
Fターム[5H004HA07]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 変位、角度、位置、方向、姿勢 (358)
Fターム[5H004HA07]に分類される特許
141 - 160 / 358
サーボアクチュエータ

【課題】誰でも簡便にゲイン調整を行うことができるサーボアクチュエータの実現する。
【解決手段】モータの速度を制御する速度フィードバックループを有し、この速度フィードバックループにノッチフィルタ手段を挿入して機械共振を除去するサーボアクチュエータにおいて、前記速度フィードバックループの周波数応答特性を示すデータを取得するデータ収集手段と、前記データ収集手段で取得されたデータを移動平均処理する移動平均手段と、この移動平均手段で得られたデータと、前記データ収集手段で得られたデータとを比較して、前記速度フィードバックループの共振特性を抽出する比較手段と、前記比較手段で抽出された共振特性に基づいて前記ノッチフィルタ手段の周波数及びQ値を設定するノッチフィルタ設定手段と、を備えることを特徴とする。
(もっと読む)
移動体制御方法及び移動体制御装置

【課題】移動体の制振性能及び位置決め性能の低下を抑制する。
【解決手段】コントローラ5は、所定の駆動パターンで移動体の駆動を制御するためのものであって、移動体の位置又は速度に関する命令値に基づいて移動体のジャークパターンを生成する生成部6と、ジャークパターンを通過させて移動体の位置指令値を出力するフィルタ部7と、を備えている。ここで、コントローラ5では、ジャークパターンをフィルタ部7に通過させて位置指令値を得ることから、位置指令値において共振周波数成分等の振動を励振する周波数成分を低減させることができる。また、コントローラ5では、フィルタ部7の伝達関数から求められた遅れ時間だけジャークパターンを圧縮するように調整して、調整ジャークパターンを生成する。よって、命令値と位置指令値とを時間的に互いに一致させることができる。
(もっと読む)
液圧作動ブームの調整方法、装置およびコンピュータプログラム
本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
サーボ制御装置
【課題】機械特性に起因する振動を低減すると共に、往復時の軌跡を一致させるサーボ制御装置を得る。
【解決手段】微分器8は、位置指令信号を微分することにより速度フィードフォワード信号を演算する。演算器10は、微分器8による演算値を微分すると共に駆動対象機械の総イナーシャを乗算する。振動抑制フィルタ41は、演算器10による演算値から機械2の共振周波数成分を減衰し、反共振周波数成分を増幅することによりトルクフィードフォワード信号を演算する。フィードバック補償部5は、位置指令信号と速度フィードフォワード信号とトルクフィードフォワード信号とに基づいて機械2を駆動する。
(もっと読む)
位置制御装置
【課題】加減速の小さい動作領域において、制御対象プラントが振動特性を有していても、外乱抑制性能の向上を達成する位置制御装置を提供する。
【解決手段】指令応答性能を重視したPI制御器とロバスト外乱抑制性能を重視したロバスト制御器を並列配置した速度制御器を構成し、加速度情報に基づいて、これらを切換えて制御する。切換え時におけるロバスト安定性の確保と円滑な切換え動作を実現するため、切換え時間を持った漸次切換えやトルク補償を行う。
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
サーボ制御装置の支援装置
【課題】 機械装置の駆動源としてのサーボモータを所望の状態に制御するサーボ制御装置に好適な支援装置を提供する。
【解決手段】 支援装置5にはサーボ制御装置3内部のサーボモータ2の回転速度,トルクなどの信号データを予め定めた周期毎のサンプル点数N個を取込みつつ記憶する記憶データ部と、この記憶したデータN個のうちの任意の範囲を指定する範囲指定手段部と、この指定した範囲の前記データを高速フーリエ変換(FFT)演算をするFFT演算部および変換結果部と、この演算結果である周波数流域での変化などを表示する表示画面部とから形成することにより、任意の範囲を指定できるために、FFT演算部での演算結果には余分な周波数成分を含まないようにすることができる。
