
Fターム[5H004HA07]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 変位、角度、位置、方向、姿勢 (358)
Fターム[5H004HA07]に分類される特許
81 - 100 / 358
駆動制御装置
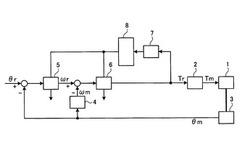
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
電空コントローラにおいて駆動値の変更を制限する方法および装置

電空コントローラにおいて駆動値の変更を制限する例示の方法および装置が開示される。開示する例示の方法は、制御信号およびフィードバック信号を受信することと、制御信号およびフィードバック信号から駆動値を算出することと、駆動値と以前の駆動値との差異が電空コントローラのスルー限界よりも大きいか否かを決定することと、スルー限界に基づいて算出された駆動値を変更することとを含む。 (もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
適応制御装置
【課題】 人工衛星の姿勢について適応制御を行う際、未知のパラメータの随時更新によって、推定及び更新項がフィードバック制御系ゲインに加えられることになり、見かけ上ゲインが変更されたことになり、制御系安定性に影響を与えるため、制御系設計上の制約が大きくなるという問題があった。
【解決手段】 未知パラメータの推定及び更新を、姿勢変更開始から終了までの間で非随時とすることで、姿勢変更時に発生する姿勢角度誤差を、当該更新以降で抑制することによって、制御系の安定性を損なうことなく外乱を抑制することができる。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法
【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
フィードバック制御装置
【課題】制御対象の状態が大きく変化する場合に、制御対象の出力検出値に含まれる揺動成分を確実に除去して、操作量の不必要な振動を回避する。
【解決手段】フィードバック制御を行う制御装置50において、制御対象14へ入力する操作量ICMDに基づいて制御対象14の出力を推定する制御対象モデル63aと、推定した出力と制御対象の検出値θcsとから算出した出力θ1から検出値θcsに含まれる検出値揺動量を算出するためのバンドパスフィルタ63c〜63eと、を備え、制御対象14の状態変化が大きくなるほど通過帯域幅を広げ、制御対象の状態変化が小さくなるほど通過帯域幅を狭める。
(もっと読む)
位置決め制御系の外乱非干渉化補償装置
【課題】いずれかの駆動体の加減速駆動により発生する外乱が機台を介して隣接する他の駆動体に伝達される装置において、隣接する駆動体から伝達される外乱による駆動体の位置決め精度の悪化の課題を、ソフトウエアの変更又は追加のみで解決できるようにする。
【解決手段】外乱の影響を受ける側の駆動体の観測量に対して外乱の非干渉化補償を行う外乱非干渉化補償器は、外乱発生側の駆動体の操作量ubを入力として、外乱の影響を受ける側の駆動体の観測量xlmに対する該外乱の非干渉化補償を行うためのフィードフォワード補償量ucを出力する第1のフィードフォワード補償器Fn1(s)と、外乱の影響を受ける側の駆動体の操作量Cl(s)の出力を第1のフィードフォワード補償器Fn1(s)の出力で補正する第1の演算器11とを備えている。
(もっと読む)
XYステージ
【課題】負荷の質量や、負荷とX軸駆動部との距離が変化した場合でも、安定して機械共振および反共振を吸収できるXYステージを実現する。
【解決手段】X軸方向に移動制御される第1部材と、この第1部材上に直交して結合しY軸方向に移動制御されると共に、前記第1部材との結合位置より所定距離を隔てて負荷が搭載された第2部材よりなるXYステージにおいて、
X軸指令値に基づいて前記第1部材を移動制御するX軸制御系と、
Y軸指令値に基づいて前記第2部材を移動制御するY軸制御系と、
前記X軸フィードバック制御系に挿入され、この制御系で発生する機械共振および反共振を吸収するようにパラメータが設定されているフィルタ手段と、
を具備し、
前記フィルタ手段は、前記Y軸制御系における前記負荷の情報を取得し、前記パラメータの設定値を更新する動的パラメータ設定部を備える。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
モータ駆動制御装置
【課題】制御入力の飽和による制御性能劣化や制御系の不安定化を確実に防止できるモータ駆動制御装置を得ること。
