生じる。
【解決手段】本発明による指令補間方法は、制御周期121に補間値算出数を乗算した制御実施期間120が指令更新周期110よりも長く設定されており、第2指令値102が入力されたときから前記指令更新周期110が経過した際にも、第2指令値102と該第2指令値102の前に入力された第1指令値101とに基づく制御が行われる構成である。
(もっと読む)
流体圧アクチュエータの試験装置
【課題】試験体である流体圧アクチュエータに加える負荷の模擬を精度良く行うことが可能な試験装置を提供すること。
【解決手段】流体圧アクチュエータ1に連結され流体圧アクチュエータ1の変位を制御する負荷用アクチュエータ10と、流体圧アクチュエータ10に接続された第1及び第2ポート21,22と流体圧供給源23との連通を切り換えることによって、流体圧アクチュエータ1の作動を切り換える切換弁24と、流体圧アクチュエータ1に加える動的模擬負荷を制御する制御手段50とを備え、制御手段50は、負荷用アクチュエータ10によって制御される流体圧アクチュエータ1の変位と、切換弁24の動作によって制御される第1及び第2ポート21,22の圧力とに基づいて動的模擬負荷を制御する。
(もっと読む)
フィードフォワード信号を用いたディジタルサーボ制御装置
【課題】 モータ動作中の位置偏差を小さく、または、モータ位置決め時のオーバーシュート量を小さくすることができた、更に、モータ動作中の速度またはトルクフィードフォワード信号が量子化誤差の影響によるばたつきを低減して、モータが一定速度で動作している時の騒音を小さくすることができるフィードフォワード信号を用いたディジタルサーボ制御装置を提供する。
【解決手段】 フィードフォワード制御系が、位置指令に基づいて速度フィードフォワード信号vff0を生成する速度フィードフォワード作成部6と、前記位置指令に基づいてトルクフィードフォワード信号tffを生成するトルクフィードフォワード作成部8と、前記速度フィードフォワード信号vffおよび前記トルクフィードフォワード信号tffに基づいて速度フィードフォワード変更信号vffを生成する速度フィードフォワード変更部7と、を備える。
(もっと読む)
制御装置
【課題】開発効率を改善することが可能な制御装置を提供する。
【解決手段】操作量としてのソレノイド駆動デューティduty_solの入力から制御量としての実トルクTaの出力までの過程が複数の制御要素としてのソレノイド駆動回路2、油圧制御部3、クラッチ4及びギヤトレーン5に区分可能な自動変速機1を制御対象とし、実トルクTaに対する目標値Ttに基づいてソレノイド駆動デューティduty_solを演算する制御装置11において、制御要素2〜5のそれぞれと対をなすように設けられ、対応する制御要素の出力から入力を逆算するように構成された複数の逆算部12〜15を具備し、目標値が逆算部12〜15にて順次逆算されてソレノイド駆動デューティduty_solが演算されるように逆算部12〜15を制御要素とは逆順で組み合わせる。
(もっと読む)
処理機械用の閉制御ループをモデル化する方法
製品ウェブを処理するための処理機械用、例えばシャフトレス印刷機用の閉制御ループ(300)をモデル化する方法において、少なくとも1つのむだ時間(Tt,SENSOR,Tt,NET,Tt,SPS,T(v)R,T(v)D)をモデル化の際に考慮する。  (もっと読む)
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】 クーロン摩擦の影響を除去し、クーロン摩擦の大きな制御対象の慣性モーメントを高精度に同定することができ、その同定結果に基づいて制御対象を高精度に動作制御できる慣性モーメント同定器を備えたモータ制御装置を提供する。
【解決手段】 モータ位置基本周波数成分を入力し正規化モータ加速度矩形波を出力する正規化モータ加速度矩形波演算器109と、トルク指令基本周波数成分と前記正規化モータ加速度矩形波を入力しトルク指令正規化モータ加速度矩形波乗算値を出力するトルク指令正規化モータ加速度矩形波乗算値演算器110と、前記トルク指令正規化モータ加速度矩形波乗算値を入力しトルク指令正規化モータ加速度矩形波乗算値平均値を出力するトルク指令正規化モータ加速度矩形波乗算値平均値演算器111と、前記トルク指令正規化モータ加速度矩形波乗算値平均値とモータ位置振幅を入力し慣性モーメント同定値を出力する慣性モーメント演算器113と、を備える。
(もっと読む)
モータ制御装置
【課題】 制御則によらずクーロン摩擦同定が実施でき、トルク指令またはモータ速度が雑音信号を多く含み、最大静止摩擦などが存在する場合にも高精度に微少動作でクーロン摩擦同定を実施することができ、その同定結果に基づいて高精度な動作制御を実施できるモータ制御装置を提供する。
【解決手段】トルク指令周波数成分と正規化速度矩形波を入力しトルク指令正規化速度矩形波乗算値を出力するトルク指令正規化速度矩形波乗算値演算器111と、前記トルク指令正規化速度矩形波乗算値とモータ速度振幅を入力しトルク指令速度矩形波乗算値平均値を出力するトルク指令速度矩形波乗算値平均値演算器114と、前記トルク指令速度矩形波乗算値平均値と前記モータ速度振幅を入力しクーロン摩擦同定値を出力するクーロン摩擦演算器115と、を備える。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ
【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
サーボモータの駆動制御装置及び駆動制御方法
【課題】少ないメモリのCPUでも学習制御を可能とし、さらに学習時間の短縮を実現可能なサーボモータの駆動制御装置を提供する。
【解決手段】駆動制御装置10は、位置ループ制御系に追加された学習制御部24を有し、学習制御部24は反転動作前後の所定時間に限って学習制御を行うように構成されている。学習制御によって得られる速度指令を解析して求められる速度補正データは、反転動作時に発生する位置偏差を低減すべく速度指令の補正を行うために使用される。
(もっと読む)
101 - 120 / 358
[ Back to top ]