
Fターム[5H004HA07]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 変位、角度、位置、方向、姿勢 (358)
Fターム[5H004HA07]に分類される特許
21 - 40 / 358
制振制御装置、制振制御方法およびコンピュータプログラム
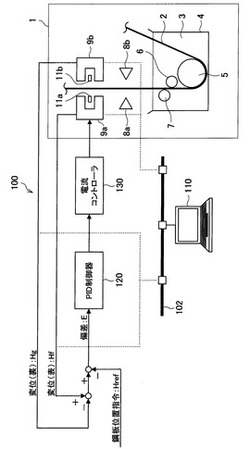
【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
周期外乱抑制装置および周期外乱抑制方法

【課題】システム同定モデル誤差を補正できる周期外乱抑制装置を提供する。
【解決手段】上位に制御指令値rnを発生する制御器を持ち、周期性外乱が発生する制御対象プラントPnの出力ynにおける、抑制制御対象とする周期外乱の周波数成分にシステム同定モデルの逆数で表現される逆システムを乗算して周期外乱を推定し、それを前記rnから差し引いて周期外乱dnを抑制する周期外乱オブザーバPDOと、周期外乱抑制制御中における周期外乱の各周波数成分が複素ベクトル平面に描くベクトル軌跡に基づいて、システム同定モデル誤差による位相誤差θrefを算出する位相算出手段(10,11)と、システム同定モデル誤差によるゲイン誤差Grefを算出するゲイン算出手段(20,21,22)と、前記θrefとGrefとを積算して求めた回転ベクトルPrefnを補正指令値として前記システム同定モデルを補正する。
(もっと読む)
強化学習装置、制御装置、および強化学習方法
【課題】従来、報酬関数を構成する多数の項の間で発生するトレードオフが、ロボットの運動学習の妨げとなっていた。
【解決手段】制御対象の環境に関する1以上の第一種環境パラメータの値を取得する第一種環境パラメータ取得手段と、1以上の第一種環境パラメータの値を報酬関数に代入し、報酬関数が出力する報酬を最大とするような1以上の制御パラメータの値を算出する制御パラメータ値算出手段と、1以上の制御パラメータの値を制御対象に対して出力する制御パラメータ値出力手段と、仮想外力に関連する1以上の第二種環境パラメータの値を取得する第二種環境パラメータ取得手段と、1以上の第二種環境パラメータを仮想外力関数に代入し、仮想外力を算出する仮想外力算出手段と、仮想外力を制御対象に対して出力する仮想外力出力手段とを具備する強化学習装置により、すばやくかつ安定して、ロボットの運動学習が行える。
(もっと読む)
プロセス制御の操作量プリセット方法
【課題】数式モデルによる予測と過去データとの類似性に応じた予測を切替えて使用する場合であっても、制御応答に急激な変化のない、安定した操作量設定を行うことができるプロセス制御の操作量プリセット方法を提供することを課題とする。
【解決手段】対象プロセスを表す数式モデルの入・出力値、および出力値と対象プロセスの実績値との誤差を収集するデータ収集ステップと、複数のデータを逐次蓄積するデータ蓄積ステップと、制御しようとする操業条件に対応した入力値と類似した入力値を有するデータを蓄積したデータ群から抽出したデータを用いて、前記数式モデルの出力誤差を予測する数式モデル誤差予測ステップと、前記数式モデルの出力誤差を加算あるいは乗算して、制御量の予測値とする制御量予測ステップと、前記制御量の予測値が所望の制御量と一致するように操作量を決定する操作量決定ステップとを有する。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
干渉力補償制御装置
【課題】可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供する。
【解決手段】連設されている第一可動部と第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて干渉力モデルを設定する。第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値110に基づいて第一基準推力指令値を算出する。第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値210と干渉力モデルとに基づいて、可動部間摩擦力の影響により第二可動部の動作に起因して第一可動部の動作に作用する第一干渉力を算出する。そして、第一基準推力指令値と第一干渉力とを加算することにより第一補償推力指令値を算出し、第一補償推力指令値に基づいて第一アクチュエータを制御する。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
プログラム、記録媒体、サーボドライバの制振制御の設定装置および設定方法
【課題】サーボドライバの制振制御の設定におけるユーザの作業性を向上させることを可能にする技術を提供する。
【解決手段】制振制御のパラメータを設定するためのプログラムが提供される。プログラムは、サーボモータの試運転のための運転パラメータを受付ける第1の入力部41と、サーボモータを試運転させるための要求を受付ける第2の入力部42と、制振制御を設定するための制御パラメータを受付ける第3の入力部(制振制御設定部50)とを有する設定ウィンドウW1を、表示装置の画面に表示させる。ユーザは、サーボモータのテスト運転および制振制御の設定を1つのウィンドウ(サブウィンドウW1)の中で行なうことができる。