(もっと読む)
機械的共振周波数補償装置
【課題】共振周波数を算出する際の処理速度を向上させる。
【解決手段】サーボモータシステム1は、モータ2に接続されるサーボコントローラ3に機械的共振周波数補償装置21が設けられている。機械的共振周波数補償装置21は、エンコーダ4から速度フィードバック値が入力されるバンドパスフィルタ22と、共振周波数推定器23と、ノッチフィルタ係数発生器24とを備え、共振周波数推定器23は共分散行列の逆行列の値を用いた最小二乗理論によって算出される収斂値としてノッチフィルタの係数を求めるように構成されている。
(もっと読む)
ロボット制御カテーテルおよびその較正方法
心臓カテーテルのようなロボット装置を較正する方法は、第1振動周波数で第1振動ベクトルを与えることにより、第1作動軸において装置を振動させるステップを含む。装置を振動させている間に、装置の位置を周期的に測定して複数の位置データ点が生成され、複数の測定軸に関連して装置の位置が表されてもよい。その後、位置データ点は、フーリエ変換アルゴリズムのような信号処理アルゴリズムを用いて処理され、それにより装置の位置を作動軸の移動ベクトルに関連付ける伝達関数を導出する。伝達関数は、分解され、作動軸に対する較正ベクトルとして表現されてもよく、1つまたは複数の測定軸の各々に沿って方向づけられる、ゼロ成分を含む少なくとも1つの成分を含む較正ベクトルを含んでいてもよい。プロセスは、較正することが望ましい任意の作動軸に対して繰り返してもよい。 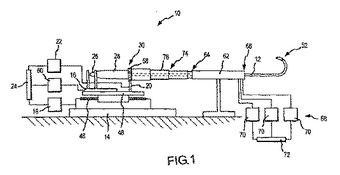 (もっと読む)
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック制御を行う。プラントへの制御入力である出力操作量UFMを保持操作量UHOLDに設定可能であるときは、出力操作量UFMを保持操作量UHOLDに設定するとともに、制御偏差の積算値ERRIを保持操作量UHOLDと比例項UPとの差に積分項ゲインKIの逆数を乗算することにより算出し、積算値ERRIに積分項ゲインKIを乗算して積分項UIを算出する。
(もっと読む)
拡張仮想パワーモニタを備えることにより制御対象の安定性を評価解析する機能を備えた制御システム
【課題】システムに対して流入する仮想パワーを観測することによって当該システムの安定性を評価解析する制御システム2に対して、その安定・不安定の判定を是正する。
【解決手段】ユーザ制御対象3と、ユーザ制御則5と、ユーザ制御対象3からのフィードバック信号を受けてユーザ制御対象3に操作量を入力し得る保守的な制御則Hと、保守的な制御則Hからユーザ制御対象3へ仮想的に伝達される仮想パワー及び保守的な制御則からの操作量の大きさ及びユーザ制御対象の出力の大きさを観測する拡張仮想パワーモニタ10と、を備える。拡張仮想パワーモニタ10は、仮想パワーPv(t)のa倍および保守的な制御則からの操作量の大きさを二乗したb倍及びユーザ制御対象の出力の大きさを二乗した−1倍を観測し、それによって安定性の評価関数Ex(t)に、ユーザ制御システムの入出力ゲインが小さいほど安定方向に移行させる項を含める。
(もっと読む)
サーボ制御装置
【課題】 モータ位置検出器を用いずに負荷位置検出器のみで安定且つゲインを大きく設定することができるようにする。
【解決手段】 負荷位置検出器と負荷位置検出値を用いて負荷加速度と躍度を演算する微分器と、それぞれにゲインを乗じて補償信号を算出する補償器と補償器の出力をトルク指令値に加算する加算器を備える。
(もっと読む)
リニアアクチュエータ
【課題】位置情報の差分値とサンプル時間に依存することなく速度情報を生成して制御帯域を上げることを可能とするリニアアクチュエータを実現する。
【解決手段】面モータを有するスライダの位置検出値と位置指令値との偏差を演算して速度指令値を出力する位置制御手段と、前記スライダの速度検出値と前記速度指令値との偏差を演算して前記面モータに推力指令を出力する速度制御手段とを具備するリニアアクチュエータにおいて、
前記位置検出値及び前記推力指令に基づいて、前記速度検出値を推定演算する状態推定器を備える。
(もっと読む)
多関節型ロボットの制御方法