【解決手段】参照位置偏差算出部4aは制御入力計算部7の出力と入力との関係に基づいて、制御入力hが参照制御入力bに一致するための参照位置偏差dを算出する。位置補正量算出部5aは参照位置偏差dの絶対値が位置偏差eの絶対値よりも小さい場合、位置補正量fを位置偏差eが前記参照位置偏差dと一致するように算出して出力し、参照位置偏差dの絶対値が位置偏差eの絶対値よりも大きい場合は、前記位置補正量fをゼロにして出力する。指令値整形部6aは位置偏差eから位置補正量fを引き算して生成した修正位置偏差gを制御入力計算部7の入力信号とする。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
位置決め制御装置の振動抑制制御装置
【課題】フィルタ位相遅れの影響を受けずに振動の抑制を可能とする。
【解決手段】外乱オブザーバ10を用いた加速度制御系を含む位置決め制御装置の振動抑制制御装置において、位置指令の部分に低域通過フィルタ12を挿入し、位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記位置指令部分の低域通過フィルタ12のカットオフ周波数とする。ここで、前記位置指令の部分に加えて、速度フィードフォワード指令の部分にも低域通過フィルタ14を挿入し、前記位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記速度フィードフォワード指令部分の低域通過フィルタのカットオフ周波数とすることができる。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】制御対象の特性が複雑で情報が不完全なプラントの制御において、制御装置に内包された探索手段により自律的に抽出した、効率的な問題解決のための学習指針を用いることで、望ましい操作方法を制御周期以内で学習可能なプラントの制御装置を提供する。
【解決手段】本制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定するモデルと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、操作方法学習部における学習の制約条件及び学習結果に関する情報を保存する学習情報データベースと、所望のモデル出力が得られる運転条件に相当するモデル入力を探索する最適解探索部と、最適解探索部における探索の制約条件及び最適解探索に関する情報を保存する探索情報データベースとを備え、操作方法学習部は、最適解探索部で得られた最適な運転条件に関する情報を用いてモデル入力を生成する。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
移動体の駆動制御方法、露光方法、ロボット制御方法、駆動制御装置、露光装置、及び、ロボット装置
【課題】制御対象モデルに基づくフィードフォワード制御と外乱オブザーバとを利用して高精度な位置制御を行う。
【解決手段】駆動制御装置は、制御対象(301)の伝達特性の逆システムの一部を示す第1伝達関数(1021a)に第1の完全追従制御法を適用させることで第1のフィードフォワード信号(S1a)を求める第1フィードフォワード制御部(102a)と、制御対象(301)の伝達特性の逆システムの一部を示すとともに第1伝達関数(1021a)とは異なる第2伝達関数(1021b)に第2の完全追従制御法を適用させて第2のフィードフォワード信号(S1b)を求める第2フィードフォワード制御部(102b)と、第1のフィードフォワード信号(S1a)に対する第1の補償信号(d')を求める外乱オブザーバ(104)と、を備え、第2のフィードフォワード信号(S1b)と第1の補償信号(d')とから求めた第2の補償信号(S5)を用いて制御対象(301)を駆動する。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック操作量UFBを算出し、フィードバック操作量UFBを平均化することにより平均化フィードバック操作量UFBAVを算出する。プラントの作動状態に応じて保持操作量UHOLDを算出し、保持操作量UHOLDと平均化フィードバック操作量UFBAVとを設定比率KRに応じて合成し、修正保持操作量UHLDCを算出する。出力操作量UFMを一定値に保持できるときは、出力操作量UFMを修正保持操作量UHLDCに設定するとともに、フィードバック操作量UFBを修正保持操作量UHLDCに設定する。
(もっと読む)
81 - 100 / 358
[ Back to top ]