(もっと読む)
タイムラインに基づく半順序プランニングの枠組み
【課題】計画がタイムラインの集合として形成された複数のタイムラインの形式で作成される環境における変数を表す、オンライン半順序プランニングシステムおよび方法を提供する。
【解決手段】開始点において、タイムラインの集合は、一貫性のないタイムラインの集合であり、システムおよび方法は、タイムラインの集合が一貫性を持つまで、タイムラインを体系的に改良する。
(もっと読む)
スライディングモード制御装置の制御入力設定方法
【課題】スライディングモード制御装置において、切換入力の平滑関数パラメータを理論的に決定できるようにする。
【解決手段】平滑関数パラメータδを、定常偏差σと切換入力unlとを座標軸とする座標上で定常偏差限界σeに安全率を見込んだ値σth[σe−安全率]と入力変動最大値dmaxとによって定まる点Paと座標の原点[0,0]とを結ぶ直線Laよりも切換入力軸側の範囲で設定することで、定常偏差限界σeの時に切換入力unlが入力変動最大値dmaxよりも上回るようになり、入力変動に対するロバスト性を確保することができる。このように、平滑関数パラメータδを、σ−unl座標を用いて定常偏差限界σeと入力変動最大値dmaxとに基づいて設定することで、平滑関数パラメータδを理論的に設定することが可能となり、作業者によるチューニング結果やチューニング工数のばらつきを低減することができる。
(もっと読む)
フィードバック制御装置
【課題】制御開始時の値付近での実制御量の停滞による応答遅れの増大が発生したときの実制御量のオーバーシュートを好適に抑制することのできるフィードバック制御装置を提供する。
【解決手段】第2ピストンの実変位RYを含むCSC2の状態量の検出及び推定を行うオブザーバー6と、目標軌道に追従して実変位RYが推移するように上記状態量に基づきマスターシリンダー1の供給電流を操作するとともに、実変位RYと目標軌道との偏差Eの累積値である誤差積分値Zに応じて供給電流を操作する積分器5を有したスライディングモードコントローラー4と、を備えるフィードバック制御装置において、実変位RYが制御開始時の値付近で停滞しているか否かを判定するとともに、停滞有りと判定されたときに、目標軌道及び推定状態量X0,X1,X2の初期化を指示する停滞監視部7を備えるようにした。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
フィードバック制御回路、フィードバック制御システム
【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
ロボットおよびその行動制御システム
【課題】上体の運動によって指定タスクを実行しながら、継続的に安定することができるロボット等を提供する。
【解決手段】本発明のロボット1または行動制御システム2によれば、確率遷移モデルにしたがって、腕体の運動状態を表わす「第1状態変数」の時系列的な変化態様が、第1状態変数のうち少なくとも1つがロボット1に指定タスクを実行させるための第1指定運動軌道{r}に追従するように生成される。また、同じく確率遷移モデルにしたがって、上体の運動状態を表わす「第2状態変数」の時系列的な変化態様が、第2状態変数が継続的に安定な動力学的条件を充足するように生成される。
(もっと読む)
デジタルサーボアンプシステムおよびそのパラメータ調整方法
【課題】デジタル制御を用いたサーボアンプシステムにおいて、パラメータ調整を迅速に進めるとともにパラメータ調整データを保護する。
【解決手段】デジタルサーボアンプシステムは、ネットワーク経由でパラメータを調整するパラメータ調整装置140を有する。センサ201〜203の信号と目標指令とをデジタル信号に変換し、パラメータ調整装置が調整したパラメータを用いてデジタル制御信号をサーボアンプユニット120が生成する。サーボアンプユニットは、デジタル変換されたセンサ信号と指令信号とを比較演算して制御信号を生成するサーボ制御部222と、演算に使用するパラメータを管理するパラメータ管理装置227とを有する。パラメータ管理装置は、パラメータ調整装置からのパラメータ更新通知に基づいて記憶装置226に更新されたパラメータを書込んでいるときは、サーボ制御部が記憶装置へアクセスすることを禁止する。
(もっと読む)
宇宙船の姿勢維持方法、制御モジュールおよび変位補正力の決定方法
【課題】この発明の実施の形態は、少なくとも1つの変位方向に対して変位した姿勢への宇宙船の変位に応じて宇宙船の編隊を維持する方法を開示する。
【解決手段】この発明の実施の形態は、少なくとも1つの変位方向に対して変位した姿勢への宇宙船の変位に応じて宇宙船の編隊を維持する方法を開示する。ここで、宇宙船は、補正力を発生するコマンドを生成することにより、補正力を発生するように、構成される。補正力は、宇宙船を変位方向に対して変位した姿勢に維持するように構成された基本力と、変位した姿勢での宇宙船の変位方向に対する編隊維持を最適化するように構成された余裕力との和の関数として決定される。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
21 - 40 / 358
[ Back to top ]