【課題】従来のオブザーバ制御演算装置では、ロボット自身の姿勢やアームに取り付ける負荷の変化に対応して制御性能の劣化を防ぐには、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなる。
【解決手段】アームに取り付けられる複数の負荷に応じて予め調整されたパラメータを持つ複数の状態オブザーバと状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいてそれぞれの状態FB値のモータ電流指令への加算量を調整する際に、各姿勢におけるアーム回転半径の最大値に対する2乗比の1次関数として定義する姿勢ゲインを乗じることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、ロボットの姿勢変化に応じた振動抑制効果が得られる状態で演算時間を削減できる。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
駆動制御装置
【課題】広範囲な角速度指令に対して、安定で高精度な角速度追従特性と角度精度を実現可能にする。
【解決手段】応答可能範囲を拡大すべく駆動指令を生成していた過程に、立ち上がり、立下りを考慮したプロファイル型指令生成器4と、高精度な追従特性を得るべく2自由度型モデル追従補償器7とで構成された制御系を具備するとともに、該制御系の上位制御器として、要求される角速度で安定に駆動すべく要求プロファイルや補償器を適応的に切り替えたり、全体システムの安定性に関する評価指標をリアルタイムで算出しながら、コントローラを自動的に設定する最適制御器9を備えた構成を採用する。
(もっと読む)
フィードバック制御系の設計方法、設計プログラム、および設計支援装置
【課題】効率的に安定かつロバストな現実のシステムを設計すること。
【解決手段】制御系の共振モードを補償するノッチフィルタおよび共振モードを合成した全域通過フィルタがモデル化され(ステップS105)、全域通過フィルタを含む設計用制御対象が決定される(ステップS106)。そして、制御器に含まれる重み関数が導出された後(ステップS111)、設計者が設定した目標ゲイン交差周波数および位相余裕が用いられて、重み関数のゲインが調整される(ステップS112)。その後、位相進み重みに含まれる位相変数が決定されて、重み関数が確定される(ステップS113)。このようにして確定された重み関数および設計用制御対象に対してH∞ループ整形法が適用され(ステップS114)、H∞制御器が導出される(ステップS115)。
(もっと読む)
二自由度制御装置とその制御方法
【課題】 無駄時間を含む制御対象に対しても,前置補償器を最適に設定することにより,追従性能の高い二自由度制御装置を提供する。
【解決手段】 制御対象の状態量を検出して状態量検出値を生成する状態量検出器(106)と,状態量指令値を修正して状態量指令修正値を生成する前置補償器(102)と、前記状態量指令値からフィードフォワード操作量を生成するフィードフォワード制御器(101)と,状態量指令修正値と状態量検出値の差信号からフィードバック操作量を生成するフィードバック制御器(103)と,フィードフォワード操作量とフィードバック操作量との和を操作量指令値とし,操作量を操作量指令値に追従させる操作量制御器とを備えた二自由度制御装置において,前置補償器は可変であり,前置補償器の伝達関数が状態量指令値から状態量検出値までの伝達関数に等しくなるように自動調整する自動調整演算部(107)を備えた。
(もっと読む)
制御装置の調整方法
【課題】サンプリングデータの総数を抑えつつ制御対象の制御量に対するパラメータ値を適切に設定する。
【解決手段】制御対象の制御量に対するパラメータ値を設定し、当該パラメータ値に基づき当該制御対象を制御する制御装置の調整方法において、前記パラメータ値の設定を変えて、当該パラメータ値の設定値及び当該設定値に応じて前記制御対象から得られる前記制御量の二次元データである複数のサンプリングデータを取得し、前記複数のサンプリングデータを用いて前記設定値に対する前記制御量の特性関数を算定し、前記特性関数を所定の基準線に基づいて積分区間の全区間にわたって積分した積分値を算定し、前記積分値を等分する前記積分区間内の前記設定値を算定し、当該設定値を前記パラメータ値として決定する。
(もっと読む)
141 - 160 / 358
[ Back to top ]